МЕТОДЫ ПРЕОБРАЗОВАНИЯ ФИЗИЧЕСКОЙ ВЕЛИЧИНЫ В ЭЛЕКТРИЧЕСКИЙ СИГНАЛ
Процесс измерения любой физической величины представляет собой совокупность ряда последовательных измерительных преобразований (см. рис. 1). Основными из них являются:
· восприятие датчиком физической величины и преобразование ее в электрический сигнал,
· приведение электрическим преобразователем, называемым обычно согласующим устройством выходного сигнала датчика к единой форме (нормирование),
· квантование сигнала по уровню и дискредитизация во времени,
· кодирование, т е. приведение к цифровой форме.
Конструктивно преобразователи могут быть выполнены в виде единого устройства или отдельных функциональных блоков. Последнее исполнение предпочтительнее, так как позволяет унифицировать технические средства информационно–измерительных систем, и на этой основе создавать различные комплектации в зависимости от задач испытаний.
Все измерительные преобразователи принято подразделять на функциональные (неоперационные) и операционные или решающие.
В функциональных преобразователях выходной сигнал связан с входным сигналом одной из зависимостей
 .
.
Большинство датчиков прямого преобразования физических величин, применяемых при летных испытаниях, представляют собой функциональные измерительные преобразователи.
|
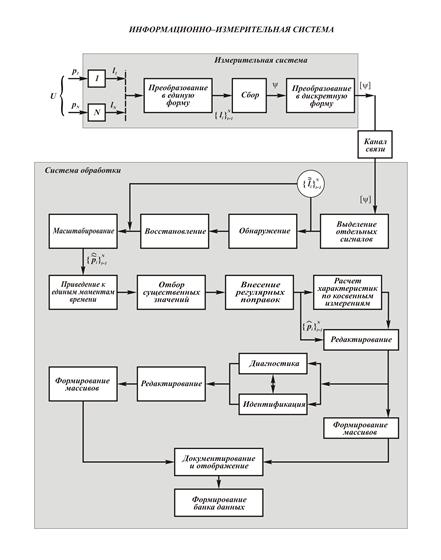
Рис. 1. Модель преобразования информации в ИИС
В операционных измерительных преобразователях, к которым относятся, в частности, компенсационные датчики, а также системы измерения расхода, выходные и входные величины связаны интегродифференциальным уравнением
 .
.
Преобразование информации может описываться также теми или иными логическими операциями, как, например, в устройствах сравнения или в решающих устройствах.
В модуляционных измерительных преобразователях осуществляется преобразование спектра сигнала, которое может быть аналоговым или аналого–цифровым. Последний случай относится к импульсной модуляции. Наконец, в состав информационно–измерительных систем летных испытаний входят аналого–цифровые и цифроаналоговые преобразователи, в которых входная или выходная величина представляет собой цифровой код, образуемый комбинацией импульсов, или комбинацией позиционных составляющих импульсов.
Датчик (источник информации) представляет собой преобразователь измеряемой физической величины в электрический сигнал, являющийся мерой этой величины. По принципу действия датчики принято классифицировать на так называемые пассивные, требующие внешних источников питания, и активные, преобразование энергии в которых осуществляется непосредственно.
К пассивным относятся преобразователи резисторные, индуктивные, емкостные, механо– и магниторезистивные, термо– и фоторезистивные, ионизационные и др.
Пьезоэлектрические, термоэлектрические, электрокинетические и пироэлектрические преобразователи относятся к классу активных.
Датчик для измерений той или иной физической величины обычно состоит из чувствительного элемента, преобразующего физическую величину (силу, давление, ускорение, угловую скорость и т п.) в линейное или угловое перемещение, и преобразователя перемещения в электрическую величину (сопротивление, индуктивность, емкость, заряд), которые затем, в зависимости от электрической схемы, преобразуются в параметры напряжения или тока (величину, частоту, фазу).
Полная схема преобразования сигнала, например, в датчиках давления представлена на рис. 2.
|
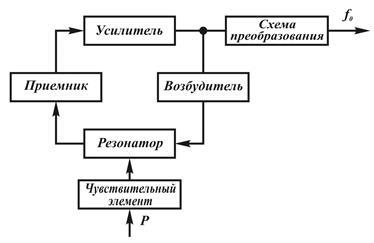
Рис. 2. Функциональная схема частотного датчика
Важнейшими требованиями, предъявляемыми к датчикам для летных испытаний, являются:
· линейность статической характеристики,
· ширина полосы пропускания,
· малая динамическая погрешность в полосе пропускания
· суммарная статическая погрешность.
Эти требования дополняются эксплуатационными:
· малой зависимостью от внешних условий,
· большим ресурсом и надежностью,
· простотой установки на летательном аппарате,
· электромагнитной совместимостью со штатным оборудованием летательного аппарата,
а также экономическими – малой стоимостью.
Линейность статической характеристики или постоянство чувствительности (крутизны) датчика  , определяемая линейностью чувствительного элемента и преобразователя, упрощает операцию масштабирования при обработке и обеспечивает независимость относительной погрешности датчика от величины входного (выходного) сигнала.
, определяемая линейностью чувствительного элемента и преобразователя, упрощает операцию масштабирования при обработке и обеспечивает независимость относительной погрешности датчика от величины входного (выходного) сигнала.
Динамическую погрешность датчика, если он представляет собой линейную динамическую систему, характеризует передаточная функция. Полоса пропускания датчика определяется как интервал частот входного воздействия  , в котором динамическая погрешность не превосходит заданной величины. Если при этом фазочастотная характеристика датчика линейна, то выходной сигнал датчика практически без искажений будет отображать форму входного воздействия. Поэтому, например, к датчикам переменных линейных перегрузок, переменных давлений, угловой скорости предъявляется требование линейности динамической системы, широкой полосы пропускания и линейности фазово–частотных характеристик.
, в котором динамическая погрешность не превосходит заданной величины. Если при этом фазочастотная характеристика датчика линейна, то выходной сигнал датчика практически без искажений будет отображать форму входного воздействия. Поэтому, например, к датчикам переменных линейных перегрузок, переменных давлений, угловой скорости предъявляется требование линейности динамической системы, широкой полосы пропускания и линейности фазово–частотных характеристик.
Из всего многообразия известных физических эффектов в датчиках для летных испытаний наибольшее применение нашли потенциометрические, индуктивные, пьезоэлектрические, термоэлектрические и тензорезисторные преобразователи измеряемой физической величины в электрический сигнал. Это обусловлено сравнительной простотой конструктивного выполнения таких преобразователей при серийном изготовлении и устойчивостью их работы в условиях воздействия различных дестабилизирующих факторов, имеющих место при эксплуатации датчиков на летательном аппарате.
Дата добавления: 2020-10-14; просмотров: 726;
Поиск по сайту
Узнать еще
- A — отношение сигнал/помеха.
- F06 Другие психические расстройства вследствие повреждения или дисфункции головного мозга, либо вследствие физической болезни
- I. Гидрометаллургические методы
- I. Погрешности механической обработки. Точность обработки. Методы их расчёта
- II. Методы исследования истории медицины.
- II. Пирометаллургические методы.
- II.II. Репродуктивные методы.
- II.III. Частично - поисковые или эвристические методы.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
