Степени свободы движений
Число степеней свободы движений соответствует количеству возможных независимых линейных и угловых перемещений тела.
Тело, ничем не ограниченное в движениях (может двигаться в любом направлении), называется свободным. Движение свободного тела возможно в трех основных направлениях — вдоль осей координат, а также вокруг этих трех осей; оно имеет 6 степеней свободы движения (рис. 5, а).
Наложение связей уменьшает количество степеней свободы (табл. 1). Если закрепить одну точку тела, то сразу снимается 3 степени свободы: тело не сможет двигаться вдоль трех осей координат; у него останутся только возможности вращения вокруг этих осей, т. е. только три степени свободы (см. рис. 5, б). Так соединены кости трехосных (шаровидных) с у с т а в о в.
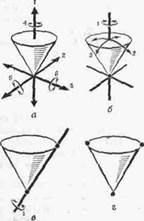
При закреплении двух точек в теле возможно вращение лишь вокруг линии (оси), проходящей через обе точки (см. рис. 5, в). Так соединены кости одноосных суставов, обеспечивающих одну степень свободы. Если же закреплены три точки (не лежащие на одной линии), то движения тела совсем невозможны (см. рис. 5, г). Та кое соединение неподвижно и, следовательно, не является суставом.
Как известно, двуосные суставы (эллипсовидный — лучезапястный, седловидный — первый запястно-пястный) обеспечивают вторую степень свободы благодаря неполному взаимному соответствию своих суставных поверхностей (неконгруэнтность). По этой же причине, если рука в локтевом суставе согнута, возможны приведение и отведение локтевой кости в плечелоктевом сочленении (например, при поворотах отвертки, штопора, ключа вокруг оси, проходящей вдоль второй пястной кости. в преобладающей части суставов тела человека 2 или 3 степени свободы. При нескольких степенях свободы движений (двух и более) возможно бесчисленное множество траекторий. Значит, в движениях в неодноосных суставах отсутствует определенность, задаваемаяспособом соединения. Тем более это характерно для цепей с несколькими неодноосными суставами.
Множество возможностей движений в суставах кинематической пары более чем с одной степенью свободы в отличие от технической пары требует для выполнения каждого определенного движения: а) выбор необходимой траектории, б) управления движением по траектории (направлением и величиной скорости) и в) регуляции движения, понимаемой как борьба с помехами, сбивающими с траектории (см. гл. IV).
Геометрия движений
Число основных осей сустава соответствует количеству степеней свободы движений одного звена относительно другого. Плоскость движения перпендикулярна оси вращения и характеризует направление перемещения звена. Размах движений — это угловое перемещение звена из одного крайнего положения в другое.
В суставном движении различают ось, плоскость и размах. Все пары звеньев связаны в суставах неразрывно, как в шарнирах, поэтому они могут двигаться в основном только вокруг осей (не считая незначительного скольжения). Однако не существует суставов совершенно правильной геометрической формы. А если бы даже такие и были, то при сдавливании гиалиновых суставных хрящей форма суставных поверхностей нарушалась бы. Следовательно, геометрические оси вращения не постоянны и правильнее говорить о мгновенных осях вращения. В связи с этим количество осей в суставе означает в биомеханическом смысле только количество степеней свободы движения, а не постоянных геометрических осей вращения.
Продольные оси звеньев чаще всего не строго перпендикулярны геометрическим осям вращения. Поэтому различные точки звеньев движутся в плоскостях, параллельных друг другу, а сама продольная ось звена описывает поверхности, близкие к коническим. Таким образом, плоскость движения в суставе характеризует, в какой плоскости движутся точки звена. Она перпендикулярна геометрической оси вращения и не обязательно совпадает с плоскостью движения продольной оси самого звена.
Размахом движений измеряется подвижностьв каждом отдельном суставе1. Наибольший размах бывает в пассивных движениях; с увеличением внешней нагрузки (вес отягощения, силы инерции) растягиваются мягкие ткани-ограничители. Размах же в активном движении меньше, чем в пассивном, так как там мышцы имеют предел силы, в то время как величина внешних сил не ограничена. К тому же сила собственных мышц пары звеньев приложена невыгодно при крайних положениях звеньев в суставе.
Подвижностью соседних звеньев в соединениях каждой пары обусловлена гибкость всей кинематической цепи в целом. Гибкость цепи (например, позвоночника) измеряется общим размахом движения концевого звена относительно другого конца цепи.
Общий размах движения в целомбываетменьше суммы размахов изолированных движений в суставах, так как вследствие пассивной недостаточности многосуставных мышц возникают дополнительные связи.
ЗВЕНЬЯ КАК РЫЧАГИ
Скелет, составленный из подвижно соединенных костей, представляет собой твердую основу биокинематических цепей. Звенья цепей с приложенными к ним силами (мышечной тяги и др.) в биомеханике рассматриваются как система составных рычагов.
3.1. Виды рычагов в теле человека
Рычаг — твердое тело, которое может под действием приложенных сил вращаться вокруг опоры (оси) в двух противоположных направлениях, а также сохранять свое положение.
Как простейший механизм, рычаг служит для передачи движения и силы на расстояние.
Каждый рычаг имеет точку опоры — ось рычага (О на рис. 6), точки (А, В) приложения двух взаимно противодействующих сил (G и Q). Чтобы определить расстояние до места приложения сил от оси рычага, измеряют плечи рычага (О А и 0В). Чтобы определить расстояния до направления действия сил от оси рычага, измеряют плечи сил {а. и k — перпендикуляры, опущенные из точки О на линии действия сил, т. е. их направления).
Рычаги бывают о д н о п л еч и е (с точкой опоры на конце рычага — см. рис. 6,а)и двуплечие(с точкой опоры между концами рычага — см. рис. 6, б). Принципиальной разницы в отношении работы сил между ними нет: поворачивая плечо двуплечего рычага вокруг точки О из положения do в di, затем da, можно перейти к рычагу одноплечему (см. рис.6, б). У нового, одноплечего, рычага иная форма, но те же свойства, что и у прежнего, двуплечего, рычага.
Звенья тела человека имеют в своей основе костные рычаги. Двуплечие рычаги используются, например, при сохранении положения стоя, а одноплечие — в быстрых движениях конечностей. Одно и то же звено для разных мышц может быть то одноплечим, то двуплечим рычагом.
Дата добавления: 2020-07-18; просмотров: 937;
Поиск по сайту
Узнать еще
- F44.4 - F44.7 Диссоциативные расстройства движений и ощущений
- IV. Степени качества наречий
- VIII. По степени коммерциализации.
- Академические свободы и автономия вуза
- АНГЛИЙСКАЯ КОНЦЕПЦИЯ СВОБОДЫ ПЕЧАТИ
- Биомеханическая оценка движений нижнего шейного отдела
- БИОМЕХАНИЧЕСКИЙ КОНТРОЛЬ. КЛИНИЧЕСКИЙ АНАЛИЗ ДВИЖЕНИЙ. ТЕСТЫ В БИОМЕХАНИКЕ. МЕТОДЫ ОБСЛЕДОВАНИЯ
- В зданиях и сооружениях I степени огнестойкости применяют только несгораемые строительные материалы. Конструкции имеют предел огнестойкости 0,5-2,5 часа.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
