А) Способ эвольвентных разностей
(разработан И.В. Гоникбергом).
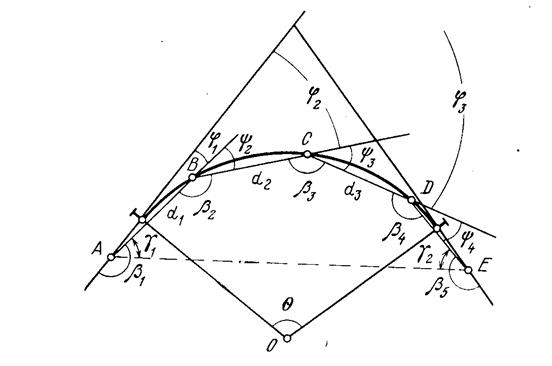
Рисунок 222 - Схема съемки железнодорожной кривой по способу эвольвентных разностей
На снимаемом участке пути лентой или рулеткой отмечают на внешней нитке пути 20-метровые отрезки (“элементарные хорды “) и разбивают 100-метровые пикеты, при этом конечные точки А и Е (рис. 222) выбирают на прямых участках на расстоянии 40-60 м от видимого начала и конца кривой.
На пикетах теодолитом измеряют углы поворота хорд  и при возможности примычные углы
и при возможности примычные углы  Одновременно на плюсовых точках +20, +40,+60,+80 (рис. 4) способом бокового нивелирования при помощи теодолита и горизонтально установленной рейки измеряют стрелы изгиба кривой от хорды между пикетами. Рейка закрепляется особым башмаком на гранях головки рельса, ее нулевой отсчет (“пятка”) совпадает с продольной осью рельса.
Одновременно на плюсовых точках +20, +40,+60,+80 (рис. 4) способом бокового нивелирования при помощи теодолита и горизонтально установленной рейки измеряют стрелы изгиба кривой от хорды между пикетами. Рейка закрепляется особым башмаком на гранях головки рельса, ее нулевой отсчет (“пятка”) совпадает с продольной осью рельса.
На пикетах А, В, С, D теодолит и визирные марки также центрируются над осью рельса. Стрелы изгиба измеряют дважды: в прямом (А-АВ) и обратном (В-ВА). Из двух значений стрел берут среднее, разность между ними не должна превышать 5 мм.
В пикетных точках А, В, С... по измеренным углам  вычисляют углы поворота хорд
вычисляют углы поворота хорд  и азимуты хорд относительно линии тангенса (рис. 222):
и азимуты хорд относительно линии тангенса (рис. 222):
Так как отрезки d = 20n , где n -число 20-ти метровых хорд между соседними пикетами (обычно n =5, в конечных хордах n может быть равно 3 или 4), то получим (углы  взяты в радианах)
взяты в радианах)
Для вычисления эвольвент плюсовых точек используют измеренные стрелы изгиба кривой. Приращение эвольвенты на 20-ти метровый отрезок составляет
 ,
,
где  - алгебраическая разность стрел изгиба соседних точек (рис. 223). Последовательно суммируя величины приращений находят длины эвольвент для точек +20, +40,+60,+80.
- алгебраическая разность стрел изгиба соседних точек (рис. 223). Последовательно суммируя величины приращений находят длины эвольвент для точек +20, +40,+60,+80.
Так как в пределах каждого пикета  и , следовательно,
и , следовательно,
то для пикетажных точек должно соблюдаться равенство
что является контролем вычисления эвольвент.
При подборе радиуса кривой соблюдают условие, чтобы общий угол поворота существующей кривой, образованной линиями тангенсов, был равен проектному (  с= п) и кривая вновь подбираемого радиуса вписывалась в этот угол при минимальных сдвижках пути, а в так называемых критических точках (на участках искусственных сооружений и др.) эти сдвижки должны быть близки к нулю.
с= п) и кривая вновь подбираемого радиуса вписывалась в этот угол при минимальных сдвижках пути, а в так называемых критических точках (на участках искусственных сооружений и др.) эти сдвижки должны быть близки к нулю.
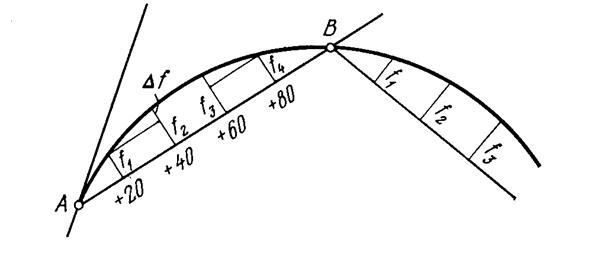
Рисунок 223 - Схема измерений стрел прогиба
Для отдельной хорды длиной b радиус круговой кривой R определяют по формуле:
или приближенно:

где f - стрела изгиба в середине хорды. Из определений по нескольким хордам берут среднее.
Для всей кривой радиус может быть найден по формуле:

где Эк - длина эвольвенты для конца кривой, - общий угол поворота в радианах.
Полученное значение R округляют до ближайшей стандартной величины и подсчитывают длину круговой кривой K=R и пикетаж главных ее точек.
Согласно формуле  величина рихтовки в текущей точке кривой:
величина рихтовки в текущей точке кривой: 
При этом, если ЭП >Эс, и Dl> 0, то путь сдвигают во внутрь кривой, если ЭП< ЭС , и Dl< 0 , то наружу.
Так как при вписывании переходных кривых круговая кривая смещается вовнутрь на величину р = l*l /24R то общая величина сдвижки при рихтовке пути будет:
а) в пределах сдвинутой круговой кривой:
б) в пределах второй половины переходной кривой от s=l/2 до примыкания к круговой кривой (s=l) :

в) в пределах первой половины переходной кривой от ее соединения с прямой (s=0) до s=l/2 :

где s - длина переходной кривой от ее начала до текущей точки; l - общая длина переходной кривой.
Точность способа.
Точность определения величин Dl рихтовки пути по формуле или  зависит, главным образом, от точности подсчета длины эвольвент существующего пути, так как длины проектных эвольвент могут быть вычислены с достаточной точностью, т. е.:
зависит, главным образом, от точности подсчета длины эвольвент существующего пути, так как длины проектных эвольвент могут быть вычислены с достаточной точностью, т. е.:

Определим ошибки подсчета эвольвент для пикетных точек. В формуле
 где, согласно уравнению
где, согласно уравнению
примем, что величины пикетов d1 = d2 =...= di = d. Тогда:

или  .
.
Средняя квадратическая ошибка полученной функции равна:
 ;
;
при условии, что 
Для конца кривой

Кроме того,

С учетом этих формул и для конца хода (i = п, di = К) и, принимая  , получим:
, получим:
 (I)
(I)
При возможности измерения примычных углов g1 и g2 (рис. 222) и уравнивания углов хода
 (II)
(II)
Если принять R=1000м, K=400 м, n=4, md/d=1/3000, mb=0.5’, то получим по формуле I mЭк=8.3 см, а по формуле II - mЭк =5.2 см, т.е. в уравненном ходе ошибка уменьшается более чем в 1.5 раза.
Для эвольвент плюсовых точек и найденной величине ошибки прибавится еще ошибка определения разности стрел изгиба, которая в среднем не превышает 5 мм.
Для рихтовки пути по плавной кривой большое значение имеет ошибка взаимного смещения соседних плюсовых точек , т.е. ошибка в подсчете приращения эвольвенты на 20-ти метровом отрезке кривой.
Б) Способ стрел изгиба.
В этом способе измеряют стрелы изгиба рельсов в середине каждой 20-ти метровой хорды с перекрытием через 10м (рис. 224). До начала измерений кривую или примыкающие к ней 40-60 метровые прямые участки разбивают на 10-ти метровые отрезки и отмечают их на рабочей грани наружного рельса. При измерениях используют два шаблона для натяжения 20-ти метровой нити и третий для измерения в средней точке нити стрелы изгиба рельса. На прямых участках стрела изгиба будет близкой к нулю.
По измеренным величинам стрел изгиба могут быть вычислены углы поворота хорд и углы поворота относительно тангенса кривой:



. . . . . . . . . . . . . . . .


где k=d/2=10,00 м.
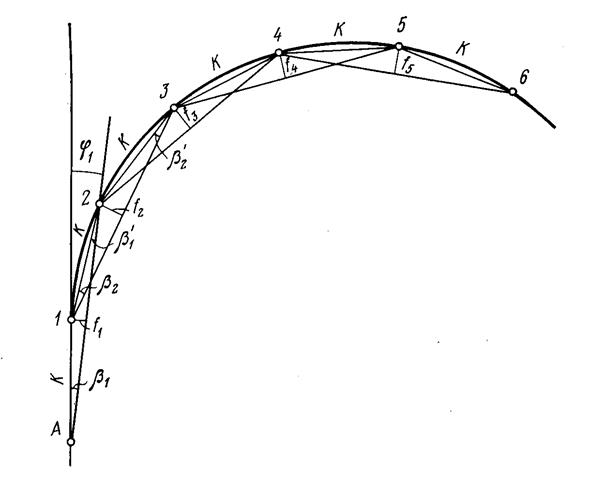
Рисунок 224 -Схема съемки железнодорожной кривой по способу стрел
изгиба
По углам или непосредственно по стрелам изгиба могут быть определены эвольвенты
 (А)
(А)
Зная расчетные и найденные по стрелам изгибов эвольвенты, для каждой точки кривой через k метров по формулам
Либо
 ;
;

вычисляют величины сдвижки пути.
В рассматриваемом способе основным источником ошибок является измерение стрел изгиба, включающее плановый сдвиг намеченных точек, неперпендикулярность измеряемых стрел к нити, собственно измерение. Приняв, что все стрелы прогиба измеряются примерно с одинаковой ошибкой mj, из формулы (A) получим для конечной эвольвенты (i=n)
 (Б)
(Б)
где n - число измеренных стрел изгиба (число полухорд k).
Принимая, как и в предыдущем примере, длину кривой 400м, число n= 400:10= 40, суммарную среднюю квадратическую ошибку mj =1 мм, по формуле (Б) получаем:
 мм,
мм,
что в несколько раз грубее, чем при способе эвольвентных разностей.
В способе стрел изгибов, вследствие определения углов по ворота хорд через очень малые интервалы, идет очень быстрое нарастание ошибок. Поэтому на длинных кривых этот способ не обеспечивает требуемой точности.
В) Фотограмметрический способ.
В основе фотограмметрического способа (Ф.Д. Рабинович. Фотограмметрическая съемка железнодорожных путей.М.,Недра,1974.) лежит принцип непосредственного измерения углов поворота оптических хорд путем совмещения изображения концов отрезков кривой на плановых крупномасштабных аэрофотоснимках. Для построения оптических хорд в наблюдательную систему особого прибора для съемки кривых по аэрофотоснимкам (ПСКА) помещена тонкая бипризма, смещающая изображение на определенную величину.
Бипризма скреплена с лимбом. При помощи ее вращения совмещают изображения противоположных концов дуг, измеряя при этом углы поворота i элементарных хорд относительно линии тангенса кривой
i=vi-v0 ,
где vi и v0 - отсчеты по лимбу прибора в данной и начальной съемочных точках.
Дины эвольвент находят по формуле:

Прибор изготовлен в виде приставки к прецизионному стереометру. Кроме угломерной насадки, в него входит универсальная наблюдательная марка со сменными номограммами для разбивки пикетов (100-метровых отрезков в масштабе снимка) на элементарные отрезки (20 или 40 м).
Опыт фотограмметрической съемки путей показывает, что ошибка измерения по нетрансформированным аэрофотоснимкам углов поворота не превышает в среднем 2’, а средняя квадратическая ошибка вычисления приращения эвольвенты для элементарного отрезка кривой, снятой прибором ПСКА, на аэрофотоснимках масштаба 1: 2000 - 1: 5000 составляет около 1,5 - 2 см.
Одновременно со съемкой кривых составляют план пути и путевого хозяйства в масштабе 1: 1000 и фотограмметрически определяют координаты необходимых точек, размеры междупутий, габариты приближений и др.
2.1.7.3. Автоматизация разбивочных работ в дорожном строительстве
Возведение дорожного полотна производят дорожно-строительными машинами по выставленным геодезическим знакам. Для достижения проектной высоты приходится часто восстанавливать разбивку поперечных профилей и многократно повторять перемещение земляных масс и выравнивание песчаного основания. Для повышения эффективности использования дорожно-строительных машин применяют способ автоматического или полуавтоматического ведения рабочего органа машины по заданному уклону, обеспечивающий требуемую точность планировочных работ.
Дата добавления: 2019-02-08; просмотров: 1266;
Поиск по сайту
Узнать еще
- II. Бесполые способы размножения.
- III. Способы формирования фонда капитального ремонта
- III. Шкала интервалов (разностей)
- IV. Выбор способа ориентации изображения.
- IV. Выбор способа формирования фонда капитального ремонта
- IV. Угол зрения. Разрешающая способность глаза.
- IV.2. Несущая способность (потенциальная емкость)
- А) в свежеуложенном бетоне; б) комбинированным способом; в) в затвердевшем бетоне; г) продольный шов; пунктиром показана обмазка штырей битумом

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
