Корректирующие звенья непрерывных систем: назначения способы включения, взаимозаменяемость
Назначение корректирующих звеньев – придание системе необхо-димых динамических свойств (повышение точности регулирования, по-вышение запаса устойчивости, повышение быстродействия и т. п.).
В РАС в качестве корректирующих звеньев используются пассивные и активные электрические цепи.
Корректирующие устройства подразделяются следующим образом:
‒ линейные и нелинейные,
‒ пассивные и активные,
‒ с коррекцией по постоянному и переменному напряжениям.
По виду включения в РАС корректирующие устройства делят на следующие:
‒ последовательные,
‒ параллельные,
‒ с местной обратной связью,
‒ с комбинированным управлением.
Последовательное включение корректирующего звена КК (рис. 7.2).
Обычно так включают корректирующие звенья интегрирующего типа. Введение интегрирующего звена в данном случае повышает точность.

Параллельное включение корректирующего звена (рис. 7.3).
Обычно при таком включении используют дифференцирующие зве-нья. Как известно, такие звенья вызывают подъем высоких частот. При-менение подобных звеньев позволяет повысить запас устойчивости в об-ласти ОВЧ.
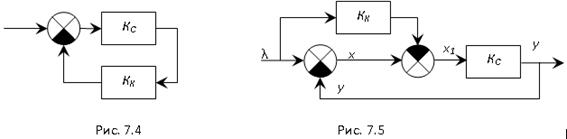
Включение корректирующего звена с местной обратной связью по-казано на рис. 7.4, а на рис. 7.5 – включение звена с комбинированным управлением.
Различают такие виды местной обратной связи:
‒ жесткая обратная связь: КК = kос;
‒ инерционная жесткая обратная связь:  ;
;
‒ гибкая обратная связь: КК = kосp;
‒ инерционная гибкая обратная связь: 
.
Рассмотрим влияние жесткой обратной связи (КК = kос) на инер-ционное (W(p) = k0/(1 + pT0)) и интегрирующее (W(p) = k0/p) звенья [4].
K(p) = k0/(1 + k0kос + pT0), kэкв = k0/(1 + k0kос), Tэкв = T0/(1 + k0kос). (7.6)
Таким образом, охват инерционного звена жесткой обратной связью не изменяет его характера (K(p) = kэкв/(1 + pTэкв)), но при этом коэффициент усиления и постоянная времени звена уменьшаются в (1 + k0kос) раз.
При охвате интегрирующего звена жесткой обратной связью изме-няется тип звена: получается инерционное звено с ПФ
K(p) = kэкв/(1 + pTэкв).
K(p) = k0/(k0kос + p) =  , kэкв = 1/kос, Tэкв = 1/(k0kос). (7.7)
, kэкв = 1/kос, Tэкв = 1/(k0kос). (7.7)
Гибкая обратная связь содержит дифференцирующие звенья и дей-ствует только в переходном режиме. В результате точность РАС в установившемся режиме не изменяется [4].
Рассмотрим влияние гибкой инерционной обратной связи
(  ) на безынерционное (W(p) = k0) и интегрирующее (W(p) = k0 /p) звенья.
) на безынерционное (W(p) = k0) и интегрирующее (W(p) = k0 /p) звенья.
Для безынерционного звена получаем 
, (7.8)
что эквивалентно включению в РАС последовательного звена с отста-ванием по фазе.
Для интегрирующего звена (W(p) = k0/p) получаем 

, (7.9)
где kэкв = k0/(1 + k0Тос), Тэкв= Тос/(1 + k0Тос), что эквивалентно включению в РАС последовательного звена с опережением по фазе [4].
Звенья с комбинированным управлением (рис. 7.5) могут придать РАС особые свойства. Например, при  РАС становится невосприимчивой к ошибке. В результате можно повысить точность РАС без ухудшения устойчивости.
РАС становится невосприимчивой к ошибке. В результате можно повысить точность РАС без ухудшения устойчивости.
Дата добавления: 2020-10-25; просмотров: 980;
Поиск по сайту
Узнать еще
- II. Бесполые способы размножения.
- III. Способы формирования фонда капитального ремонта
- А) Способы изображения пространственного строения энантиомеров
- Автоматизация процесса назначения IP-адресов узлам сети - протокол DHCP
- Автоматизация процесса назначения IP-адресов узлам сети – протокол DHCP
- Автомобиль с доставленными звеньями трубы; 2 - автомобильный кран; 3 - лекальные блоки; 4 - звенья водопропускной трубы
- Административно - правовой и гражданско-правовой способы
- АНАЛИТИЧЕСКИЕ ГРАММАТИЧЕСКИЕ СПОСОБЫ

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
