Классификация электроприводов
Классификация электроприводов производится по различным признакам. Разнообразные электроприводы с учётом их исторического развития и с точки зрения способа распределения механической энергии можно разделить на три основных типа: групповой, индивидуальный и взаимосвязанный.
Групповой электроприводобеспечивает движение нескольких рабочих машин или нескольких исполнительных механизмов (ИМ) рабочей машины. Передача механической энергии от одного двигателя к нескольким рабочим машинам и её распределение между ними производится с помощью трансмиссий. Такой групповой электропривод называют также трансмиссионным (рис. 1.2). Другая разновидность группового электропривода – это установка на каждую рабочую машину своего электродвигателя. Однако при этом сохраняется система распределения механической энергии внутри машины между исполнительными механизмами (рис. 1.3).
Для примера можно привести групповой электропривод рабочего рольганга, где от одного двигателя приводится во вращение N роликов через трансмиссию (редуктор и конические шестерни). А также групповой электропривод рабочих валков прокатной клети с использованием шестерённой клети и универсальных шпинделей.
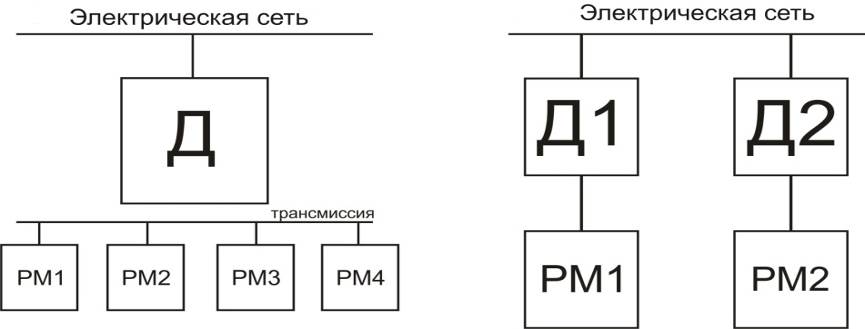
Рис. 1.2. Схема группового Рис.1.3. Схема группового
трансмиссионного ЭП электропривода
Вследствие своего технического несовершенства трансмиссионный электропривод в настоящее время практически не применяется, кроме группового электропривода по схеме на рис. 1.3.
Индивидуальный электроприводобладает существенными преимуществами перед групповым электроприводом: упрощается кинематическая схема привода, улучшаются условия безопасности труда, снижаются потери в трансмиссиях и передаточных устройствах, повышается надёжность работы, увеличивается быстродействие привода, создаются благоприятные условия для автоматизации работы рабочих машин и технологических комплексов. Индивидуальным является электропривод, в котором каждый ИМ рабочей машины приводится в движение от индивидуального двигателя, широко применяемый в различных современных машинах, например, в сложных металлорежущих станках, в прокатном производстве, конверторном производстве стали, бумагоделательных машин, в подъёмно-транспортных машинах, экскаваторах, роботах и т.п.
Взаимосвязанный электропривод содержит два или несколько электрически или механически связанных между собой электродвигателей или электроприводов, при работе которых поддерживается заданное соотношение или равенство скоростей или нагрузок, или положения ИМ рабочих машин. Необходимость в таком электроприводе часто возникает по конструктивным или техническим соображениям.
Примером взаимосвязанного электропривода может служить привод непрерывной группы валков прокатных клетей, связанных между собой через прокатываемый металл, где требуется постоянство соотношения скоростей клетей исходя из постоянства секундного объёма металла, проходящего через клети.
Другим примером взаимосвязанного электропривода является многодвигательный электропривод, в котором двигатели работают на один вал по соображениям дробления мощности двигателей, быстродействия, надежности и конструктивного исполнения. Например, электропривод скиповой лебёдки доменных печей.
Многообразие технологических процессов обуславливает и различные виды, и характеры движения ИМ рабочих машин, а, следовательно, электроприводов.
По виду движения электроприводы могут обеспечивать: вращательное однонаправленное движение, вращательное реверсивное и поступательное реверсивное движение. Вращательное движение осуществляется электродвигателями обычного исполнения. Поступательное движение может быть получено путём использования электродвигателя вращательного движения обычного исполнения совместно с преобразовательным механизмом (кулисным, винтовым, реечным и т.п.), либо применения электродвигателя специального исполнения для поступательного движения (так называемые линейные электродвигатели, магнитогидродинамические и др.).
По степени управляемости электроприводы могут быть:
1) нерегулируемые– работа ИМ рабочей машины с одной рабочей скоростью, координаты электропривода изменяются только из-за возмущающих воздействий;
2) регулируемые– работа ИМ рабочей машины происходит с различными значениями координат электропривода (скорости, момента, тока, магнитного потока) или параметров силовой цепи двигателя (сопротивления);
3) программно-управляемые – управляемый в соответствии с заданной программой, например, электропривод с числовым программным управлением металлорежущих станков;
4) следящие – автоматически отслеживающий перемещение ИМ рабочей машины с заданной точностью с произвольно меняющимся задающим сигналом;
5) адаптивные – автоматически избирающий параметры регуляторов при изменении условий работы рабочей машины с целью выработки оптимального режима, например, по быстродействию.
Можно классифицировать электроприводы по роду передаточного механизма:
1) редукторный– электродвигатель передаёт вращательное движение передаточному механизму, содержащему редуктор;
2) безредукторный.
По уровню автоматизации:
1) неавтоматизированный электропривод–с ручным управлением;
2) автоматизированный электропривод- автоматическое регулирование координат;
3) автоматический электропривод– управляющее воздействие вырабатывается автоматическим устройством без участия оператора.
Наконец, по роду тока применяются электроприводы постоянного и переменного тока.
Дата добавления: 2019-02-08; просмотров: 1874;
Поиск по сайту
Узнать еще
- II Классификация САSЕ-средств
- II. Классификация документов
- II.4. Классификация нефтей и газов по их химическим и физическим свойствам
- III. Классификация методов воспитания.
- III.1.3. ПРИЧИНЫ НАРУШЕНИЙ СЛУХА. ПСИХОЛОГО-ПЕДАГОГИЧЕСКАЯ КЛАССИФИКАЦИЯ НАРУШЕНИЙ СЛУХОВОЙ ФУНКЦИИ У ДЕТЕЙ
- III.2.3. ПРИЧИНЫ НАРУШЕНИЙ ЗРЕНИЯ. КЛАССИФИКАЦИЯ НАРУШЕНИЙ ЗРИТЕЛЬНОЙ ФУНКЦИИ У ДЕТЕЙ
- VI.2. Классификация месторождений нефти и газа
- VI.III. VI. Генетическая классификация складок.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
