Синтез асинхронних цифрових автоматів
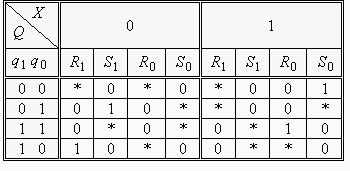
Для автомата, заданого закодованою таблицею переходів (табл. 7.5), розробимо функціональну схему з використанням JK-тригерів асинхронного типу.
Таблиця 7.5.
| X Q | x1x0 | Y | |||
| q1 q2 | |||||
| 0 0 | |||||
| 0 1 | |||||
| 1 1 | |||||
| 1 0 | – | – |
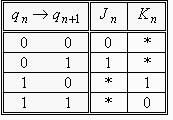
На основі таблиці переходів JK-тригера побудуємо характеристичну таблицю (табл. 7.6).
Таблиця 7.6.
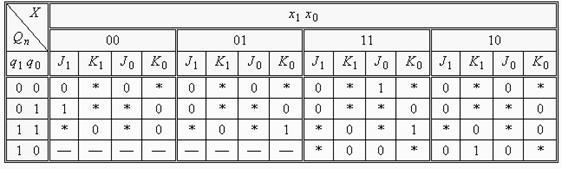
Розробимо таблицю для визначення функції збудження тригерів автомата. Таблиця будується аналогічно табл. 7.4. Після підстановки в табл. 7.5 значень входів тригерів з характеристичної таблиці (табл. 7.6) отримаємо табл. 7.7.
Таблиця 7.7.
Карта функції виходу будується на основі табл. 7.5 (рис. 7.17, а).
Будуємо карти Карно для функцій збудження JK-тригерів (рис. 7.17, б – д).
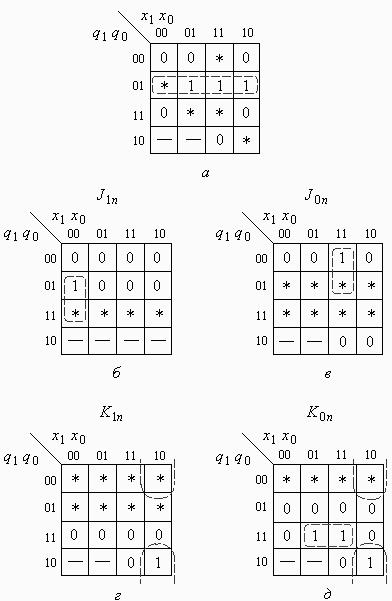
Рис.7.17. Отримання функцій збудження тригерів
Мінімізовані функції збудження тригерів мають вигляд:

З карти Карно функції виходу отримуємо:
 .
.
За отриманими функціями будується комбінаційна схема автомата і його функціональна схема (рис. 7.18).
Рис.7.18. Функціональна схема автомата
Важливим етапом синтезу автоматів є формалізація його опису за допомогою часових діаграм. З цією метою розглянемо приклад синтезу автомата, функціонування якого задається словесним описом.
Наступний приклад – задача про світлофор. Розглянемо завантажену автомагістраль, що перетинається сільською дорогою, по якій іноді проїжджають автомобілі. Якщо на перехресті відсутній світлофор, то автомобіль, що рухається по сільській дорозі, не зможе пересікти магістраль через безперервний потік транспорту по ній. Нераціонально встановлювати світлофор періодичної дії, оскільки він буде в більшості безпідставно гальмувати рух по автомагістралі.
Для забезпечення регулювання руху на перехресті необхідно встановити світлофор, який повинен зупиняти рух по автомагістралі тільки в тому випадку, коли біля перехрестя на сільській дорозі зупиняється автомобіль. Рух по автомагістралі забезпечується при зеленому кольорі світлофора, а зупинка – при червоному.
Необхідно розробити схему керування світлофором, яка сприймає сигнали від двох датчиків – реле часу і датчика тиску. Реле часу працює в періодичному режимі, формуючи сигнал  протягом 30 сек і
протягом 30 сек і  протягом 60 сек. Червоний сигнал світлофора для автомобілів, що рухаються по автомагістралі, а зелений – для автомобілів сільської дороги можуть вмикатися лише на інтервалі (30 сек). Датчик тиску формує сигнал
протягом 60 сек. Червоний сигнал світлофора для автомобілів, що рухаються по автомагістралі, а зелений – для автомобілів сільської дороги можуть вмикатися лише на інтервалі (30 сек). Датчик тиску формує сигнал  при наявності стоячого автомобіля на сільській дорозі перед перехрестям і
при наявності стоячого автомобіля на сільській дорозі перед перехрестям і  при його відсутності.
при його відсутності.
Виконаємо послідовно кроки, які приведуть до синтезу необхідного скінченного автомата.
Етап 1. Формалізація закону функціонування автомата.
Побудова ПТП автомата можлива при одночасній або попередній побудові часових діаграм його роботи, на яких необхідно відобразити всі можливі ситуації на перехресті (рис. 7.19).
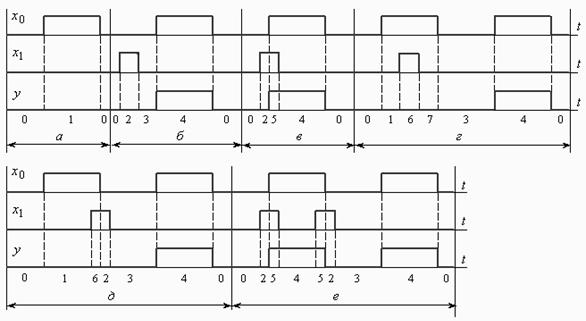
Рис.7.19. Часова діаграма роботи автомата
Допустимо, що часовий сигнал від реле часу відсутній, тобто  , і автомобілі на дорозі відсутні (
, і автомобілі на дорозі відсутні (  ). Тоді
). Тоді  (див. рис. 7.19, а). Позначимо внутрішній стан для такої ситуації 0 (00, 0) (перша цифра вказуватиме на номер внутрішнього стану, а три інші – в дужках – значення входів
(див. рис. 7.19, а). Позначимо внутрішній стан для такої ситуації 0 (00, 0) (перша цифра вказуватиме на номер внутрішнього стану, а три інші – в дужках – значення входів  та
та  і значення у). Оскільки цей стан є стійким, то його номер виділимо дужками.
і значення у). Оскільки цей стан є стійким, то його номер виділимо дужками.
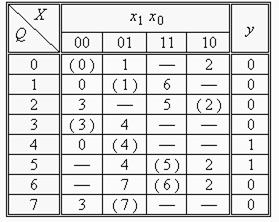
Таким шляхом є реальна можливість одночасної побудови ПТП. Оскільки автомат світлофора має лише дві вхідні змінні, то його ПТП має чотири стовбці (табл. 7.8).
Таблиця 7.8.
Якщо автомат знаходиться в стійкому стані (0), а реле часу змінить вихідний сигнал на  , то вихідний сигнал у повинен залишатися рівним 0. Звідси маємо наступний стійкий стан (1) при (01, 0). Для того, щоб автомат перейшов зі стійкого стану (0) в (1), необхідно в нульовому рядку при
, то вихідний сигнал у повинен залишатися рівним 0. Звідси маємо наступний стійкий стан (1) при (01, 0). Для того, щоб автомат перейшов зі стійкого стану (0) в (1), необхідно в нульовому рядку при  поставити 1 без дужок. Цим забезпечується простий перехід з нульового стану в перший при зміні комбінації вхідних сигналів 00 ® 01 (рис. 7.19, а).
поставити 1 без дужок. Цим забезпечується простий перехід з нульового стану в перший при зміні комбінації вхідних сигналів 00 ® 01 (рис. 7.19, а).
Допустимо тепер, що сигнал повертається тепер в попереднє значення , коли автомат знаходиться у стійкому стані (1). Повернення в стійкий стан відбувається через нестійкий перехід 0, що встановлюється при  і
і  .
.
Розглянемо тепер іншу ситуацію (рис. 7.19, б), коли автомат знаходиться в стійкому стані (0) і перед перехрестям на сільській дорозі з’являється автомобіль. Перш за все, необхідно визначитись з характером сигналу . Найбільш реально, що це повинен бути короткочасний імпульс (приймемо його одиничним), тривалість якого визначається тривалістю положення колеса автомобіля, що рухається, на датчику тиску. Тобто тривалість його набагато менша тривалості імпульсу . При появі короткочасного імпульсу  сигнал у також повинен залишатися рівним 0, оскільки . Такій ситуації припишемо стійкий стан (2), який запишемо в ПТП при
сигнал у також повинен залишатися рівним 0, оскільки . Такій ситуації припишемо стійкий стан (2), який запишемо в ПТП при  і
і  .
.
Нехай автомат знаходиться у стані (2) і змінюється з 1 в 0, тобто маємо перехід 10 ® 00. Але це не значить, що за цим слідує зміна стану (2) в (0), оскільки в такому випадку не буде врахований факт стоячого біля перехрестя автомобіля. Звідси витікає, що зі стану (2) автомат повинен перейти в новий стан (3), при якому . Особливістю стану (3) є те, що протягом наступного дозволяючого інтервалу від реле часу вихідний сигнал у повинен прийняти значення 1 (  ). Такий стан позначимо (4) (рис. 7.19). В ПТП заповнюється рядок з
). Такий стан позначимо (4) (рис. 7.19). В ПТП заповнюється рядок з  , в тому числі і клітка першого стовпця, оскільки при переході
, в тому числі і клітка першого стовпця, оскільки при переході  автомат перейде в стан (0).
автомат перейде в стан (0).
Розглянемо тепер дещо іншу ситуацію, яка полягає в тому, що при появі автомобіля на сільській дорозі ( ) безпосередньо перед початком дозволяючого часового інтервалу ( ) вона повинна бути пропущена через перехрестя ( ). На рис. 7.19, в така послідовність відображається відповідно зміною станів:
 .
.
У таблиці ПТП з’явиться рядок з  з відповідними переходами.
з відповідними переходами.
На рис. 7.19, г маємо іншу ситуацію, яка полягає в тому, що автомобіль, появившись на перехресті в дозволеному інтервалі часу, буде пропущений світлофором у наступному дозволяючому інтервалі. Така ситуація характеризується наступною зміною станів:
 .
.
У даному випадку вводяться два нові стани – (6), оскільки він відрізняється від (5) тим, що , і (7), який відрізняється від (1) тим, що інформація про появу автомобіля повинна зберегтись у пам’яті автомата. Відповідні зміни робляться і в ПТП, тобто в стані (1) при  виникає перехід у нестійкий стан 6, з якого при тій же комбінації вхідних сигналів відбувається перехід у стійкий стан (6). Зі стійкого стану (6) при відбувається перехід у нестійкий стан 7, а потім в (7); і, нарешті, при зі стану (7) автомат переходить в
виникає перехід у нестійкий стан 6, з якого при тій же комбінації вхідних сигналів відбувається перехід у стійкий стан (6). Зі стійкого стану (6) при відбувається перехід у нестійкий стан 7, а потім в (7); і, нарешті, при зі стану (7) автомат переходить в  .
.
Наступна ситуація характеризується тим, що автомобіль, який з’явиться біля перехрестя в кінці дозволеного інтервалу часу, повинен бути пропущений у наступному дозволяючому інтервалі часу (рис. 7.19, д). Робота автомата характеризується послідовністю зміни станів:
 .
.
У ситуації, що розглядається, нові стани не вводяться, але з’являється новий перехід  при вхідній комбінації , що і відображено в ПТП появою нестійкого стану 2 в рядку з
при вхідній комбінації , що і відображено в ПТП появою нестійкого стану 2 в рядку з  при .
при .
Насамкінець, розглянемо ще одну ситуацію, яка характеризується тим, що до перехрестя наближаються два автомобілі, причому перший з них попадає на початок дозволеного інтервалу, а другий – на його кінець. Відповідні часові діаграми приведені на рис. 7.19, е. Аналогічно попередній ситуації, маємо новий перехід  при , що і відображено в ПТП появою нестійкого стану 2 в рядку при .
при , що і відображено в ПТП появою нестійкого стану 2 в рядку при .
Якщо не передбачається інших ситуацій, то можна вважати, що побудова ПТП закінчена. Незаповнені клітки заповнюються рисками.
Етап 2. Мінімізація кількості станів автомата.
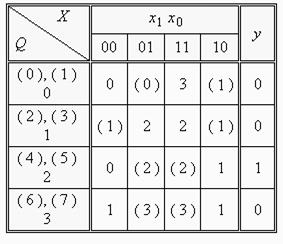
Аналіз ПТП показує, що деякі стани є сумісними. Такими є стани 0 і 1; 2 і 3; 4 і 5; 6 і 7. Об’єднуючи ці стани і вводячи нові позначення:
 ;
;  ;
;  ;
;  ,
,
отримуємо скорочену таблицю переходів (табл. 7.9).
Таблиця 7.9.
Етап 3. Кодування станів автомата.
Перш ніж кодувати стани автомата, побудуємо його граф переходів, який допоможе визначитись з можливістю сусіднього кодування. Граф-схема автомата приводиться на рис. 7.20.
Рис.7.20. Граф переходів автомата
З вигляду граф-схеми бачимо, що в ній є замкнуті контури з непарною кількістю вершин  . Але є можливість замінити простий перехід
. Але є можливість замінити простий перехід  складним
складним  через проміжний стан
через проміжний стан  , що дає можливість отримати граф, зображений на рис. 7.21. Вказана заміна не порушує закону функціонування автомата, оскільки стан (3) для
, що дає можливість отримати граф, зображений на рис. 7.21. Вказана заміна не порушує закону функціонування автомата, оскільки стан (3) для  є нестійким.
є нестійким.
Рис.7.21.
Змінивши граф-схему автомата, внесемо корекцію в таблицю переходів. У ній необхідно передбачити перехід з  в при , тобто в відповідній клітці внести заміну стану (1) на (3). Завершивши перекодування таблиці переходів, виконаємо сусіднє кодування автомата (табл. 7.10). При цьому для побудови автомата достатньо всього двох тригерів. З граф-схеми автомата (кодові значення станів під їх кодами) бачимо, що будь-який перехід з одного стану в інший відбувається зміною лише одного розряду коду.
в при , тобто в відповідній клітці внести заміну стану (1) на (3). Завершивши перекодування таблиці переходів, виконаємо сусіднє кодування автомата (табл. 7.10). При цьому для побудови автомата достатньо всього двох тригерів. З граф-схеми автомата (кодові значення станів під їх кодами) бачимо, що будь-який перехід з одного стану в інший відбувається зміною лише одного розряду коду.
Таблиця 7.10.
| Таблиця 7.11.
|
Суміщаючи табл. 7.9 і табл. 7.10, отримаємо кодову таблицю переходів, що приведена в табл. 7.11.
Етап 4. Визначення функцій збудження ЕП і функції виходів автомата.
Для реалізації автомата виберемо асинхронні RS-тригери, а комбінаційну частину реалізовуватимемо в базисі І-НІ.
Визначимо функції збудження входів автомата. Для цього табл. 7.11 з врахуванням значень, заданих в характеристичній табл. 7.2, перетворюється в таблицю функцій збудження входів тригерів (табл. 7.12).
Таблиця 7.12.
Будуємо функції збудження входів тригерів у вигляді карт Карно (рис. 7.22, а – г) і функцію виходу (рис. 7.22, д):
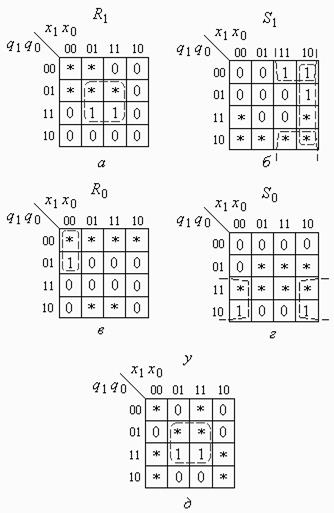
Рис.7.22. Отримання рівнянь збудження тригерів
Мінімізовані функції збудження входів автомата:
 ;
;
 ;
;
 ;
;
 .
.
Функція виходу автомата:
 .
.
Етап 5. Побудова функціональної схеми у вибраному елементному базисі.
Функціональна схема в базисі І-НІ реалізується з урахуванням того, що
 ,
,
 .
.
Схема приводиться на рис. 7.23.
Рис.7.23. Принципова схема автомата
Проаналізуємо лише одну з ситуацій, що описувались вище. Допустимо, що подається сигнал при , тобто з’явився автомобіль на сільській дорозі до появи дозволяючого інтервалу часу. В цьому випадку на виході DD7 виникне сигнал низького рівня  , який встановить тригер DD9 в стан
, який встановить тригер DD9 в стан  . Оскільки , то сигнал
. Оскільки , то сигнал  через DD4 встановлює DD8 в стан
через DD4 встановлює DD8 в стан  . Тому при появі дозволяючого сигналу сигнал
. Тому при появі дозволяючого сигналу сигнал  інвертується, і
інвертується, і  встановлюється в 1. У той же час, встановлює DD9 в стан
встановлюється в 1. У той же час, встановлює DD9 в стан  , а
, а  . При і з’являється
. При і з’являється  , що встановлює
, що встановлює  .
.
Розглянутий приклад, як видно, об’єднує в собі всі етапи проектування автомата. Оскільки всі етапи достатньо формалізовані, то найбільшу складність має уміння чітко формалізувати задачу, проаналізувати всі можливі режими автомата і пов’язати їх між собою.
Розглянемо ще один приклад. Необхідно побудувати систему керування ключами перетворювача напруги, що зображений на рис. 7.24.
Рис.7.24. Схема перетворювача напруги
Часові діаграми роботи ключів приведені на рис. 7.25.
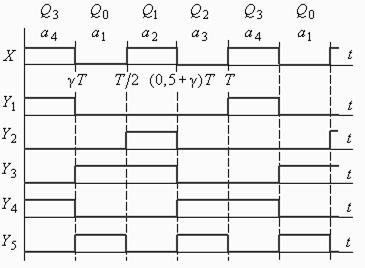
Рис.7.25.
Розглянемо систему керування ключами як асинхронний потенційний автомат. На часових діаграмах роботи ключів перетворювача виділимо чотири внутрішні стани автомата  (рис. 7.25), зміна яких відбувається під впливом широтно-модульованого вхідного сигналу х, частота якого в два рази перевищує частоту комутації
(рис. 7.25), зміна яких відбувається під впливом широтно-модульованого вхідного сигналу х, частота якого в два рази перевищує частоту комутації  перетворювача.
перетворювача.
Таблиця ПТП матиме чотири стани при двох стовбцях (табл. 7.13).
Таблиця 7.13.
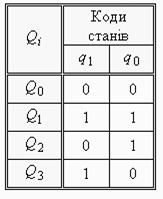
З аналізу таблиці витікає, що еквівалентних, псевдоеквівалентних і сумісних станів в ПТП немає, тому її можна вважати скороченою. Для чотирьох станів використовується два ЕП, значення яких дають можливість закодувати стани відповідно до табл. 7.13, використовуючи сусіднє кодування. Граф автомата (рис. 7.26) підтверджує можливість сусіднього кодування.
Рис.7.26. Граф переходів автомата
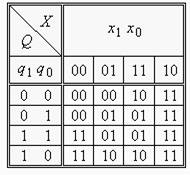
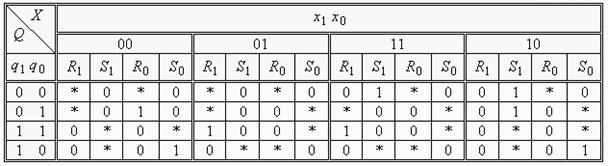
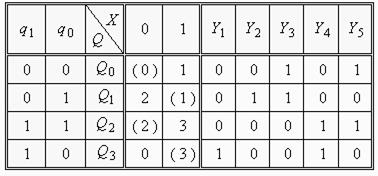
Кодована таблиця переходів приводиться в табл. 7.14, а таблиця збудження потенційних RS-тригерів – в табл. 7.15.
Таблиця 7.14.
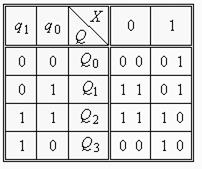
| Таблиця 7.15.
|
Будуємо карти Карно для функцій збудження входів тригерів (рис. 7.27, а – г).

Рис.7.27. Карти Карно для функцій збудження тригерів
Мінімізовані функції збудження мають вигляд:
 ; ;
|  ; ;
|
 ; ;
|  . .
|
Будуємо карти Карно для функцій виходів автомата, скориставшись табл. 7.13. Вони приводяться на рис. 7.28, а – д.
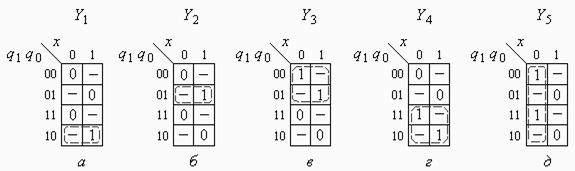
Рис.7.28. Карти Карно для функцій виходів автомата
Мінімізовані функції виходів матимуть вигляд:
 ;
;  ;
;  ;
;  ;
;  .
.
Функціональна схема автомата приводиться на рис. 7.29.
Рис.7.29. Принципова схема автомата
Розглянемо схему і її відповідність часовим діаграмам.
У початковому стані і  маємо
маємо  і
і  . На решті виходів – нульові рівні сигналів. При переході в перший стан при
. На решті виходів – нульові рівні сигналів. При переході в перший стан при  . Тригер DD7 встановлюються в значення , внаслідок чого маємо
. Тригер DD7 встановлюються в значення , внаслідок чого маємо  ,
,  ,
,  ,
,  . При переході в стан
. При переході в стан  при підготовлений на попередньому стані тригер DD6 встановлюється у значені , внаслідок чого проходить зміна вихідних сигналів:
при підготовлений на попередньому стані тригер DD6 встановлюється у значені , внаслідок чого проходить зміна вихідних сигналів:  ,
,  ,
,  ,
,  ,
,  . При зміні сигналу х в настає стан , і через DD5 тригер DD7 переходить в стан при
. При зміні сигналу х в настає стан , і через DD5 тригер DD7 переходить в стан при  . Внаслідок такої зміни маємо
. Внаслідок такої зміни маємо  , ,
, ,  ,
,  , . При послідовній зміні вхідного сигналу в тригер DD6 елемент DD3 встановлюється в нуль. Приведений аналіз показує, що функціональна схема розробленого автомата повністю відповідає заданому алгоритму роботи.
, . При послідовній зміні вхідного сигналу в тригер DD6 елемент DD3 встановлюється в нуль. Приведений аналіз показує, що функціональна схема розробленого автомата повністю відповідає заданому алгоритму роботи.
Дата добавления: 2016-09-26; просмотров: 3617;
Поиск по сайту
Узнать еще
- III. Биосинтез крахмала и гликогена.
- Iii. строение, биосинтез и биологическое действие гормонов
- Імпульсні схеми на цифрових елементах
- Активация аминокислот при биосинтезе белка.
- Анаболизм прокариот. Биосинтез углеводов
- Аналіз автоматів з D-тригерами
- Аналіз автоматів з JK-тригерами
- Анализ и синтез систем автоматического управления электроприводами

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
