Определение передаточной функции
Регулятора
Асимптотическую ЛАЧХ регулятора определим графически в соответствии с основным соотношением частотного метода синтеза (6.34) в виде

По найденной характеристике определим частоты сопряжения, где происходит излом  , и соответствующие им значения постоянных времени. Передаточная функция
, и соответствующие им значения постоянных времени. Передаточная функция  определяется на основе процедуры, обратной по отношению к правилу построения ЛАЧХ объекта. Причем в окончательную передаточную функцию регулятора следует добавить коэффициент усиления
определяется на основе процедуры, обратной по отношению к правилу построения ЛАЧХ объекта. Причем в окончательную передаточную функцию регулятора следует добавить коэффициент усиления  , рассчитанный по условиям статики, т. е.
, рассчитанный по условиям статики, т. е.  .
.
Реализовать полученную передаточную функцию можно на пассивных или активных элементах. В последнем случае удобно воспользоваться рекомендациями подразд. 3.6 по переходу от передаточной функции к структурным схемам, соответствующим каноническому представлению. Отметим, что в этом методе синтеза для реализации регулятора можно использовать любой из вариантов структурных схем.
Пример 6.6
Для системы, приведенной на рис. 6.8, с передаточной функцией объекта
и построенной по заданным требованиям к динамике и статике логарифмической характеристикой  (рис. 6.11) необходимо определить передаточную функцию регулятора.
(рис. 6.11) необходимо определить передаточную функцию регулятора.
Предварительно графически найдем  как разность между желаемой характеристикой
как разность между желаемой характеристикой  системы и ЛАЧХ объекта
системы и ЛАЧХ объекта  . Определим частоты сопряжения
. Определим частоты сопряжения  , которые соответствуют точкам излома характеристики корректирующего звена . Используя правило п. 6.4.3, запишем передаточную функцию регулятора в виде
, которые соответствуют точкам излома характеристики корректирующего звена . Используя правило п. 6.4.3, запишем передаточную функцию регулятора в виде
 ,
,
где  .
.
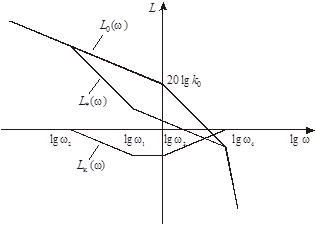
Рис. 6.11. Иллюстрация частотного метода синтеза
Схематично полученную передаточную функцию можно представить в виде цепочки последовательно соединенных интеграторов с прямыми и обратными связями, используя приемы, описанные в подразд. 3.6. Такое представление позволяет легко перейти к реализации корректирующего звена на активных элементах.
6.4.7. Влияние возмущения и помехи измерения
на свойства замкнутой системы
Обсудим теперь влияние возмущения и помехозащищенность системы (рис. 6.12), рассчитанной частотным методом, для чего вернемся к ее исходной структуре (см. рис. 6.8).
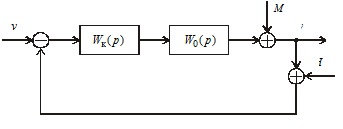
Рис. 6.12. Расчетная структурная схема системы для частотного
метода синтеза
Рассмотрим сначала случай, когда помеха измерения пренебрежимо мала (  ). Запишем выражение для выходной переменной системы
). Запишем выражение для выходной переменной системы
 . (6.39)
. (6.39)
В соответствии с постановкой задачи синтеза необходимо, чтобы выходная переменная y повторяла входной сигнал v независимо от влияния возмущения M. Обсудим, как система справляется с этой задачей, для чего исследуем ее поведение на различных частотах.
В области низких частот в соответствии с (6.30) справедливо условие  поэтому вторая составляющая выражения (6.39) при замене p на
поэтому вторая составляющая выражения (6.39) при замене p на  обращается в нуль, а
обращается в нуль, а  . Таким образом, система на низких частотах достаточно хорошо выполняет свою функцию.
. Таким образом, система на низких частотах достаточно хорошо выполняет свою функцию.
Вблизи частоты среза (в области средних частот) согласно (6.32) справедливо соотношение  а составляющие выхода следующие:
а составляющие выхода следующие:  и
и  Очевидно, что в такой ситуации система плохо воспроизводит вход и плохо подавляет возмущение, т. е. работает «частично».
Очевидно, что в такой ситуации система плохо воспроизводит вход и плохо подавляет возмущение, т. е. работает «частично».
В области высоких частот для частотных характеристик справедливо соотношение (6.31), поэтому вместо выражения (6.39) получим  и
и  . Как видим, в этом случае система не справляется с поставленной задачей.
. Как видим, в этом случае система не справляется с поставленной задачей.
Следовательно, чем шире полоса пропускания (чем больше  ), тем лучше в условиях действия возмущений система выполняет свое назначение. При построении желаемой логарифмической характеристики разомкнутой системы необходимо учитывать этот факт и стремиться по возможности увеличивать .
), тем лучше в условиях действия возмущений система выполняет свое назначение. При построении желаемой логарифмической характеристики разомкнутой системы необходимо учитывать этот факт и стремиться по возможности увеличивать .
Обсудим теперь влияние помехи h, полагая входное воздействие v и возмущение М равными нулю. Поскольку объект, как правило, имеет ограниченную полосу пропускания и в этом случае выступает в роли фильтра, то высокочастотная помеха не будет проходить на выход системы. В основном помеха оказывает влияние на управляющее воздействие, для которого операторное выражение имеет вид
 . (6.40)
. (6.40)
Рассмотрим соответствующую частотную характеристику и запишем приближенные выражения для управления (6.40) на различных частотах.
В области низких частот, когда получим

Как видим, влияние помехи будет тем меньше, чем больше коэффициент усиления объекта.
Для области средних частот справедливо условие  при этом
при этом

т. е. влияние помехи повышается по сравнению с предыдущим случаем.
В области высоких частот при выполнении соотношения (6.31) составляющую управления, порожденную помехой, приближенно можно оценить следующим образом:
 .
.
Таким образом, в этом случае влияние помехи полностью определяется свойствами корректирующего звена.
Следовательно, для уменьшения влияния помехи на низких и средних частотах нужно применять «качественный» датчик, а на высоких частотах  можно парировать путем использования регулятора, обладающего интегрирующими свойствами. Подобный эффект будет наблюдаться, если степень полинома числителя передаточной функции
можно парировать путем использования регулятора, обладающего интегрирующими свойствами. Подобный эффект будет наблюдаться, если степень полинома числителя передаточной функции  меньше степени полинома ее знаменателя. В случае, когда степени полиномов
меньше степени полинома ее знаменателя. В случае, когда степени полиномов  и
и  равны, в регулятор рекомендуется добавить апериодическое звено с малой постоянной времени.
равны, в регулятор рекомендуется добавить апериодическое звено с малой постоянной времени.
6.4.8. Процедура синтеза регулятора
частотным методом
Обобщая рассмотренные этапы частотного метода синтеза, можно предложить следующую процедуру расчета регулятора.
1. Определяется коэффициент усиления разомкнутой системы  из условия заданной статической ошибки
из условия заданной статической ошибки  по соотношению (6.36), а затем вычисляется коэффициент усиления регулятора (корректирующего звена) .
по соотношению (6.36), а затем вычисляется коэффициент усиления регулятора (корректирующего звена) .
2. Строится асимптотическая логарифмическая амплитудная частотная характеристика объекта с учетом рассчитанного коэффициента усиления регулятора  , т. е.
, т. е.  .
.
3. На основании требований к качеству процессов в замкнутой системе (  и
и  ) формируется желаемая ЛАЧХ разомкнутой системы
) формируется желаемая ЛАЧХ разомкнутой системы  .
.
4. Графически вычисляется логарифмическая амплитудная частотная характеристика регулятора согласно соотношению 
5. В соответствии с правилом п. 6.4.3 на основе восстанавливается передаточная функция , а затем записывается передаточная функция регулятора  .
.
6. Анализируется влияние возмущения M(t) и в случае необходимости увеличивается частота среза  , для которой повторяются пп. 3–5 процедуры расчета регулятора.
, для которой повторяются пп. 3–5 процедуры расчета регулятора.
7. С целью уменьшения влияния помехи измерения к рассчитанной передаточной функции корректирующего звена добавляется передаточная функция апериодического звена с малой постоянной времени.
8. Предлагается схемная реализация регулятора на активных или пассивных элементах.
Пример 6.7
Для следящей системы управления одним из звеньев руки робота из примера 5.2 (рис. 6.13) рассчитать регулятор, который обеспечивал бы следующее качество процессов: время установления  , перерегулирование
, перерегулирование  , скоростная ошибка
, скоростная ошибка  .
.
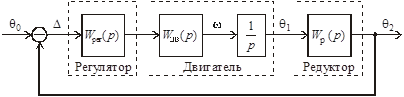
Рис. 6.13. Структурная схема системы управления одним
из звеньев руки робота
Здесь  и
и  – передаточные функции двигателя и редуктора;
– передаточные функции двигателя и редуктора;  – передаточная функция регулятора, который включает в себя корректирующее звено
– передаточная функция регулятора, который включает в себя корректирующее звено  и усилитель мощности с передаточной функцией
и усилитель мощности с передаточной функцией  .
.
При расчете коэффициент усиления усилителя мощности  добавим к передаточной функции объекта, т. е. будем рас-сматривать
добавим к передаточной функции объекта, т. е. будем рас-сматривать  .
.
В соответствии с процедурой синтеза определим коэффициент усиления корректирующего звена из условия заданной скоростной ошибки (см. пример 5.2),
 .
.
С учетом численных значений получим  и
и  . Выберем отсюда
. Выберем отсюда  .
.
Для построения асимптотической ЛАЧХ  запишем
запишем  в виде
в виде

и определим следующие характерные точки:  =33 дБ;
=33 дБ;  В логарифмическом масштабе
В логарифмическом масштабе  0,7 дек. Асимптотическая ЛАЧХ приведена на рис. 6.14.
0,7 дек. Асимптотическая ЛАЧХ приведена на рис. 6.14.
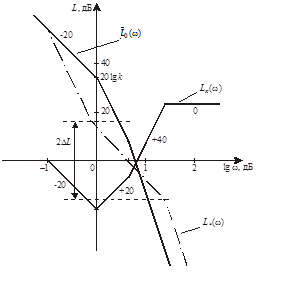
Рис. 6.14. Логарифмические амплитудно-частотные
характеристики к примеру 6.7
Построим теперь желаемую ЛАЧХ, среднечастотный участок которой имеет наклон –20 дБ/дек. Исходя из заданного перерегулирования  , по номограммам [2] (рис. 6.15) определим
, по номограммам [2] (рис. 6.15) определим  и
и  . Частоту среза обычно находят по соотношению
. Частоту среза обычно находят по соотношению  , поэтому выберем
, поэтому выберем  .
.
В этом случае  дек. Запас устойчивости по модулю, ограничивающий среднечастотный участок ЛАЧХ, также определим по номограмме,
дек. Запас устойчивости по модулю, ограничивающий среднечастотный участок ЛАЧХ, также определим по номограмме,  . В результате получим , которая приведена на рис. 6.14.
. В результате получим , которая приведена на рис. 6.14.

Рис. 6.15. Номограммы для определения параметров желаемой ЛАЧХ
Определим теперь  и запишем
и запишем
 ,
,
где 


 . Отсюда следует, что
. Отсюда следует, что 


 . Окончательно запишем
. Окончательно запишем

или
 .
.
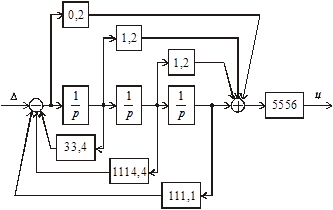
Рис. 6.16. Пример схемной реализации регулятора
Схемная реализация полученной передаточной функции корректирующего звена, соответствующая второму каноническому представлению (см. п. 3.6.2), приведена на рис. 6.16.
Дата добавления: 2020-10-25; просмотров: 361;
Поиск по сайту
Узнать еще
- F06 Другие психические расстройства вследствие повреждения или дисфункции головного мозга, либо вследствие физической болезни
- I. 2. Функции крови
- I. 3. Функции минеральных веществ плазмы крови
- I. 4. Функции белков плазмы крови
- I. Кейнсианские функции потребления и сбережений.
- I. Определение и структура методов обучения.
- I. Определение условий выполнения рукописи.
- I. Определение, виды радиоактивности, радиоактивные семейства

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
