Датчики перегрузки (линейного ускорения).
Измерение вектора перегрузки (линейного ускорения) осуществляется датчиками перегрузки – низкочастотными линейными акселерометрами (диапазон частот 0...400 Гц). В дальнейшем будем их называть датчиками перегрузки или линейными акселерометрами.
Линейные акселерометры по назначению и обусловленному этим назначением диапазону и собственной частоте условно разделены на следующие три группы:
· датчики перегрузки самолета с собственной частотой чувствительного элемента 5...50 Гц и диапазоном измерения до ±10g;
· низкочастотные датчики виброперегрузки с собственной частотой чувствительного элемента 100...400 Гц и диапазоном измерения до ±10g;
· широкополосные датчики виброперегрузки с собственной частотой чувствительного элемента 20 000...30 000 Гц и диапазоном измерения до ±150 g.
Обобщенная схема классификации линейных акселерометров для летных испытаний представлена на рис. 1.
|

Рис. 1. Классификация линейных акселерометров для летных испытаний.
Для измерений перегрузок самолета широко применяются потенциометрические датчики. С их помощью наиболее просто реализуется измерительная схема с непосредственной регистрацией на аппаратуру точной магнитной записи или светолучевые осциллографы.
Наиболее широкое применение получили три принципиальные схемы построения акселерометров (рис. 2).
|
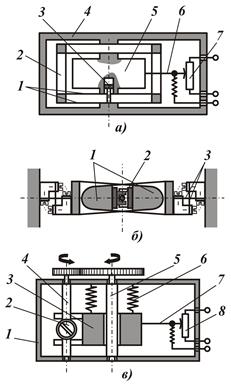
Рис. 2. Принципиальные схемы датчиков перегрузки:
а) – осевой акселерометр с плоскими пружинами: 1 – пружины; 2 – стойки; 3 – поршень воздушного демпфера; 4 – корпус; 5 – инерционная масса; 6 – ползунок; 7 – потенциометр;
б) – маятниковый акселерометр; 1 – маятники; 2 – шарнир; 3 – пружина;
в) – акселерометр с вращающимися направляющими опорами и сухим трением: 1 – корпус; 2 – демпфер; 3 – инерционная масса; 4 – ось демпфера; 5 – вращающаяся опора; 6 – пружина; 7 – ползунок; 8 – потенциометр.
В первой схеме осевого акселерометра направление перемещения груза чувствительного элемента обеспечивается упругой системой из плоских пружин (см. рис. 2а). Эта система осуществляет линейное перемещение чувствительного элемента, однако она имеет довольно существенный недостаток, заключающийся в наличии второго резонанса, близко расположенного к основной частоте, который обусловлен незадемпфированными массами соединительных деталей на концах плоских пружин. Частота второго резонанса в 3...4 раза выше основной частоты.
Ряд датчиков, имеющих сравнительно малый диапазон перегрузок (до ±2 g), построен по схеме (см. рис. 2б). Чувствительный элемент этих датчиков выполнен в виде двух горизонтальных маятников, шарнирно связанных между собой. Маятники подвешены на системе из двух пар перекрещивающихся под прямым углом плоских пружин, выполняющих роль упругих шарниров. Нагрузки по вертикальной оси, перпендикулярной плоскости перемещения маятников, не воспринимаются схемой, так как моменты сил маятников относительно вертикальных осей взаимно компенсируются в шарнире.
В датчиках предусмотрены различные виды демпфирования колебаний груза чувствительного элемента. Система демпфирования является одним из слабых мест в конструкции указанных акселерометров.
Применение жидкостного демпфирования ограничивает температурный диапазон датчика из-за большого температурного коэффициента вязкости рабочей жидкости, необходимости герметизации и учета присоединенной массы жидкости. Для сохранения постоянства степени демпфирования, равной 0,4...0,8 при изменении температуры окружающей среды, в ряде датчиков предусмотрен биметаллический регулятор, изменяющий величину зазора, через который протекает жидкость. Изменение степени демпфирования составляет ±0,2 при работе датчика в климатическом диапазоне температур.
Воздушный демпфер эффективен для негерметичных акселерометров лишь на малых высотах полета.
Электромагнитный демпфер, принцип действия которого основан на возникновении вихревых токов, тормозящих движение металлических деталей, перемещающихся в магнитном поле, практически не обеспечивает степень демпфирования, близкую к оптимальной.
Поэтому широко распространены датчики перегрузки с вращающимися направляющими опорами и трением без смазочного материала (сухим трением). В основе принципа работы датчика лежит идея, высказанная Н. Е. Жуковским, об уменьшении трения при движении вдоль вращающейся направляющей.
Эта, идея реализуется в виде вращающихся направляющих массы чувствительного элемента (см. рис. 2в). Этот же эффект используется для демпфирования колебаний груза чувствительного элемента, причем демпфирование в этом случае имеет характер вязкого трения. Груз, подвешенный на системе винтовых пружин, перемещается вдоль жестких осей, одна из которых является направляющей, а другая одновременно служит осью демпфера. С целью устранения влияния Кулонова трения, оси приводятся во вращение электромотором. Датчики этого типа имеют сравнительно лучшие метрологические характеристики – основная погрешность составляет примерно 0,5%. Уменьшение погрешности в некоторых датчиках (до 0,2%) осуществляется применением многошкального (многоступенчатого) потенциометра.
Величина перегрузки, определяемая датчиком, искажается рядом погрешностей, основными из которых являются инструментальные, динамические и методические.
Инструментальные погрешности (основная и дополнительные) возникают в результате изменения параметров и характеристик материалов, из которых изготовлен датчик, несовершенства технологии, действия на параметры датчика влияющих величин. К источникам погрешности можно отнести силы трения и люфты в опорах и направляющих, гистерезис и упругое последействие системы подвески инерционной массы, изменение характеристик чувствительного элемента при изменении окружающей температуры и режимов источника питания и др. Важным фактором является исключение или сведение к минимуму влияния неизмеряемых составляющих перегрузок. Эта составляющая погрешности свойственна той или иной конструкции датчика и характеризует несовершенство последней.
Анализ оценки точности измерения перегрузки потенциометрическими датчиками различных моделей показывает, что, например, случайные составляющие погрешности измерения, полученные в лабораторных условиях и на установившихся режимах полета, практически одинаковы. Случайная составляющая перегрузки на неустановившихся режимах полета может увеличиться в 2...4 раза. Систематическая составляющая погрешности датчиков в полетах имеет переменный характер и составляет 0,01...0,02 единиц перегрузки. Применение совершенных конструктивных и технологических приемов и решений позволяет, как известно, уменьшить инструментальные погрешности до величины <1%.
Динамические погрешности датчика являются доминирующими по сравнению с инструментальными. Они определяются, в основном, амплитудными и фазовыми искажениями инерционной системы датчика. Оценка их осуществляется на основании амплитудно-частотной и фазочастотной характеристик (АЧХ и ФЧХ).
АЧХ  датчика представляет собой зависимость отношения амплитуды ао выходного сигнала датчика к амплитуде задаваемого гармонического ускорения
датчика представляет собой зависимость отношения амплитуды ао выходного сигнала датчика к амплитуде задаваемого гармонического ускорения  от частоты последнего при определенном значении степени демпфирования
от частоты последнего при определенном значении степени демпфирования  датчика.
датчика.
АЧХ удобно представить в безразмерной форме:
 , (1)
, (1)
где  – отношение амплитуды выходного сигнала акселерометра к задаваемому ускорению в статическом режиме;
– отношение амплитуды выходного сигнала акселерометра к задаваемому ускорению в статическом режиме;  – безразмерная частота.
– безразмерная частота.
ФЧХ акселерометра
 . (2)
. (2)
Здесь  – фазовый сдвиг.
– фазовый сдвиг.
По АЧХ определяется величина амплитудных искажений датчика. ФЧХ позволяет определить получающийся при этом сдвиг фаз между колебаниями самолета и колебаниями инерционной массы датчика. Амплитудно-частотная погрешность измеряемого ускорения  . (3)
. (3)
Она зависит от отношения и величины степени демпфирования . Если допустимая величина погрешности составляет  %, то верхняя граничная частота диапазона измерения может быть определена из уравнения (3) при подстановке
%, то верхняя граничная частота диапазона измерения может быть определена из уравнения (3) при подстановке  .
.
В настоящее время не выявлены пути коренного улучшения динамических характеристик потенциометрических датчиков перегрузки. В значительной степени это определяется невозможностью добиться одновременно высокой статической и динамической точности. Действительно, для уменьшения динамической погрешности необходимо, как видно из выражений (1) и (2), увеличить частоту собственных колебаний датчика, однако это связано с увеличением жесткости пружины, а следовательно, с уменьшением чувствительности и точности измерения постоянных и инфранизкочастотных перегрузок и повышением порога чувствительности. Кроме того, необходимо обеспечение и поддержание оптимальной степени демпфирования датчика.
Многие датчики должны работать в широком низкочастотном, диапазоне. Однако их АЧХ имеют большую неравномерность, что, приводит к появлению недопустимых частотных погрешностей. Для исправления АЧХ датчиков, т.е. для получения, например, пологих характеристик в рабочем диапазоне частот, применяют корректирующие звенья. С этой целью в некоторых моделях акселерометров заложена электрическая коррекция АЧХ с помощью встроенного в датчик фильтра низких частот. Применяются также автономные фильтры, устанавливаемые, как правило, в регистрирующем устройстве.
Чем меньше , тем меньше частотная и фазовая погрешности датчика. Обычно при  частотная погрешность составляет
частотная погрешность составляет  т.е. наибольшая измеряемая частота равна одной десятой собственной частоты датчика. Бели полоса частот измеряемой перегрузки близка к собственной частоте датчика, то погрешность измерения перегрузки существенно (до нескольких десятков процентов) возрастает и становится значительно больше статической погрешности, приведенной в паспорте.
т.е. наибольшая измеряемая частота равна одной десятой собственной частоты датчика. Бели полоса частот измеряемой перегрузки близка к собственной частоте датчика, то погрешность измерения перегрузки существенно (до нескольких десятков процентов) возрастает и становится значительно больше статической погрешности, приведенной в паспорте.
При малых значениях  ФЧХ пропорциональна , что также является критерием неискаженного воспроизведения измеряемой величины.
ФЧХ пропорциональна , что также является критерием неискаженного воспроизведения измеряемой величины.
Наименьшая погрешность, при прочих равных условиях, получится при степени демпфирования = 0,5.. .0,7.
Основным же недостатком потенциометрических датчиков является их низкая собственная частота (единицы ... десятки Гц). Поэтому датчики следует применять только при измерении постоянных и инфранизкочастотных ( ) перегрузок при обязательном наличии в паспорте АЧХ и ФЧХ. Чувствительность датчика перегрузки тем меньше, чем выше его собственная частота. Это обстоятельство ограничивает возможность выбора датчиков с высокой собственной частотой.
Значительно лучшими динамическими свойствами обладают индуктивные акселерометры, которые находят применение для измерения перегрузки самолета (в частности, в скоростных осях). Сравнительно малые габаритные размеры и высокая собственная частота датчика при наличии герметичного корпуса, обеспечивающего применение воздушного демпфирования, способствуют широкому его применению.
Рассмотренные выше недостатки акселерометров прямого преобразования привели к необходимости применения приборов принципиально иного типа, среди которых перспективными являются компенсационные акселерометры, а также акселерометры с частотным выходом.
Принцип действия компенсационного акселерометра основан на автоматическом уравновешивании силы инерции чувствительного элемента силой, значение которой можно измерить достаточно точно, В этих приборах обычная механическая пружина заменена «электрической пружиной» – электромеханическим устройством, которое создает момент, компенсирующий инерционный момент, возникающий под действием измеряемого ускорения. Акселерометры компенсационного типа обладают высокой точностью и линейностью. Выбором коэффициента усиления усилителя можно достичь относительно высокой частоты собственных колебаний. Выбором  может быть получена достаточно высокая чувствительность прибора.
может быть получена достаточно высокая чувствительность прибора.
Таким образом, у компенсационных акселерометров выбором параметров можно в значительной степени добиться высокой статической и динамической точности. Еще одним достоинством компенсационных акселерометров является малое перемещение чувствительного элемента, что обеспечивает, наряду с точностью, и высокую линейность градуировочной характеристики прибора.
Инструментальная погрешность акселерометра в статическом режиме может быть сведена к минимуму путем управления конструктивными и схемотехническими параметрами. При этом одновременно увеличивается  , а, следовательно, снижаются динамические погрешности. Достаточно большие значения собственных частот акселерометра и связанное с этим малое перемещение чувствительного элемента ведут к уменьшению погрешности поверки приборов этого типа на ротационных установках.
, а, следовательно, снижаются динамические погрешности. Достаточно большие значения собственных частот акселерометра и связанное с этим малое перемещение чувствительного элемента ведут к уменьшению погрешности поверки приборов этого типа на ротационных установках.
Правильная установка датчиков перегрузки любого принципа преобразования определяет во многом достоверность получения результата измеряемого параметра.
Датчики перегрузки должны устанавливаться на ЛА в его центре масс; направление измерительных осей датчиков должно совпадать с направлением осей связанной системы координат ЛА. Однако добиться выполнения этих условий практически невозможно. Поэтому возникают соответствующие методические погрешности. Абсолютная величина погрешности, обусловленная неточной ориентацией датчика, равна синусу угла между измерительной осью датчика и направлением соответствующей оси связанной системы координат ЛА. Уменьшение погрешности достигается точным ориентированием датчика с допустимой непараллельностью осей не более 5...10'. Регистрация установочных углов производится на ЛА, установленном в линию полета. Датчик перегрузки, установленный вне центра масс ЛА, измеряет сумму составляющей перегрузки, приложенной в центе масс ЛА, и составляющей перегрузки, вызванной вращением ЛА относительно его центра масс. Поэтому, с целью учета погрешности, производится определение координат датчика относительно центра масс ЛА. Погрешность определения координат не должна превышать ±20 мм. В связи с тем, что положение центра масс ЛА в полете изменяется, в ряде случаев оно учитывается.
Характер контактирования датчика с ЛА имеет важное значение. Материал и жесткость конструкции кронштейна выбираются такими, чтобы обеспечить заданную непараллельность осей датчика и ЛА в полете при действии на конструкцию перегрузок и возможных перепадов температуры; кроме того, исключается возникновение резонансных колебаний кронштейна с датчиком. В ряде случаев датчики устанавливают на нивелировочную площадку, с допустимой непараллельностью ее установочной плоскости относительно плоскости ОXZ ЛА не более ±15'.
Дата добавления: 2020-10-14; просмотров: 877;
Поиск по сайту
Узнать еще
- Акустические датчики
- Взвешивающие устройства АШЛ - датчики натяжения каната
- Генераторные датчики
- Гидростатические датчики уровня
- Гирокомпасы как датчики направлений. Принципы работы ГК, их особенности. Эксплутационные проверки.
- Датчики (измерительные преобразователи).
- ДАТЧИКИ ВЫСОТЫ И СКОРОСТИ
- Датчики двигателей с впрыском топлива

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
