Усилия на рычагах управления
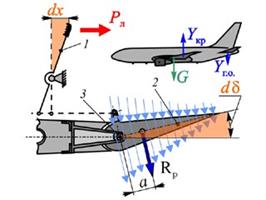
Усилия на рычагах управления в системах прямого управления зависят от аэродинамических сил на рулевых поверхностях. Так, в горизонтальном сбалансированном полете (рис. 12.4) летчик должен приложить к ручке 1 усилие Pл, чтобы удержать в определенном положении руль высоты 2, стремящийся под действием аэродинамической нагрузки, равнодействующая которой Rр приложена в центре давления руля, повернуться относительно оси 3 вращения руля.
Момент Мш = Rра аэродинамических сил руля относительно оси вращения называется шарнирным моментом руля.
Соотношение сил Pл и Rp будет зависеть от соотношения плеч рычагов и качалок в трассе управления.
В общем случае из условия равенства работы летчика (на перемещение рычага управления) и работы аэродинамических сил (при повороте рулевой поверхности на угол dδ)
|
| Рис. 12.4. К объяснению усилий на рычагах управления |
Pлdx = Мшdδ.
Отсюда
где

коэффициент кинематической передачи от руля к командному рычагу, показывающий соотношение между элементарными угловыми перемещениями руля dδ и потребными для этого элементарными линейными перемещениями ручки dx.
Как уже отмечалось, величину kш определяет соотношение плеч рычагов и качалок в трассе управления. Величина kш нормируется Авиационными правилами, поскольку возможные перемещения ручки (или штурвала) и педалей, а также усилия на них определяются физиологическими возможностями летчика.
Из приведенной формулы ясно, что усилия на рычагах управления будут зависеть от аэродинамических сил на рулевой поверхности, т. е. будут отслеживать изменение скорости, высоты полета и перегрузки, поскольку определенному отклонению руля (и, как следствие, определенной силе на рулевой поверхности) будет соответствовать определенная перегрузка (см. раздел 7.2.1).
При проектировании системы управления для обеспечения приемлемых для летчика перемещений и усилий на рычагах управления можно изменять шарнирный момент руля за счет выбора положения оси вращения руля относительно центра давления руля (рис. 12.5).
|
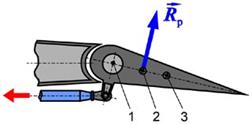
| Рис. 12.5. Положении оси вращения руля и шарнирный момент |
Так, если ось вращения руля проходит через точку 1 перед центром давления руля 2, в котором приложена аэродинамическая сила  , то это потребует от летчика усилий на преодоление возникающего на руле шарнирного момента, что соответствует подсознательным, рефлекторным действиям при пилотировании. Летчик в этом случае своими усилиями на рычагах управления "преодолевает" инерцию самолета при совершении маневра. Если ось вращения руля проходит через центр давления (точка 2), а тем более за центром давления (через точку 3), то это совершенно недопустимо в системах прямого управления.
, то это потребует от летчика усилий на преодоление возникающего на руле шарнирного момента, что соответствует подсознательным, рефлекторным действиям при пилотировании. Летчик в этом случае своими усилиями на рычагах управления "преодолевает" инерцию самолета при совершении маневра. Если ось вращения руля проходит через центр давления (точка 2), а тем более за центром давления (через точку 3), то это совершенно недопустимо в системах прямого управления.
В первом случае летчик не будет ощущать никаких усилий при перемещении рычагов управления, кроме сил трения в проводке.
Во втором случае на рычагах управления возникают усилия обратного знака (самолет как бы сам "ведет" рычаги в направлении, потребном для маневра), что нарушает привычные представления летчика о режиме полета и делает управление самолетом практически невозможным. Таким образом, выбором положения оси вращения рулевой поверхности можно привести шарнирный момент руля к потребным значениям.
|
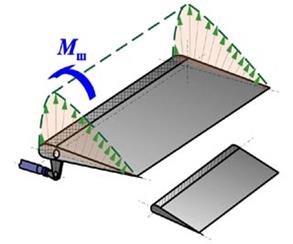
| Рис. 12.6. Аэродинамическая компенсация рулей |
Часть рулевой поверхности (на рис. 12.6 заштрихована), находящуюся перед осью вращения рулевой поверхности, принято называть аэродинамическим компенсатором, поскольку аэродинамические силы на этой части руля создают относительно оси вращения руля момент, который уменьшает (компенсирует) общий шарнирный момент Мш рулевой поверхности.
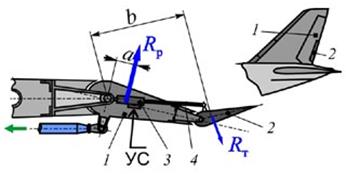
Для облегчения работы летчика (уменьшения усилий на рычагах управления в длительном установившемся полете) применяется расположенная на рулевой поверхности 1 (рис. 12.7) специальная аэродинамическая поверхность 2 - триммер (англ. trimmer - приводящий в порядок). Нажатием кнопки триммирования на ручке (штурвале) управления летчик подает управляющий электрический сигнал (УС) на электромеханизм 3, который сообщает поступательное движение тяге 4 и отклоняет триммер 2.
|
| Рис. 12.7. К объяснению принципа работы триммера |
Небольшая аэродинамическая сила триммера Rт, не уменьшая практически силу рулевой поверхности Rр, потребную для балансировки, позволяет существенно (практически до нуля) уменьшить шарнирный момент Мш = Rра - Rтb и, соответственно, усилия на рычагах управления. Если при Мш = 0 самолет сбалансирован, летчик может "бросить управление", поскольку усилия на рычагах управления также равны нулю. Самолет совершает устойчивый полет "при свободных рычагах управления".
Для дозвуковых самолетов выбором положения оси вращения рулевых поверхностей и, как следствие, шарнирного момента Мш, а также плеч рычагов и качалок (т. е. коэффициента кинематической передачи kш в соответствии с требованиями) удается добиться приемлемых для летчика показателей управляемости по всем каналам управления.
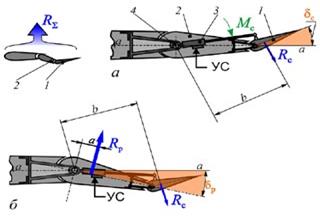
Принципиально возможно создание систем управления без непосредственной связи летчика с органами управления. На дозвуковых самолетах для этой цели используют серворули (от лат. servus - раб, слуга). Серворуль 1 (рис. 12.8) представляет собой аэродинамическую поверхность, аналогичную триммеру, однако серворуль устанавливается на свободноподвешенной рулевой поверхности 2. В этом случае отсутствуют тяги управления (или гибкая проводка), отклоняющие рулевую поверхность.
Подача управляющего сигнала (УС) на электромеханизм сервоуправления 3 приводит к отклонению на угол δс серворуля 1, как показано на рис. 12.8,а. Под действием набегающего потока на серворуле возникает сила Rс, которая на плече b создает момент Мс, поворачивающий свободноподвешенный руль 2 относительно оси 4.
|
| Рис. 12.8. К объяснению принципа работы серворуля |
Поворот рулевой поверхности (рис. 12.8,б) приведет к изменению кривизны несущей поверхности и возникновению на ней управляющей силы Rυ.
Повернувшись относительно оси 4, рулевая поверхность остановится, достигнув угла отклонения δр, при котором
Мш = Rра - Rсb = 0.
Таким образом, дозируя отклонения серворуля, летчик может создавать балансирующие и управляющие силы на рулях.
Однако в этом случае нет обратной связи по усилиям на рулевых поверхностях и усилиям на рычагах управления, поэтому летчик "не чувствует самолет".
Эту обратную связь по усилиям приходится формировать искусственно.
Дата добавления: 2019-02-08; просмотров: 977;
Поиск по сайту
Узнать еще
- B. Департаменты и управления функционального характера.
- Money Management - основы управления капиталом
- Автоматизация процессов управления перевозками
- АВТОМАТИЗАЦИЯ СТРАТЕГИЧЕСКИХ ЗАДАЧ УПРАВЛЕНИЯ
- Автоматизация управления процессами производства синтетического каучука
- Автоматизированная Система Оперативного Управления Перевозками (АСОУП)
- Автоматизированная система управления запасами агрегатов и комплектующих изделий (АС “СКЛАД”).
- Автоматизированные аналитико-статистические информационные системы, системы учета и управления

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
