Тема лекции 11 Основы общей компоновки грузовых автомобилей (продолжение)
11.1 Влияние параметров компоновки автомобиля на его проходимость
Условие возможного движения автомобиля (автопоезда) без буксования ведущих колес может быть записано в виде
Gсц 
 Gа
Gа  , (11.1)
, (11.1)
где Gсц - сцепной вес автомобиля;  - коэффициент сцепления шин с дорогой; Gа - полный вес автомобиля (автопоезда); - коэффициент суммарного дорожного сопротивления: =
- коэффициент сцепления шин с дорогой; Gа - полный вес автомобиля (автопоезда); - коэффициент суммарного дорожного сопротивления: =  ; f - коэффициент сопротивления качению; i — угол подъема дороги.
; f - коэффициент сопротивления качению; i — угол подъема дороги.
Из формулы следует, что
Gсц/ Gа ( )/ . (11.2)
Левая часть этого неравенства определяется компоновкой автомобиля и называется коэффициентом сцепного веса:
 = Gсц/ Gа. (11.3)
= Gсц/ Gа. (11.3)
Для обеспечения удовлетворительной проходимости автомобиля (автопоезда) без груза на скользкой дороге рекомендуется при компоновке автомобиля не допускать, чтобы коэффициенты сцепного веса были ниже указанных в «Показателях и нормативах проходимости».
11.2 Влияние параметров компоновки на плавность хода автомобиля
Плавность хода автомобиля и вибронагруженность рабочего места водителя во многом определяются компоновкой автомобиля. Влияние параметров компоновки автомобиля на плавность его хода выражается коэффициентом распределения подрессоренной массы:
 (11.4)
(11.4)
где  - центральный момент инерции массы
- центральный момент инерции массы  относительно горизонтальной поперечной оси автомобиля; - подрессоренная масса автомобиля;
относительно горизонтальной поперечной оси автомобиля; - подрессоренная масса автомобиля;  - координаты центра массы относительно осей передних и задних колес.
- координаты центра массы относительно осей передних и задних колес.
Если коэффициент  равен единице или близок к этому значению (0,9... 1,1), то колебания передней и задней подвесок автомобиля можно рассматривать независимо друг от друга. При этом можно считать, что колебания передней подвески практически не вызывают колебаний задней, и, наоборот, чем больше коэффициент е отличается от единицы, тем больше влияние колебаний одной подвески на колебания другой.
равен единице или близок к этому значению (0,9... 1,1), то колебания передней и задней подвесок автомобиля можно рассматривать независимо друг от друга. При этом можно считать, что колебания передней подвески практически не вызывают колебаний задней, и, наоборот, чем больше коэффициент е отличается от единицы, тем больше влияние колебаний одной подвески на колебания другой.
Вибронегруженность рабочего места водителя оценивается среднеквадратическим значением вертикальных ускорений колебаний.
Так, например, по данным расчетов для бортового автомобиля типа МАЗ при =0,8 среднеквадратичное значение вертикальных ускорений колебаний рамы над передним мостом при движении по реальной дороге на 15 % больше ускорений колебаний при =1, а при =0,6 они больше на
50 %.
Следовательно, необходимо определить зависимость показателей плавности хода от коэффициента и влияние отдельных компоновочных параметров на его значение.
Для этого представим подрессоренную массу груженого автомобиля как состоящую из подрессоренной массы автомобиля в снаряженном состоянии с экипажем массой  и массой полезного груза
и массой полезного груза  . Момент инерции подрессоренной массы груженого автомобиля определяется по формуле:
. Момент инерции подрессоренной массы груженого автомобиля определяется по формуле:
 (11.5)
(11.5)
где  - центральные моменты инерции масс и относительно горизонтальной поперечной оси автомобиля;
- центральные моменты инерции масс и относительно горизонтальной поперечной оси автомобиля;  - расстояния от центра масс и до центра подрессоренной массы груженого автомобиля.
- расстояния от центра масс и до центра подрессоренной массы груженого автомобиля.
Предполагая, что полезный груз равномерно распределен по длине платформы, определяем момент инерции полезного груза:
 (11.6)
(11.6)
где  - внутренняя длина платформы.
- внутренняя длина платформы.
По данным экспериментов, радиус инерции подрессоренной массы грузового автомобиля большой грузоподъемности с кабиной над двигателем в снаряженном состоянии и с экипажем из трех человек составляет примерно 1,33 м, следовательно, можно записать

где  - радиус инерции массы .
- радиус инерции массы .
Соответственно для самосвала с экипажем из двух человек

Все величины, входящие в выражения (4.7)...(4.9), легко определяются из каталогов. После подстановки их в выражение (4.6) получим, что значения коэффициента для двухосных грузовых автомобилей находятся в пределах 0,6... 1.
Результаты расчетов с использованием математической модели движения автомобиля по реальной дороге показывают, что значения среднеквадратичных ускорений во всех точках с уменьшением коэффициента увеличиваются, причем среднеквадратичные значения вертикальных ускорений колебаний рамы над передним мостом значительно меняются при <0,9, а продольно-угловые колебания - во всем диапазоне значений . При проведении расчетов все параметры автомобиля остаются неизменными, кроме , который изменяется в заданных пределах.
Для оценки влияния отдельных компоновочных параметров на коэффициент и определения условий, которым должна удовлетворять компоновка автомобиля с точки зрения хорошей плавности хода, рассмотрим влияние изменения следующих компоновочных параметров на коэффициент : колесной базы L1, распределения веса автомобиля по мостам (G1 и G2), длины платформы L12 и расстояния lп от переднего моста до задней стенки кабины.
При изменении колесной базы L1 в широких пределах значение меняется незначительно.
При возрастании грузоподъемности автомобиля с увеличением передней осевой нагрузки значения коэффициента быстро уменьшаются, следовательно, плавность хода ухудшается.
Длина платформы L12, при заданных колесной базе и распределении осевых нагрузок, определяется размером lп. С его уменьшением длина платформы увеличивается. Так как момент инерции  полезного груза является функцией квадрата размера L12, то сравнительно небольшое изменение lп заметно сказывается на коэффициенте .
полезного груза является функцией квадрата размера L12, то сравнительно небольшое изменение lп заметно сказывается на коэффициенте .
Смещение задней стенки кабины вперед нельзя рассматривать отдельно от возможного смещения сиденья водителя и, следовательно, удаления сиденья водителя из зоны комфорта. При этом среднеквадратические значения вертикальных ускорений основания сиденья водителя возрастают, поэтому применяют подвеску кабины и подвеску сиденья.
Снижение передней осевой нагрузки с целью повышения плавности хода является нежелательным, так как при этом снижается грузоподъемность, а следовательно, и производительность автомобиля.
11.3 Влияние параметров компоновки автомобиля на его устойчивость и управляемость
Основными компоновочными параметрами, определяющими устойчивость автомобиля против поперечного опрокидывания, являются высота центра масс и ширина колеи. Если пренебречь податливостью подвески и шин, коэффициент поперечной устойчивости против опрокидывания  можно определить по формуле, приведенной ранее.
можно определить по формуле, приведенной ранее.
Изменяя колею колес и высоту центра масс в допустимых пределах, обеспечивают требуемую устойчивость автомобиля против поперечного опрокидывания. Для современных грузовых автомобилей = 0,6...0,9.
Устойчивость управления автомобилем зависит от распределения осевых нагрузок и коэффициентов сопротивления уводу шин передних и задних колес. Измерителем устойчивости автомобиля в зависимости от этих параметров является коэффициент поворачиваемости, значения которого определяются из выражения:
 (11.7)
(11.7)
где G1, G2 - соответственно передняя и задняя осевые нагрузки;  - коэффициенты сопротивления уводу соответственно передних и задних колес.
- коэффициенты сопротивления уводу соответственно передних и задних колес.
При  < 1 автомобиль имеет недостаточную поворачиваемость, а при > 1 - избыточную. Чем больше значение коэффициента поворачиваемости автомобиля, тем больше его предрасположенность к заносам.
< 1 автомобиль имеет недостаточную поворачиваемость, а при > 1 - избыточную. Чем больше значение коэффициента поворачиваемости автомобиля, тем больше его предрасположенность к заносам.
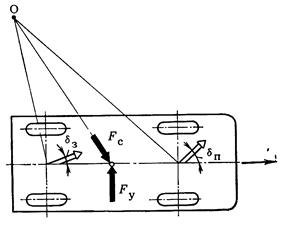
Движение автомобиля с недостаточной поворачиваемостью, когда управляемые колеса находятся в нейтральном положении, показано на рисунке 11.1. В этом случае центробежная сила Fc противодействует случайной поперечной внешней силе  , уводы середин мостов (
, уводы середин мостов (  и
и  ) уменьшаются, что способствует выравниванию направления движения автомобиля.
) уменьшаются, что способствует выравниванию направления движения автомобиля.
| 
|
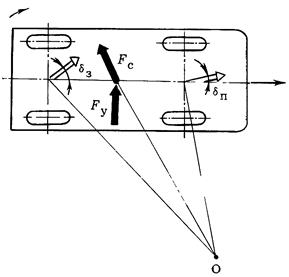
| Рисунок 11.1. Схема движения автомобиля с недостаточной поворачиваемостью при действии поперечной силы | Рисунок 11.2. Схема движения автомобиля с избыточной поворачиваемостью при действии поперечной силы |
Движение автомобиля с избыточной поворачиваемостью, когда управляемые колеса находятся в нейтральном положении, показано на рисунке 11.2. В этом случае центробежная сила Fc действует в том же направлении, что и случайная поперечная внешняя сила , и в результате увеличиваются углы увода середин мостов. При этом нарастание углов увода может повлечь за собой занос задних колес и потерю устойчивости автомобиля. Чем выше скорость движения автомобиля, тем больше центробежная сила и скорость ее нарастания, тем труднее предотвратить занос автомобиля своевременным поворотом передних колес в сторону заноса.
При компоновке автомобиля необходимо учитывать согласование кинематики рулевого привода и подвески управляемого моста.
Несоответствие кинематики подвески и рулевого привода вызывает изменение углов установки шкворней, колеи и плоскости вращения колес при деформации подвески, в результате чего нарушается устойчивость и ухудшается управляемость автомобиля.
Шаровой палец, закрепленный на поворотном рычаге управляемого моста, кинематически связан, с одной стороны, с центром качания рессоры, а с другой - с центром качания продольной рулевой тяги относительно шарового пальца рулевой сошки. Если эти центры не совпадают, не совпадают дуги ММ и NN, проведенные из этих центров (рисунок 11.3). Поэтому при деформациях рессор произойдет поворот передних колес. Сравнивая компоновку автомобиля с расположением рулевого механизма перед управляемым мостом (рисунок 11.3, а) с компоновкой, в которой рулевой механизм расположен за управляемым мостом (рисунок 11.3, б), видим, что компоновка с расположением рулевого механизма перед управляемым мостом обеспечивает меньшее несоответствие кинематики рулевого управления и подвески. Следовательно, при этой компоновке будет обеспечена лучшая устойчивость и управляемость автомобиля.
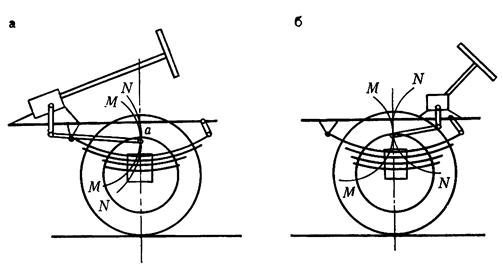
Рисунок 11.3. Компоновка относительного расположения рулевого механизма и
управляемого моста
В практике проектирования обычно допускается некоторый уровень несоответствия кинематики подвески и рулевого привода, который принимается из анализа аналогов автомобилей, имеющих хорошую устойчивость и управляемость.
Литература: 2[106-111]
Контрольные вопросы:
1) Как влияет параметры компоновки автомобиля на его проходимость?
2) Как влияет параметры компоновки автомобиля на его плавность хода?
3) Как влияет параметры компоновки автомобиля на его управляемость?
4) Как влияет параметры компоновки автомобиля на его устойчивость?
5) Как определяется коэффициент поворачиваемости?
Дата добавления: 2016-09-06; просмотров: 2523;
Поиск по сайту
Узнать еще
- Arthropoda. Клещи. Систематика. Морфология. Медицинское значение.
- Arthropoda. Паукообразные. Систематика. Географическое распространение. Морфология. Скорпионы. Пауки. Медицинское значение.
- Arthropoda..Систематика.Насекомые.Морфология.Классификация.Медицинское значение.
- Arthropoda.Систематика.Блохи.Виды блох.Географическое распространение.Морфология,развитие,патогенное действие.Медицинское и эпидемиологическое значение.Меры борьбы.
- Arthropoda.Систематика.Мошки,мокрецы,слепни,оводы.Географическое распространение.Морфология,развитие,патогенное действие.Медицинское значение,меры борьбы.
- Arthropoda.Систематика.Тараканы и мухи.Географическое распространение.Основные представители.Морфология,развитие,патогенное действие.Медицинское знаение.Меры борьбы.
- Cимпатическая нервная система. Центральный и периферический отдел симпатической нервной системы.
- D) Система класифікації за підтримкою багато гілкового виконання програми.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
