Системы прямого управления самолетом
В системах прямого (непосредственного) управления командные рычаги непосредственно связаны с рулевыми поверхностями через проводку управления.
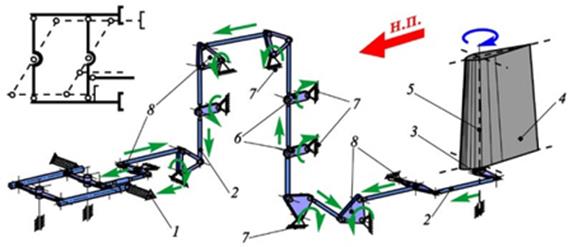
На рис. 12.1 показана принципиальная схема системы прямого управления рулем направления при помощи жесткой проводки управления.
|
| Рис. 12.1. Система прямого управления рулем направления |
Летчик усилием ноги перемещает педали 1 ножного управления и через систему жестких тяг 2 при помощи рычага ("кабанчика") 3, неподвижно соединенного с рулем направления 4, поворачивает руль относительно оси 5. Поддерживающие (опорные) качалки 6 обеспечивают прямолинейность трассы управления. При помощи рычажных качалок 8 различной конфигурации производится прокладка трассы управления в наиболее удобных местах по соображениям компоновки системы управления на самолете. За счет разных плеч качалок 8 изменяются направления движения тяг и усилия в проводке управления. Все качалки опираются на конструкцию планера самолета при помощи кронштейнов 7.
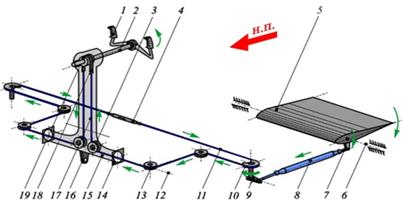
На рис. 12.2 показана принципиальная схема системы прямого управления элеронами при помощи тросовой (гибкой) проводки управления.
Поворот по стрелке (вправо по полету) штурвала 1, связанного осью 2 с зубчатым колесом 19, вызывает поступательное движение (по чертежу - вверх для левой по полету половины) многопластинчатой цепи (цепи Галля, по имени французского изобретателя) 18 и связанного с ней троса 17. Огибая ролики 3, трос выходит из корпуса штурвальной колонки 15, которая при помощи кронштейнов 14 крепится в кабине экипажа. Далее
тросовая проводка проходит в конструкции планера самолета к элерону. Необходимое направление трассы управления задается роликами 13, которые также удерживают трос
|
| Рис. 12.2. Система прямого управления элеронами |
от провисания на прямолинейных участках трассы. Натягиваясь, трос повернет сектор 10 и соединенную с ним неподвижно качалку 9, что приведет к поступательному движению тяги 8, поворачивающей элерон 5 вокруг оси 6 при помощи рычага 7. Поворот сектора 10 вызовет натяжение троса 11, что приведет к отклонению другого элерона (в данном случае - правого по полету). Регулировку системы и натяжку тросов при техническом обслуживании самолета на земле производят с помощью тандера 4.
Движение штурвала 1 вперед-назад по полету вызывает поворот штурвальной колонки 15 в подшипниках кронштейнов 14 относительно поперечной оси 12. При этом жесткая проводка управления, идущая от рычага 16 штурвальной колонки, осуществляет поворот руля высоты.
При движении штурвала вперед-назад тросы 17 и 11 гибкой проводки управления остаются неподвижными за счет того, что они выходят из корпуса штурвальной колонки точно по оси поворота 12. Это обеспечивает независимость управления рулями высоты и элеронами.
| Опишите работу системы при повороте штурвала влево. |
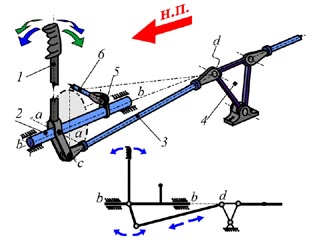
Независимость управления рулями высоты и элеронами с помощью ручки управления маневренными самолетами проиллюстрирована рис. 12.3.
|
| Рис. 12.3. Ручка управления маневренным самолетом |
Ручка 1 при отклонении вперед-назад вращается в подшипниках вокруг оси a-a, закрепленной неподвижно на оси-кронштейне 2. Поступательное движение тяги 3 через поддерживающую качалку 4 и далее по трассе управления передается на руль высоты. Отклонение ручки вбок (влево-вправо по полету) вызовет поворот оси-кронштейна 2 вокруг оси b-b. Поворот рычага 5, неподвижно закрепленного на оси-кронштейне 2, приведет к поступательному движению тяги 6, идущей к элеронам.
При этом тяга 3, идущая к рулям высоты, движется по конической поверхности с вершиной в точке d, направляющей которой является дуга окружности, описываемая точкой c ручки управления. Точка d, лежащая на оси b-b, неподвижна.
Следовательно, при отклонении элеронов руль высоты неподвижен, и наоборот.
Любое другое положение точки d (не на оси b-b) приведет к тому, что при отклонении элеронов будут отклоняться рули высоты, т. е. условия независимости управления на ручке не будут выполнены.
Дата добавления: 2019-02-08; просмотров: 1223;
Поиск по сайту
Узнать еще
- B. Департаменты и управления функционального характера.
- F45.38 другие органы или системы
- I. История возникновения и развития классно-урочной системы.
- I. Развитие Донбасса в условиях кризиса феодально-крепостнической системы
- I. Создание системы управленческого учета.
- III. Филогенез эндокринной системы.
- IV. Движение поездов при неисправности электрожезловой системы и порядок регулировки количества жезлов в жезловых аппаратах
- L.3. Состояние российской системы образования и необходимость ее

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
