ГИДРОМЕХАНИЧЕСКАЯ ПЕРЕДАЧА
Гидромеханическая передача (ГМП) успешно применяется на автомобилях уже более полуве ка и дает возможность заметно облегчить управление автомобилем.
Применение гидромеханической передачи на автомобиле позволяет получить следую щие преимущества:
1. Обеспечение автоматизации переключения передач и отсутствие необходимости иметь пе даль сцепления.
2. Повышение проходимости автомобиля в условиях бездорожья за счет отсутствия разрыва потока мощности при переключении передач.
3. Повышение долговечности двигателя и агрегатов трансмиссии за счет способности гидро трансформатора снижать динамические нагрузки.
В то же время как недостаток необходимо отметить потерю мощности и повышение рас хода топлива за счет более низкого КПД ГМП по сравнению с автомобилем, имеющим меха ническую коробку передач.
Гидромеханическая передачавключает в себя три основные части:
— гидротрансформатор;
— механическую коробку передач;
— систему управления.
На автомобилях ГМП впервые появилась в США: в 1940 г. коробка Hydramatic была установлена на автомобилях Oldsmobile. Справедливости ради необходимо отметить, что еще с начала 1930-х гг. на английских автобусах использовалась гидромеханическая трансмиссия Wilson, которая не была автоматической, но облегчала работу водителя. В настоящее время в США ГМП снабжаются 90 % легковых автомобилей, а также все го родские автобусы и значительная часть грузовых автомобилей. В Европе массовое при менение ГМП началось только в начале семидесятых годов прошлого века, когда эти пе редачи нашли применение в автомобилях Mercedes-Benz, Opel, BMW. В это же время в Европе строятся специализированные заводы по производству ГМП: фирма Borg-Warner строит завод в Англии (г. Летифорд), Ford — в г. Бордо (Франция), GM — в Страсбурге (Франция). В Японии появляются сразу два специализированных производства — Jatco и Aisin-Warner.
Гидротрансформатор (рис. 3.34; 3.35) был изобретен немецким профессором Фет- тингером в 1905 г. Прежде чем найти приме нение на автомобилях, гидротрансформатор использовался на судах и тепловозах.
Простейший гидротрансформатор, вы полнен в виде камеры тороидальной фор мы и включает в себя три лопастных колеса: насосное,вал которого соединен с колен чатым валом двигателя; турбинное,со единенное с трансмиссией, и реактор,установленный в корпусе гидротрансфор матора (рис. 3.36).
Гидротрансформатор заполняется спе циальной жидкостью. Каждое колесо имеет наружный и внутренний торцы, между кото рыми располагаются профилированные ло пасти, образующие каналы для протока жидкости. Все колеса гидротрансформатора максимально приближены друг к другу, а вытеканию жидкости препятствует специ альное уплотнение.
При вращении коленчатого вала двигате ля вращается насосное колесо, которое перемещает жидкость, находящуюся между его лопастями. Жидкость не только вра щается относительно оси гидротрансфор матора, но и за счет воздействия на нее цен тробежных сил перемещается вдоль лопа стей насосного колеса по направлению от входа к выходу, что сопровождается увеличе нием кинетической энергии потока. На выхо де из насосного колеса поток жидкости попа дает на турбинное колесо, оказывая силовое воздействие на его лопасти. Затем поток по падает в реактор, пройдя который, возвра щается к входу в насосное колесо. Таким об
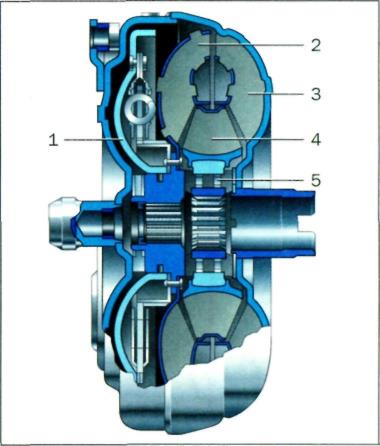
Рис. 3.34. Схема гидротрансформатора:1 — блокировочная муфта; 2 — турбинное колесо; 3 — насосное колесо; 4 — реактор ное колесо; 5 — механизм свободного хода

Рис. 3.35. Внешний вид гидротрансфор матора
разом, жидкость постоянно перемещается по замкнутому кругу циркуляции, образованному проточными частями всех трех лопастных колес, и находится с ними в силовом взаимодейст вии. При этом насос передает энергию двигателя потоку, а тот, в свою очередь, — турбине.
Если бы между насосным и турбинным колесами отсутствовал реактор, то такая конструк ция (гидромуфта) осуществляла бы перенос энергии от двигателя к трансмиссии гидравличе ским способом, без возможности изменения крутящего момента. Расположенный между ко лесами гидротрансформатора неподвижный реактор, имеет лопасти специального профиля, которые изменяют направление потока жидкости, выходящей из турбинного колеса и напра вляют его под определенным углом на лопасти насосного колеса. Это позволяет значитель но увеличить передаваемый от двигателя в трансмиссию крутящий момент.
Любой гидротрансформатор характеризуется определенным КПД, передаточным отно шением, которое показывает соотношение угловых скоростей его колес, и коэффициентом трансформации, показывающим, во сколько раз увеличивается значение крутящего момен-

Рис. 3.36. Детали гидротрансформатора:1 — насосное колесо; 2 — турбинное колесо; 3 — крышки муфты свободного хода; 4 — часть корпуса гидротрансформатора; 5 — остатки рабочей жидкости с продуктами механического износа деталей; 6 — колесо реактора; 7 — муфта свободного хода реактора; 8 — упорная шайба турбинного колеса; 9 — упорный под шипник реактора; 10 — поршень блокировки гидротрансформатора
та. Максимальный коэффициент трансформации зависит от конструкции гидротрансформа тора и может составлять до 2,4 (при неподвижном турбинном колесе). При увеличении час тоты вращения вала двигателя увеличивается угловая скорость насосного и турбинного ко лес, а увеличение крутящего момента в гидротрансформаторе плавно уменьшается. Когда угловая скорость турбинного колеса приближается к угловой скорости насосного, поток жид кости, поступающей на лопасти реактора, изменяет свое направление на противоположное. Для того чтобы реактор на этом режиме не создавал помех потоку жидкости, его устана вливают на муфте свободного хода, и он начинает свободно вращаться (гидротрансформа тор переходит на режим гидромуфты), что позволяет, в свою очередь, снизить потери. Такие
гидротрансформаторы называют комплексными.
КПД гидротрансформатора определяет экономичность его работы. Максимальное значе ние КПД гидротрансформатора может быть от 0,85 до 0,97, но обычно находится в диапазоне от 0,7 до 0,8. В комплексном гидротрансформаторе на режиме гидромуфты можно получить максимальное значение КПД — 0,97.
Изменение режимов работы гидротрансформатора происходит автоматически. Если уве личивать нагрузку на выходе из гидротрансформатора, то происходит уменьшение угловой скорости турбины, что приводит к увеличению коэффициента трансформации.
К сожалению, гидротрансформатор имеет малый диапазон передаточных чисел, не обес печивает движения задним ходом, не разобщает двигатель от трансмиссии (необходима сложная система опорожнения проточных частей от рабочей жидкости). Поэтому за гидро трансформатором устанавливают специальную коробку передач, которая компенсирует
указанные недостатки. Такая гидромехани ческая передача является бесступенчатой и позволяет получить любое передаточное число в заданном диапазоне.
В гидромеханических передачах в ос новном применяются механические плане тарные коробки передач, которые легко поддаются автоматизации, но иногда ис пользуют и обычные ступенчатые коробки передач с автоматическим управлением.
Простая планетарная передача состоит из центральной, «солнечной», шестерни и на ружной шестерни в виде кольца, с внутрен ними зубьями; эти две шестерни связаны между собой посредством нескольких (обычно трех) шестерен-сателлитов, смонти рованных на общей раме, которая называ ется водилом.
Для того чтобы планетарная передача изменяла крутящий момент, нужно обеспечить вращение одного из ее элементов («солнеч ной», коронной шестерни или водила), а один из элементов затормозить. В этом случае третий элемент будет вращаться с уг ловой скоростью, определяемой числом зубьев шестерен, входящих в планетарную передачу. Если одновременно затормозить два элемента, планетарная передача будет работать, как прямая с передаточным чис лом равным единице. Планетарная передача позволяет легко реверсировать вращение для получения заднего хода автомобиля. В то же время такие передачи достаточно компактны, обеспечивают возможность по лучения больших передаточных чисел и легко соединяются последовательно для получения большого числа ступеней. Для переключе ния передач достаточно просто затормажи вать валы отдельных элементов планетар ной коробки передач. Раньше в качестве тормозных устройств часто использовали ленточные тормоза, а в последнее время они практически вытеснены многодисковы ми «мокрыми» сцеплениями — фрикциона ми. Существуют и более сложные варианты планетарных передач.
Первые американские ГМП легковых ав томобилей имели двухступенчатую переда чу, причем низшая передача включалась вручную. Однако впоследствии одной авто-
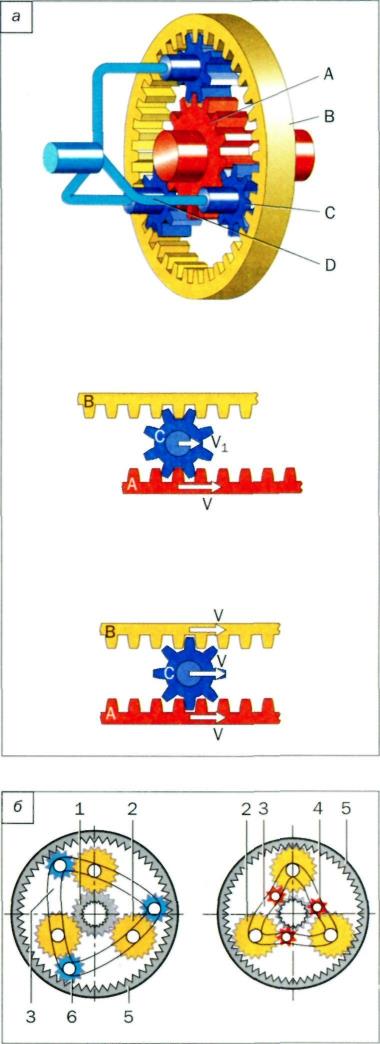
Рис. 3.37. Простая планетарная передача (а):А — солнечное колесо; В — эпицикл; С — сателлиты; D — водило; V — линейная скорость; и схема планетарной передачи (б):1 — солнечная шестерня; 2, 4, 6 — сателли ты; 3 — водило; 5 — коронная шестерня

Рис. 3.38. Варианты исполнения планетарных передач:1, 2, 3 — валы; 4 — водило; 5, 8,
9 — сателлиты; 6, 7 — коронное зубчатое колесо
матической передачи оказалось явно недостаточно и появились ГМП с двумя и тремя авто матическими передачами. Для повышения топливной экономичности, гидротрансформато ры стали делать блокирующимися — после разгона на высшей передаче насосное и турбин ное колеса жестко соединялись фрикционной муфтой. Затем в конце 1980-х гг. блокировку гидротрансформатора стали применять на всех передачах, кроме первой.
Система автоматического управления обычно состоит из следующих подсистем:
— функционирования (гидравлические насосы, регуляторы давления);
— измерительная, собирающая информацию о параметрах управления;
— управляющая, вырабатывающая управляющие сигналы;
— исполнительная, осуществляющая управление переключением передач, работой двигателя;
— подсистема ручного управления;
— подсистема автоматических защит, предотвращающая возникновение опасных ситуаций. Конец 80-х гг. ознаменовался повсеместным внедрением электроники. Она позво ляет гораздо точнее выдерживать заданные моменты переключения (с точностью до 1 % вместо прежних 6- 8 %). Появились дополнительные возможности: по характеру измене-
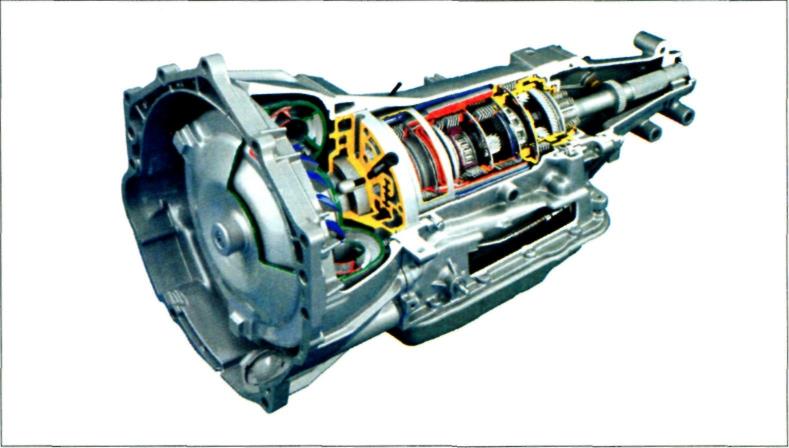
Рис. 3.39. Современная четырехступенчатая ГМП автомобиля классической компоновки
ния скорости при данной нагрузке на дви гатель компьютер может вычислить массу автомобиля и ввести соответствующие поправки в алгоритм переключения. Электронное управление предоставило неограниченные возможности для само диагностики, что позволило корректиро вать процессы управления в зависимости от многих параметров (от температуры и вязкости жидкости до степени износа фрикционных элементов).
Однако, как и прежде, многое зависит от выбора закона переключения и организации переходного процесса переключения пере дач, а также тщательного согласования их с характеристиками двигателя. Например,

Рис. 3.40. Гидромеханическая коробка передач 7G-Tronik — первая в миресе- миступенчатая автоматическая коробка (Mercedes-Benz)
многие автомобили BMW, Audi, Jaguar имеют одинаковые по конструктивным особенностям автоматические коробки передач одной и той же фирмы Zanradfabrik (ZF), но они работают со вершенно по-разному.
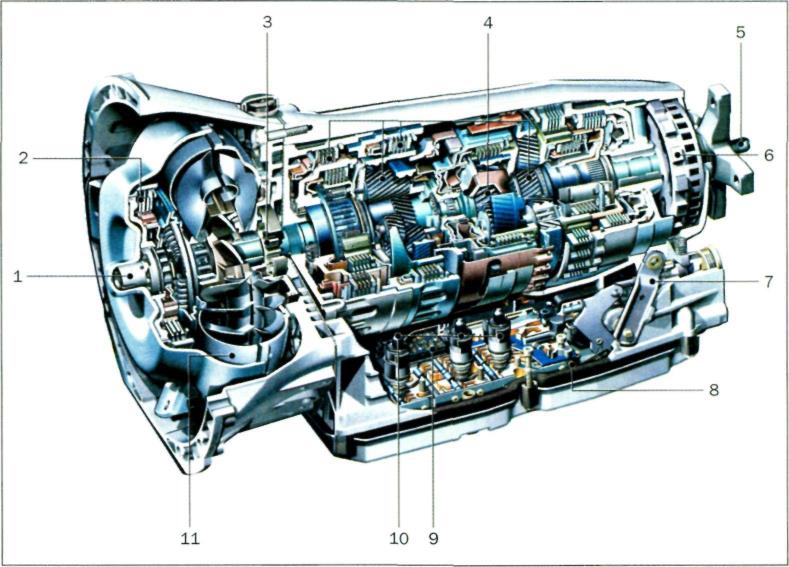
Рис. 3.41. Устройство коробки передач 7G-Tronik:1 — ведущий вал; 2 — фрикцион блоки ровки гидротрансформатора с гасителем крутильных колебаний; 3 — масляный насос с кон тролем давления; 4 — фрикционы и планетарные передачи; 5 — выходной вал; 6 — стояночный тормоз; 7 — селектор; 8 — электронный блок управления; клапаны и датчики, встроенные в поддон; 9 — электронный блок переключения передач; 10 — высокоскоростные соленои ды; 11 — гидротрансформатор
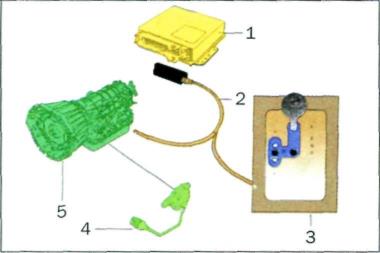
Рис. 3.42. Основные элементы электрон ной системы управления:1 — блок управ ления; 2 — соединительный кабель; 3 — ры чаг управления; 4 — электрический разъем; 5 — ГМП
С сентября 2003 г. на автомобили Mercedes-Benz класса Е, S, SL и CL устанав ливаются гидромеханические коробки пе редач 7G-Tronik (рис. 3.40). Эта семиступен- чатая автоматическая коробка передач при шла на смену пятиступенчатому варианту ГМП. Новая ГМП позволила снизить расход топлива в среднем на 5 % в зависимости от модели автомобиля. Переключение пере дач происходит быстрее и более плавно.
Переключение передач осуществляется тремя многодисковыми тормозами, на кото рые оказывают воздействие гидравличе ские цилиндры. Давление в системе управ ления создает гидронасос с приводом от двигателя через насосное колесо гидро трансформатора. В нижнюю часть коробки
устанавливается гидравлическое исполнительное золотниковое устройство, которое с помо щью электромагнитных клапанов и по команде блока управления соединяет гидронасос с гидравлическими элементами сцепления и тормозов.
Основными элементами электронной системы управления являются электронный блок и рычаг управления. В правом секторе рычаг может занимать четыре позиции:
Р — режим парковки; R — задний ход;
N — нейтральная передача;
D — движение в режиме автоматического переключения передач.
При положении рычага в позиции D программа обеспечивает различные алгоритмы пе реключения в соответствии с сопротивлением движения, нагрузкой, положением педали
«газа», дорожной ситуацией.
Алгоритмы управления соответствуют движению в различных условиях:
— движение с постоянной высокой скоростью;
— городской режим движения;
— горный режим движения;
— режим буксировки;
— движение на поворотах.
При перемещении рычага влево водитель переводит коробку передач в режим ручного пе реключения. Движением рычага вперед-назад — включение повышающей-понижающей пе редачи. Такое переключение передач принято называть секвентальным (последовательным). Электронный блок управления является адаптивным, он запоминает манеру вождения водите ля и корректирует алгоритмы автоматического переключения передач.
Дата добавления: 2016-09-06; просмотров: 4163;
Поиск по сайту
Узнать еще
- FTP — передача файлов
- Безусловная передача управления
- Вертикальная передача
- Вибрация вала со шкивами (звездочками) в ременных (цепных) передачах
- Вопрос 1. Назначение и требования к рычажным передачам.
- ВОПРОС 45. КЛИНОРЕМЕННАЯ ПЕРЕДАЧА. ПРЕИМУЩЕСТВА ПЕРЕД ПЛОСКОРЕМЕННОЙ ПЕРЕДАЧЕЙ. ОПРЕДЕЛЕНИЕ СИЛ ТРЕНИЯ.
- Встановлення порядків здійснення державного контролю за міжнародними передачами товарів
- Выравнивание температур. Внешняя теплопередача

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
