ДАТЧИКИ УГЛОВОГО ПОЛОЖЕНИЯ САМОЛЕТА В ПРОСТРАНСТВЕ
Углы тангажа, крена и рыскания, т.е. углы между осями связанной и нормальной систем координат, определяют положение самолета относительно естественного горизонта или истинной вертикали.
Эти параметры измеряют чаще с помощью датчиков гироскопических вертикалей (гировертикалей).
Особенность гироскопического датчика заключается в том, что направление его кинетического момента сохраняется неизменным в пространстве, а не относительно Земли или перемещаемого самолета. Допустимая погрешность определения направления истинной вертикали должна быть менее 1°. С этой целью для измерения углов крена и тангажа самолета наиболее широко применяются датчики гировертикали с силовой гироскопической стабилизацией. Датчик ЦГВ представляет собой двухгироскопную гиростабилизированную платформу, корректируемую по вертикали жидкостным маятниковым элементом. Повышенная точность датчика по сравнению, например, с одногироскопными датчиками, достигается благодаря применению принципа силовой гироскопической стабилизации.
В датчике ЦГВ выбрана малая скорость прецессии от коррекции, снижающая погрешность в полете, так как в этом случае гировертикаль под действием линейных и угловых ускорений восстанавливается и выдерживается более точно.
Съем сигналов, пропорциональных углам крена и тангажа, проводится с нескольких потенциометрических преобразователей, имеющих различные диапазоны измерений.
При определении маневренных и аэродинамических характеристик применяется датчик ЦГВ другой модели. В этом приборе съем сигнала проводится с помощью многошкальных потенциометров.
Для измерения курса самолета применяется, как правило, штатная курсовая система.
4. ДАТЧИКИ АЭРОДИНАМИЧЕСКИХ УГЛОВ АТАКИ И СКОЛЬЖЕНИЯ
Угол атаки и угол скольжения являются углами, определяющими направление скорости летательного аппарата в связанной системе координат и в системе координат, связанной с пространственным углом атаки.
Измерение углов атаки и скольжения осуществляется, в основном, с помощью датчиков ДУАС флюгерного типа. Получили применение также щелевые датчики.
Флюгерные датчики состоят из статически уравновешенных крылышек, которые устанавливаются по потоку, совпадающему с направлением скорости самолета (скоростная ось). Угол между осью симметрии крылышек и осью корпуса датчика измеряется потенциометрическими преобразователями. Измерение углов атаки и скольжения проводится независимо.
Датчики на самолете устанавливаются, по возможности, в невозмущенном потоке, чаще всего на штанге, расположенной впереди фюзеляжа.
Датчикам флюгерного типа свойственны следующие погрешности:
· на дозвуковых скоростях местные углы потока могут отличаться (вследствие его искажения) от углов атаки самолета;
· на сверхзвуковых скоростях точность измерения параметров в существенной мере определяется степенью деформирования и уровнем вибрации штанги, на которой установлен датчик.
Известное применение при летных испытаниях получили комбинированные датчики, измеряющие в скоростной системе осей координат самолета кроме углов атаки и скольжения, например, приборную скорость, температуру заторможенного потока воздуха, перегрузку.
ДАТЧИКИ ДАВЛЕНИЯ
Давление – наиболее распространенная физическая величина, измеряемая при летных испытаниях. Измерения давления воздуха и жидкости составляют около 25% объема измерений всех неэлектрических величин. При отсчете показаний датчика от абсолютного нуля (полного вакуума) полученное давление называют абсолютным. Если же показания датчика отсчитываются от абсолютного давления окружающей среды (атмосферного давления), полученное давление называют избыточным. При летных испытаниях часто измеряют разность двух давлений, ни одно из которых не является давлением окружающей среды. Эту разность называют перепадом давлений.
Для измерения давлений на борту ЛА используются датчики, чувствительные элементы которых представляют плоские и гофрированные мембраны и мембранные коробки.
Чувствительные элементы первого вида применяются при измерениях давлений высоких уровней в магистралях (давление топлива, давление в гидравлических системах), чувствительные элементы второго типа используются при измерениях малых давлении и перепадов.
|
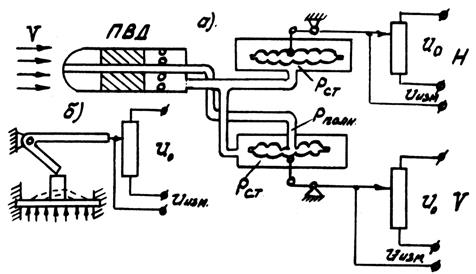
Рис. 1. Схемы измерения давлений с потенциометрическим преобразованием сигнала.
На рис. 1а показана схема измерения статического Рст и полного Рполн давлений, используемых при измерении барометрической высоты Н и скорости полета V. На рис. 1б дана схема датчика давления с плоской мембраной, перемещения которой преобразуются в электрический сигнал потенциометром.
Мембранные коробки бывают двух типов: анероидные – для измерений абсолютных давлений, в частности, высоты полета, и манометрические – для измерения перепадов давления, в частности, воздушной скорости.
Если пренебречь инерционностью чувствительного элемента, то уравнение, описывающее работу датчика давления, можно записать в виде

при начальном условии  . Здесь
. Здесь  – давление, действующее в полости датчика;
– давление, действующее в полости датчика;  – давление на входе датчика;
– давление на входе датчика;  – постоянная времени.
– постоянная времени.
С учетом инерционности упругого элемента и передаточно–множительного механизма, уравнение датчика будет
при начальных условиях  и
и  .
.
В уравнении m – подвижная масса в датчике, включающая часть мембраны, передаточный механизм и щетку потенциометра (рис. 1б); k1 и с1 – демпфирование и жесткость возвратных пружин соответственно; u(t) – текущее значение прогиба.
Кроме рассмотренных мембран в датчиках давлений используются и другие чувствительные элементы – сильфоны и трубки Бурдона.
Датчики давления делятся на две группы: для измерения давлений в агрессивных средах (корпус красного цвета, в шифре буква «К») а для измерений давления кислорода (на корпусе голубая полоса, в шифре буква «Г»). Применение датчиков группы «К» для измерения давления кислорода запрещается.
1. ОСНОВНЫЕ ПРИНЦИПЫ ПОСТРОЕНИЯ
На рис. 2 приведена классификация принципов построения датчиков давления для летных испытаний.
|
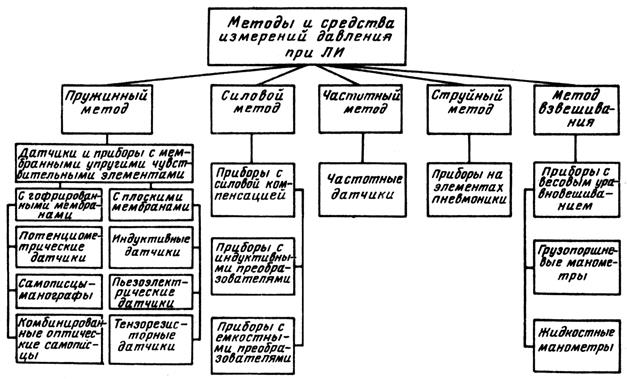
Рис. 2. Методы построения датчиков давления при летных испытаниях.
Широкое применение нашел пружинный метод.
Датчики с гофрированными мембранами используются, в основном, для измерения воздушных параметров полета (высоты и скорости) и медленноменяющихся (с частотой до 1...3 Гц) давлений, например, по тракту газотурбинных двигателей.
Потенциометрические датчики получили широкое распространение благодаря большому выходному сигналу, который можно регистрировать непосредственно аппаратурой точной магнитной записи или светолучевыми осциллографами.
Требования миниатюризации и обеспечения эксплуатации в сложных условиях обусловили интенсивное развитие и внедрение индуктивных, пьезоэлектрических и тензорезисторных датчиков давления с плоскими мембранами. Датчики могут измерять давления в широких амплитудных, частотных и температурных диапазонах.
Индуктивные и тензорезисторные датчики осуществляют, в принципе, функции измерения как постоянной, так и переменной составляющих давления. Пьезоэлектрические датчики измеряют только переменную составляющую давления. Решающее достоинство тензорезисторных датчиков заключается в достижении высокого уровня их миниатюризации.
Получили развитие частотные датчики, а также приборы, основанные на методе силовой компенсации. Эти датчики и приборы обладают повышенной точностью и применяются, в основном, для измерения воздушных параметров полета. Создаются также приборы, основанные на элементах пневмоники, с обеспечением, в первую очередь, функции измерений малых воздушных скоростей.
Метод взвешивания, основанный на уравновешивании давления гирями или столбом жидкости, используется, как правило, в образцовых средствах измерений давления.
Типовая структурная схема преобразования сигналов в датчиках давления приведена на рис. 3.
|

Рис. 3. Структурная схема преобразований сигнала в датчиках давления
На схеме обозначено: 1 – звено, отображающее процесс передачи давления (по трубопроводу, приемнику давления, через защитный экран); 2 – звено, отображающее установку датчика на объекте; 3 – упругий элемент (преобразователь давление – сила); 4 – связующее упругого элемента с чувствительным элементом; 5 – чувствительный элемент (преобразователь неэлектрической величины в электрический сигнал); 6 – измерительная цепь.
Схема объединяет индуктивные, тензорезисторные и другие датчики, в которых применяется преобразование деформации упругого элемента в относительное изменение сопротивления. Она описывает большую номенклатуру датчиков, отличающихся между собой диапазонами измерений, конструктивным оформлением, условиями эксплуатации.
Дата добавления: 2020-10-14; просмотров: 886;
Поиск по сайту
Узнать еще
- II. Основные положения
- II. Отклонения расположения поверхностей
- III. Суммарные допуски формы расположения
- А - решетчатая конструкция из бетонных элементов; б - пространственная георешетка; в - укрепление откоса георешеткой; 1, 2 - бетонные элементы; 3 - анкеры; 4 - тяжи анкеров
- А) Способы изображения пространственного строения энантиомеров
- Адаптивная пространственная фильтрация активных помех
- Активные системы управления и нагружение частей самолета
- Акустические датчики

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
