Механические характеристики электропривода переменного тока с преобразователями частоты
Возможность управлять скоростью асинхронного и синхронного двигателей вытекает из известного соотношения (5.2)
 ,
,
из которого видно, что синхронная скорость двигателя прямо пропорциональна частоте напряжения статора и не зависит для данной машины от каких-либо других величин.
Вместе с тем при изменении частоты возникает также необходимость изменения напряжения источника питания. В параграфе (5.1) показано, что приложенное напряжение уравновешивается ЭДС самоиндукции в обмотке статора при условии, что активное сопротивление статора  =0
=0  , откуда магнитный поток статора
, откуда магнитный поток статора  ,т.е. магнитный поток статора определяется приложенным напряжением
,т.е. магнитный поток статора определяется приложенным напряжением  , частотой
, частотой  и параметрами обмотки.
и параметрами обмотки.
Из приведённого ниже выражения следует, что при неизменном напряжении источника питания  и изменении его частоты
и изменении его частоты  изменяется его магнитный поток. В частности, уменьшение частоты приводит к возрастанию потока и как следствие к насыщению машины и увеличению тока намагничивания
изменяется его магнитный поток. В частности, уменьшение частоты приводит к возрастанию потока и как следствие к насыщению машины и увеличению тока намагничивания  , что связано с ухудшением энергетических показателей и с её недопустимым нагревом. Увеличение частоты приводит к снижению потока двигателя, что при постоянном моменте
, что связано с ухудшением энергетических показателей и с её недопустимым нагревом. Увеличение частоты приводит к снижению потока двигателя, что при постоянном моменте  приводит к возрастанию тока ротора, т.е. к его тепловой перегрузке. Кроме того, снижается перегрузочная способность двигателя из-за снижения потока.
приводит к возрастанию тока ротора, т.е. к его тепловой перегрузке. Кроме того, снижается перегрузочная способность двигателя из-за снижения потока.
Для наилучшего использования асинхронного двигателя при частотном управлении необходимо также изменять напряжение в функции частоты и нагрузки.
При выборе соотношения между частотой и напряжением , подводимом к статору АД, прежде всего исходят из условия сохранению перегрузочной способности АД, т.е. кратности критического (максимального) момента  к моменту статической нагрузки
к моменту статической нагрузки  для любой из механических характеристик
для любой из механических характеристик
 .
.
Из (5.24) при пренебрежении падением напряжения на активном сопротивлении  обмотки статора и учитывая, что
обмотки статора и учитывая, что  ,
,  , можно записать
, можно записать
 ,
,
где А – коэффициент, не зависящий от напряжения и частоты. 
Тогда для любой частоты источника питания и соответствующей ей угловой скорости можно записать
 ,
,
где  - фазное напряжение источника питания (соответственно и на фазных обмотках статора) при частоте
- фазное напряжение источника питания (соответственно и на фазных обмотках статора) при частоте  ;
;
 – момент статической нагрузки на валу двигателя.
– момент статической нагрузки на валу двигателя.
Из последнего выражения следует, что для любых двух значений частоты  и
и  должно соблюдаться соотношение
должно соблюдаться соотношение
 . (6.39)
. (6.39)
Отсюда следует основной закон частотного управления скоростью в статических режимах АД
 . (6.40)
. (6.40)
Принимая один из режимов работы двигателя за номинальный, т.е. полагая, что при  к зажимам обмотки статора приложено номинальное напряжение
к зажимам обмотки статора приложено номинальное напряжение  и при этом двигатель развивает номинальный момент, можно основной закон частотного управления записать в следующем виде
и при этом двигатель развивает номинальный момент, можно основной закон частотного управления записать в следующем виде
 , (6.41)
, (6.41)
или в относительных единицах
 , (6.42)
, (6.42)
где  ;
;  ;
;  ;
;
 ,
,  – значения напряжения на статоре и статического момента, соответствующие значению регулируемой частоты
– значения напряжения на статоре и статического момента, соответствующие значению регулируемой частоты  .
.
Из полученных выражений следует, что закон изменения напряжения  определяется не только частотой источника питания
определяется не только частотой источника питания  , но и характером изменения момента статической нагрузки на валу двигателя при изменении скорости.
, но и характером изменения момента статической нагрузки на валу двигателя при изменении скорости.
Для рассмотренных в разделе 2 данного пособия электроприводов механизмов зависимость момента статических сопротивлений от угловой скорости представлена в виде степенной функции
 ,
,
которая в относительных единицах записывается в виде
 ,
,
где  - момент статической нагрузки при
- момент статической нагрузки при  .
.
Учитывая, что  , а значит,
, а значит,  , последнее уравнение можно записать в виде
, последнее уравнение можно записать в виде
 . (6.43)
. (6.43)
Подстановка (6.43) в (6.42) даёт
 . (6.44)
. (6.44)
В электроприводе обычно рассматриваются 3 наиболее часто встречающиеся типы статических нагрузок:
1. Момент статической нагрузки не зависит от скорости (рис. 6.36,а). При этом  .
.
2. Мощность на валу двигателя остается постоянной (рис. 6.36,б), т.е. здесь 

 .
.
3. Идеализированная вентиляторная нагрузка (рис. 6.36, в). В данном случае 
 .
.
Подставляя в (6.44) соответствующие значения  , можно записать для каждого из указанных типов статической нагрузки, основной закон управления напряжением в следующем виде.
, можно записать для каждого из указанных типов статической нагрузки, основной закон управления напряжением в следующем виде.
При постоянном моменте на валу
 (6.45)
(6.45)
или
 , (6.45,а)
, (6.45,а)
т.е. при  напряжение источника питания должно изменяться пропорционально его частоте.
напряжение источника питания должно изменяться пропорционально его частоте.
При постоянстве мощности
 (6.46)
(6.46)
или
 , (6.46,а)
, (6.46,а)
т.е. при постоянстве мощности статической нагрузки (гиперболический закон изменения  от скорости) напряжение источника питаниядолжно изменятся обратно пропорционально корню квадратному из значения частоты.
от скорости) напряжение источника питаниядолжно изменятся обратно пропорционально корню квадратному из значения частоты.
При вентиляторной нагрузке
 (6.47)
(6.47)
или
 , (6.47,а)
, (6.47,а)
т.е. при вентиляторной нагрузке напряжение источника питания должно изменяться обратно пропорционально квадрату значения частоты.
Необходимо подчеркнуть, что вывод основного закона частотного управления двигателем, определяемого формулой (6.40), является упрощенным при пренебрежении ряда факторов. Наиболее существенным из принятых допущений является не учёт падения напряжения на активном сопротивлении обмотки статора, т.е. допущение, что  . Поэтому полученные здесь соотношения (6.45) – (6.47) справедливы лишь для двигателей относительно больших мощностей при изменении частоты, а значит, и скорости ниже основной в диапазоне до
. Поэтому полученные здесь соотношения (6.45) – (6.47) справедливы лишь для двигателей относительно больших мощностей при изменении частоты, а значит, и скорости ниже основной в диапазоне до  . Для больших значений диапазона изменения скорости необходимо корректировать полученные соотношения, учитывая падение напряжения на активном сопротивлении обмотки статора. На рис. 6.36,а пунктиром показаны реальные характеристики двигателя
. Для больших значений диапазона изменения скорости необходимо корректировать полученные соотношения, учитывая падение напряжения на активном сопротивлении обмотки статора. На рис. 6.36,а пунктиром показаны реальные характеристики двигателя  при законе
при законе  .
.
Анализ работы АД при неизменной номинальной частоте проводится на основании Г-образной схемы замещения ( см. рис. 5.5), так как в этом случае  , причём
, причём  >>
>>  . Тогда и
. Тогда и  >>
>>  , т.е. падение напряжения на обмотке статора, обусловленное током намагничивания, пренебрежительно мало.
, т.е. падение напряжения на обмотке статора, обусловленное током намагничивания, пренебрежительно мало.
При частотном же регулировании в случае снижения  <
<  будет пропорционально снижаться и , тогда как значение
будет пропорционально снижаться и , тогда как значение  от частоты не зависит.В этих условиях со снижением частоты будет увеличиваться относительная величина падения напряжения на активном сопротивлении
от частоты не зависит.В этих условиях со снижением частоты будет увеличиваться относительная величина падения напряжения на активном сопротивлении  от тока намагничивания. Действительно,
от тока намагничивания. Действительно,  ,следовательно
,следовательно
 ,
,
где  - индуктивность контура намагничивания.
- индуктивность контура намагничивания.
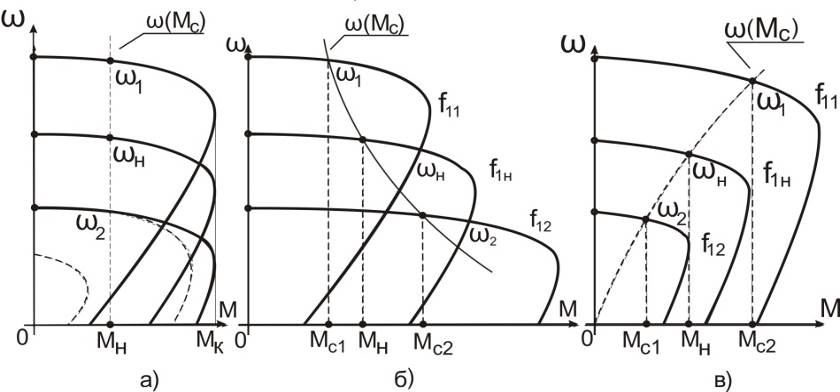
Рис. 6.36. Механические характеристики АД при частотном управлении и различном характере статической нагрузки (  )
)
Таким образом, при снижении частоты магнитный поток статора снижается за счёт падения напряжения  согласно уравнения равновесия статорной цепи (см. рис. 5.4) для Т - образной схемы замещения
согласно уравнения равновесия статорной цепи (см. рис. 5.4) для Т - образной схемы замещения
 ;
;
 .
.
Откуда магнитный поток
или
 (6.48)
(6.48)
заметно уменьшается в области малых частот, жёсткость механических характеристик снижается, критическое скольжение увеличивается , а критический момент  снижается ( см. рис. 6.36,а)
снижается ( см. рис. 6.36,а)
 ; (6.49)
; (6.49)
 . (6.50)
. (6.50)
Тогда коррекция закона  заключается в том, что в области относительно низких частот необходимо при уменьшении частоты
заключается в том, что в области относительно низких частот необходимо при уменьшении частоты  напряжения
напряжения  снижать в меньшей степени (нелинейный закон) ( см. рис 6.37), что применяется в разомкнутых системах со скалярным управлением и
снижать в меньшей степени (нелинейный закон) ( см. рис 6.37), что применяется в разомкнутых системах со скалярным управлением и  компенсацией.
компенсацией.
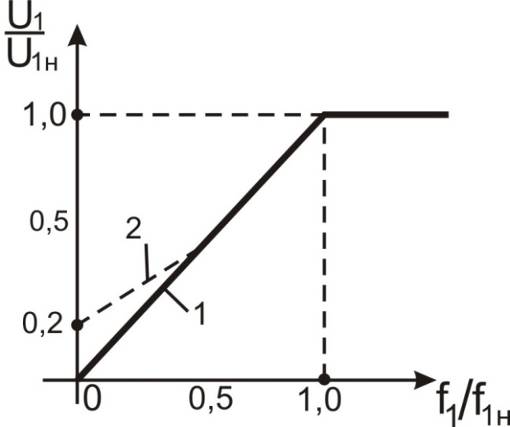
Рис. 6.37 Закон изменения напряжения источника переменной частоты при управлении АД: 1 – линейный закон  ; 2- нелинейный закон
; 2- нелинейный закон 
Дата добавления: 2019-02-08; просмотров: 1268;
Поиск по сайту
Узнать еще
- google_protectAndRun("ads_core.google_render_ad", google_handleError, google_render_ad); Великие географические открытия Запада и Востока ч.1
- II. Механические передачи
- II. Основные характеристики микроскопа.
- III. Биогеохимические циклы элементов и веществ (на примере основных биогенных элементов: углерод, азот, фосфор) и их количественные характеристики.
- III. Характеристики основных классов загрязняющих веществ в водной среде.
- SWOT- анализ: характеристики при оценке сильных, слабых сторон компании, ее возможностей и угроз
- XXVII. ОБЩИЕ ХАРАКТЕРИСТИКИ ГРИБОВ
- А параметр этого потока

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
