Пакеты для динамического анализа механизмов
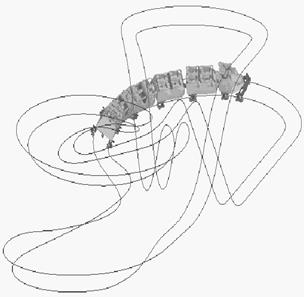
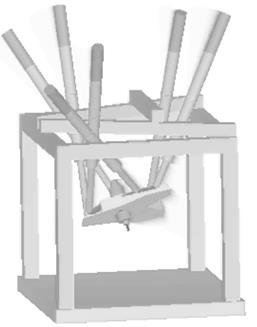
При динамическом анализе механизмов определяются силы, ускорения, скорости, расстояния и углы, возникающие в механической системе в процессе движения. Это могут быть как простейшие механические системы, например, маятник или брошенный камень, так и сложные механизмы, состоящие из множества деталей, например, автомобиль, самолет, станок или робот. Примеры некоторых динамических моделей представлены на рисунке 37.1.
| 
|
| Движение многозвенного поезда по «американским горкам» | Обработка на станке с параллельной кинематикой (гексаподе) |
Рисунок 37.1 – Примеры сложных механизмов
В первом приближении можно сказать, что изделие представляется как система абсолютно жестких деталей, связанных упругими связями и могущими перемещаться друг относительно друга. Упругие связи моделируют чаще всего зоны контакта (зоны повышенной податливости) между деталями. Математической основой таких пакетов являются системы нелинейных алгебро-дифференциальных уравнений, описывающих динамику отдельных частей исследуемого механизма.
Важнейшей особенностью пакетов для динамического анализа механизмов является то, что они не имеют ограничений на локальность перемещений, принятых в МКЭ. Это позволяет рассчитывать движение различных механических систем, составные части которых совершают большие перемещения в пространстве относительно друг друга. Если в процессе движения механической системы происходят изменения в ее структуре, например, разрушаются или заклиниваются какие-то шарниры, то соответствующие уравнения будут автоматически переформированы.
При работе в таких пакетах пользователь просто рисует на экране компьютера механическую систему, описывая ее звенья (body), соединяющие их шарниры (joint) и упругие элементы в шарнирах (пружины, spring). Звенья – это твердые тела, из которых состоит механическая система. Шарнир описывает подвижное соединение нескольких звеньев. Под шарнирами понимают как собственно шарнир (по типу дверной петли), так и любую поверхность, вдоль которой может скользить тело (направляющую скольжения, трехмерный кулачок, контакт шины автомобиля с дорогой и т.д.). Пружины описывают податливость и демпфирующие свойства шарниров.
Далее необходимо задать коэффициенты упругости и демпфирования пружин, коэффициенты (статический и динимаческий) силы трения в шарнирах, параметры воздействия на звенья механизма внешней среды, например, аэродинамического сопротивления или гравитации и т.д. Далее следует расставитьт «датчики» (sensor), программно записывающие значения выбранных параметров (сил в контактах, угловых и линейных ускорений и скоростей движени отдельных звеньев и т.д.) и описывает закон движения входного звена – «двигателя» (actuator). На основании этих данных пакет автоматически рассчитываются массово-инерционные характеристики частей системы и сформирует точные уравнения движения ее составных частей.
Усилия, действующие в механизме, могут затем быть переданы в МКЭ-пакет и использованы в качестве исходных данных для определения напряжений в деталях. В настоящее время стандартом де-факто программ для динамического анализа механизмов является пакет ADAMS от MSC.Software, занимающий более 2/3 мирового рынка.
Дата добавления: 2016-10-07; просмотров: 1892;
Поиск по сайту
Узнать еще
- A ... метка (без метки) на шатуне (стрелка) для 26.20b Измерение внутреннего диаметра
- Andante cantabile con espressione В. Моцарт. Соната для ф-п. № 8, ч. II
- Andantino con moto А. Бородин. Для берегов отчизны дальней
- Audit Trail - Материалы для проведения аудиторской проверки
- I. Установка для исследования сдвига фаз колебаний силы тока и напряжения с помощью компьютера и осциллографа-приставки
- I.10. Тесты для контроля знаний
- III и IV нейроны слухового пути. Третьи и четвертые нейроны слухового проводящего пути. Ядра слухового анализатора. Признаки поражения слухового пути.
- III. Порошки для стирки и мытья

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
