Принцип работы и свойства нелинейной системы ЧАП
Структурная схема ЧАП с преобразованием частоты приведена на рис. 3.3 и описана в линейном режиме в п. 3.2. Построим структурную схему ЧАП (рис. 8.3) с учетом нелинейности характеристики дискриминатора F(Ω) (см. рис. 3.4).


В анализе примем, что нестабильностью частоты ГУН можно пренебречь. Примем, что  ;
;  ; W – отклонение частоты на выходе ЧАП (частота ГУН, промежуточная частота) в установившемся режиме от номинального значения (остаточная расстройка).
; W – отклонение частоты на выходе ЧАП (частота ГУН, промежуточная частота) в установившемся режиме от номинального значения (остаточная расстройка).
Составим уравнение работы ЧАП относительно отклонения частоты.
 . (8.2)
. (8.2)
 . (8.3)
. (8.3)
Будем считать, что ЧАП работает в режиме стабилизации частоты (сигналом воздействия является частота эталонного генератора wэт).
 . (8.4)
. (8.4)
Решим уравнение (8.4) для стационарного режима (t ® ¥ или p ® 0). В этом случае  и уравнение сводится к виду
и уравнение сводится к виду
 . (8.5)
. (8.5)
 Для наглядности решим уравнение (8.5) графически.
Для наглядности решим уравнение (8.5) графически.
Правая часть (8.5) представляет собой уравнение прямой относительно переменной W.
Решением будут являться точки пересечения (точки 1, 2, 3 на рис. 8.4) этой прямой и графика дискриминационной характеристики F(Ω).
Полученные решения Ω1, Ω2, Ω3 для общего случая (сплошная прямая a на рис. 8.4) необходимо проанализировать на локальную устойчивость.
 Есть несколько способов. Воспользуемся простейшим [2]: линеаризацией характеристики в области каждой точки решения
Есть несколько способов. Воспользуемся простейшим [2]: линеаризацией характеристики в области каждой точки решения
(  ):
):
 . (8.6)
. (8.6)
Подстановка (8.6) в (8.4) после замены переменных дает  :
:
 . (8.7)
. (8.7)
Решение (8.7) и анализ устойчивости [2] приводят к следующим условиям устойчивости решений:
 . (8.8)
. (8.8)
В точке 1 крутизна характеристики Sд1 > 0 и условие устойчивости (8.8) выполняется. В точке 2 Sд2 < 0 и  – условие (8.8) не выполняется и система неустойчива. В точке 3 Sд3 < 0, но
– условие (8.8) не выполняется и система неустойчива. В точке 3 Sд3 < 0, но  , поэтому условие (8.8) выполняется и система устойчива.
, поэтому условие (8.8) выполняется и система устойчива.
Система не может находиться в точке 2, она должна перейти в устойчивое состояние – точку 1 или 3.
В зависимости от начальной расстройки Δωc (возможные изменения показаны стрелочками на рис. 8.4) уравнение (8.5) может иметь одно или два решения.
Двум решениям на рис. 8.4 соответствуют штриховые линии b и c. Штриховая линия b позволяет определить по точке пересечения с осью абсцисс полосу захвата (при этом точки 1 и 2 сливаются), а штриховая линия c – полосу удержания (при этом сливаются точки 2 и 3) [24].
Рабочая полоса ЧАП – полоса захвата (точки 1 на рис. 8.4).
Полоса удержания не может быть меньше, чем полоса захвата.
Одному решению, которое получается при нахождении начальной расстройки в полосе захвата, на рис. 8.4 соответствует штрихпунктирная линия d [24].
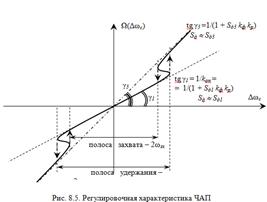
Зависимость остаточной расстройки Ω от начальной Δωс называется регулировочной характеристикой и является наиболее информативной характеристикой ЧАП (рис. 8.5) (kап = 1 + Sд kф kр).
Система ЧАП является статической РАС с конечной ошибкой  (kап = 1 + Sд kф kр – коэффициент автоподстройки).
(kап = 1 + Sд kф kр – коэффициент автоподстройки).
Пусть при включении ЧАП находится в асинхронном режиме, в этом случае начальная расстройка Δωс находится вне полосы удержания (Δωс > ωуд ), частота ГУН равна некоторой собственной частоте (частота при разомкнутой петле ОС). При медленном изменении частоты эталонного генератора в сторону уменьшения рассогласования частот, как только расстройка Δωс окажется в полосе захвата (Δωс < ωзх ), ЧАП войдет в режим слежения (синхронизм, рабочий режим) за частотой сигнала (в режиме стабилизации – за частотой эталонного генератора). При этом частота ГУН меняется скачком и ее отличие от ωэ уменьшается в kап раз, в результате частота ГУН почти равна частоте эталонного генератора.
Если теперь начать увеличивать расстройку Δωс , ЧАП будет работать в синхронном режиме до тех пор, пока значение расстройки будет оставаться внутри полосы удержания (Δωс < ωуд ). Чтобы вывести ЧАП из синхронного режима, потребуется увеличить расстройку так, чтобы она оказалась вне полосы удержания (Δωс > ωуд ).
Если при включении ЧАП начальная расстройка окажется в полосе захвата (Δωс < ωзх ), то система сразу входит в синхронизм.
Если при включении ЧАП начальная расстройка будет лежать в интервале между полосой захвата и удержания ( ωзх < Δωс< ωуд ), то достоверно поведение предсказать нельзя, так как система перейдет в одно из рассмотренных ранее устойчивых состояний.
Максимальная корректирующая расстройка Δωk max , вырабатываемая системой ЧАП, соответствует точке (1 = 2) на рис. 8.4 и равна
Δωk max = kрSдUд max, (8.9)
где Uд max – максимальное напряжение на выходе дискриминатора.
Соотношение между полосой захвата и удержания оценивается следующими формулами:
 ;
;  ;
;  . (8.10)
. (8.10)
Точность системы прямо пропорциональна kап , поэтому для уменьшения установившейся ошибки kап следует увеличивать. Однако при этом, как следует из формул (8.10), уменьшается полоса захвата, а значит, уменьшается рабочий диапазон частот эффективной автоподстройки. Таким образом, в статической ЧАП есть противоречие между точностью и полосой эффективной автоподстройки. Для разрешения данного противоречия используют астатическую ЧАП.
 В переходном режиме поведение ошибки будет зависеть в основном от характеристики фильтра. Для данного случая , поэтому
В переходном режиме поведение ошибки будет зависеть в основном от характеристики фильтра. Для данного случая , поэтому  , и остаточная расстройка будет изменяться не скачком, а плавно с некоторой задержкой.
, и остаточная расстройка будет изменяться не скачком, а плавно с некоторой задержкой.
На рис. 8.6 приведена ПХ для этого случая.
Время регулирования оценивается формулой  .
.
Применение системы ЧАП в РПрмУ по сравнению с ФАПЧ имеет достоинство: ЧАП не реагирует на «зеркальную помеху».
Дата добавления: 2020-10-25; просмотров: 788;
Поиск по сайту
Узнать еще
- ОСНОВНЫЕ ТИПЫ И СВОЙСТВА НАПОЛЬНЫХ И БОРТОВЫХ СИСТЕМ ТЕХНИЧЕСКОГО ДИАГНОСТИРОВАНИЯ
- Cпецифика логопедической работы в остром периоде
- F45.38 другие органы или системы
- H. Разработка мер по повышению качества работы органа здравоохранения
- I. История возникновения и развития классно-урочной системы.
- I. Понятие о принципах обучения, их взаимосвязь.
- I. Развитие Донбасса в условиях кризиса феодально-крепостнической системы
- I. Создание системы управленческого учета.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
