Реализация регулятора
Рассмотрим возможность реализации регулятора, рассчитанного модальным методом. Реализовать корректор статики с передаточной функцией  , представляющей собой обычный интегратор, не вызывает затруднений. Остановимся подробнее на реализации звена обратной связи с передаточной функцией
, представляющей собой обычный интегратор, не вызывает затруднений. Остановимся подробнее на реализации звена обратной связи с передаточной функцией  .
.
Поскольку для реальных объектов управления степень полинома числителя передаточной функции  обычно меньше степени полинома ее знаменателя (
обычно меньше степени полинома ее знаменателя (  ), корректор динамики
), корректор динамики
 ,
,
как правило, имеет форсирующий характер. Это означает, что необходимо реализовать дифференцирующие звенья, которые усиливают влияние высокочастотной помехи.
 |
С целью уменьшения этого влияния предлагается использовать специальный фильтр, который подключается параллельно объекту и состоит из модели
 (с выходом
(с выходом  ) и стабилизирующей добавки
) и стабилизирующей добавки  (рис. 6.19). Его называют фильтром Калмана – Бьюсси или параллельным фильтром.
(рис. 6.19). Его называют фильтром Калмана – Бьюсси или параллельным фильтром.
Здесь передаточная функция параллельной модели
 . Стабилизирующая добавка «сводит» к нулю разницу между выходом объекта у и выходом модели .
. Стабилизирующая добавка «сводит» к нулю разницу между выходом объекта у и выходом модели .
Исследуем свойства фильтра, записав выражение для ошибки
 ,
,
которое после преобразований принимает вид
 .
.
Характеристическое уравнение фильтра следующее:
 . (6.59)
. (6.59)
В случае, когда его корни имеют отрицательную вещественную часть, ошибка  при
при  . Таким образом, начиная с некоторого момента времени выход модели будет повторять выход объекта у как угодно точно.
. Таким образом, начиная с некоторого момента времени выход модели будет повторять выход объекта у как угодно точно.
С помощью стабилизирующей добавки L(р) можно получить устойчивые процессы в фильтре и для неустойчивого объекта.
Выбирая соответствующим образом , можно ускорить процесс оценки выходной переменной объекта.
Использование параллельного фильтра позволяет получить схему реализации корректора динамики, изображенную на
рис. 6.20. Эту схему можно упростить, если представить передаточную функцию модели в виде произведения
 |
 . (6.60)
. (6.60)
После несложных структурных преобразований получим
окончательно структурную схему реализации замкнутой системы
(рис. 6.21).
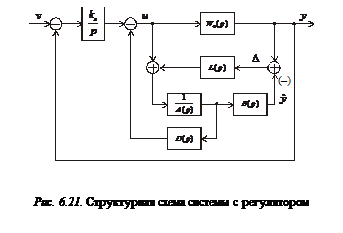 |
Передаточные функции фильтра и регулятора могут быть реализованы на активных элементах после их представления в виде цепочки интеграторов с прямыми и обратными связями согласно первой канонической форме (см. подразд. 6.1).
6.5.6. Процедура синтеза регулятора
модальным методом
На основе рассмотренной операторной методики модального метода синтеза можно предложить следующую процедуру расчета регулятора.
1. Проверяются условия разрешимости задачи синтеза для исходного объекта управления.
2. Записывается передаточная функция корректора статики  .
.
3. Выбирается передаточная функция корректора динамики  , где
, где  – полином числителя передаточной функции объекта; n – порядок объекта;
– полином числителя передаточной функции объекта; n – порядок объекта;  ,
,  – коэффициенты регулятора, численные значения которых должны быть определены в процессе синтеза
– коэффициенты регулятора, численные значения которых должны быть определены в процессе синтеза  .
.
4. В соответствии с расчетной структурной схемой (см. рис. 6.13) находится действительное характеристическое уравнение системы, содержащее неизвестные параметры регулятора (6.52).
5. С учетом требований к качеству переходных процессов (  и
и  ) формируется желаемое характеристическое уравнение системы (
) формируется желаемое характеристическое уравнение системы (  )-го порядка в виде (6.56).
)-го порядка в виде (6.56).
6. Приравниваются коэффициенты при соответствующих степенях оператора p желаемого (6.56) и действительного (6.52) характеристических уравнений системы, записываются расчетные соотношения для параметров регулятора (6.57).
7. В случае, когда степени полиномов числителя и знаменателя передаточной функции объекта связаны соотношением  , передаточная функция корректора динамики содержит в числителе и знаменателе полиномы одного порядка. Такой регулятор может быть непосредственно реализован в виде цепочки интеграторов с прямыми и обратными связями (п. 3.6.1).
, передаточная функция корректора динамики содержит в числителе и знаменателе полиномы одного порядка. Такой регулятор может быть непосредственно реализован в виде цепочки интеграторов с прямыми и обратными связями (п. 3.6.1).
8. В ситуации, когда  , корректор динамики представляет собой форсирующее звено, для его реализации в систему следует вводить специальный фильтр (см. рис. 6.16).
, корректор динамики представляет собой форсирующее звено, для его реализации в систему следует вводить специальный фильтр (см. рис. 6.16).
9. При расчете стабилизирующей добавки используется методика модального метода синтеза. Сначала формируется желаемое характеристическое уравнение фильтра так, чтобы процессы в нем заканчивались на порядок быстрее, чем в системе (т. е.  ). Приравниваются коэффициенты при соответствующих степенях оператора p полученного желаемого и действительного (6.59) характеристических уравнений фильтра, записываются соотношения для расчета параметров стабилизирующей добавки.
). Приравниваются коэффициенты при соответствующих степенях оператора p полученного желаемого и действительного (6.59) характеристических уравнений фильтра, записываются соотношения для расчета параметров стабилизирующей добавки.
10. Параллельная модель и стабилизирующая добавка реализуются в виде цепочки интеграторов, из внутренних переменных модели формируется форсирующий регулятор.
Пример 6.9
Предложить схемную реализацию регулятора, рассчитанного для объекта с передаточной функцией
из примера 6.8.
Найденные из условия требуемого качества процессов в замкнутой системе передаточные функции регулятора имеют вид

 ,
,
где 
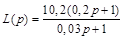
Как видим, корректор динамики представляет собой форсирующее звено первого порядка, поэтому для его реализации введем в систему стабилизирующую добавку с передаточной функцией
 .
.
С учетом передаточной функции модели объекта
запишем действительное характеристическое уравнение фильтра (6.59) в виде

или
 .
.
Представим это уравнение в стандартной форме

Сформируем желаемое характеристическое уравнение фильтра так, чтобы процессы в нем заканчивались на порядок быстрее, чем в системе. При этом выберем 
Поскольку в системе не допускается перерегулирование, сохраним это условие и для фильтра. Таким образом, корни должны быть вещественными и располагаться на расстоянии не ближе  от мнимой оси. В результате выберем следующие корни:
от мнимой оси. В результате выберем следующие корни:

Запишем желаемое характеристическое уравнение фильтра

В результате подстановки численных значений корней получим

Определим расчетные соотношения для параметров стабилизирующей добавки, для чего приравняем коэффициенты уравнений  и
и  :
:
Отсюда найдем  .
.
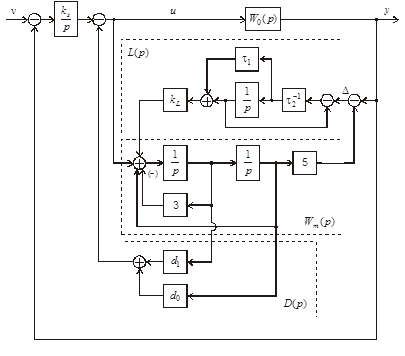 Рис. 6.22. Структурная схема системы для примера 6.9
Рис. 6.22. Структурная схема системы для примера 6.9
Таким образом, передаточная функция стабилизирующей добавки имеет вид
 .
.
В соответствии с рекомендациями п. 3.6.1 и структурной схемой, представленной на рис. 6.21, приведем на рис. 6.22 полную структурную схему системы с учетом реализации регулятора. На схеме пунктиром выделены:  – параллельная модель;
– параллельная модель;  – стабилизирующая добавка;
– стабилизирующая добавка;  – полином числителя корректора динамики.
– полином числителя корректора динамики.
Литература
1. Андреев Ю.Н. Управление конечномерными линейными объектами. – М.: Наука, 1978.
2. Бесекерский В.А., Попов Е.П. Теория автоматического регулирования. – М.: Наука, 1974.
3. Воронов А.А. Устойчивость, управляемость, наблюдаемость. – М.: Наука, 1979.
4. Деруссо П.М. и др. Пространство состояний в теории управле-
ния. – М.: Наука, 1970.
5. Ерофеев А. А. Теория автоматического управления. – СПб.: Политехника, 1998.
6. Иващенко Н.Н. Автоматическое регулирование. – М.: Машино-строение, 1978.
7. Коновалов Г.Ф. Радиоавтоматика. – М.: Высш. шк., 1990.
8. Кузовков Н.Т. Модальное управление и наблюдающие устрой-
ства. – М.: Машиностроение, 1976.
9. Первозванский А.А. Курс теории автоматического управления. – М.: Высш. шк., 1986.
10. Попов Е.П. Теория линейных систем автоматического регулирования и управления. – М.: Высш. шк., 1989.
11. Теория автоматического управления. В 2 ч. / Под ред. А.А. Воронова. –М.: Высш. шк., 1986.
12. Теория автоматического управления / Под ред. А.В. Нетушила. – М.: Высш. шк., 1976.
13. Теория автоматического управления / Под ред. А.С. Шаталова. – М.: Высш. шк., 1977.
14. Топчеев Ю.И. Атлас для проектирования систем автоматического регулирования. – М.: Машиностроение, 1989.
15. Филипс Ч., Харбор Р. Системы управления с обратной связью. – М.: Лаборатория базовых знаний, 2001.
Дата добавления: 2020-10-25; просмотров: 311;
Поиск по сайту
Узнать еще
- Автоматизированный расчет настроечных коэффициентов регулятора средствами SIMULINK
- Автоматическими регуляторами возбуждения (АРВ)
- Анализ использования и реализация сельскохозяйственной продукции.
- Аналоговая реализация произвольных передаточных функций
- Аппаратная реализация системы горячего резервирования Диагностика системы горячего резервирования
- Аппаратная реализация способов передачи данных
- Аппаратная реализация СУ.
- Аппаратная реализация СУ.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
