Механические свойства мышц
Упругость проявляется в возникновении напряжения в мышце при ее деформации под действием нагрузки. Вязкость— в замедлении деформации внутренними силами (жидким трением, молекулярными силами).
На графике «длина — напряжение», полученном на изолированной мышце экспериментально (рис. 7, а), удобно рассмотретьупругостьмышцы. Здесь видно, как по мере увеличения нагрузки мышца удлиняется и как при этом растет ее напряжение. Отсюда следует:
1) нагрузка (Р) растягивает мышцу, удлиняя ее (на Dl), т. е. для растягивания мышцы необходимо приложить силу;
2) по мере удлинения мышцы (на Dl) ее напряжение увеличивается (на DF); следовательно, чтобы вызвать напряжение мышцы (без дополнительного возбуждения), необходимо ее растянуть;
3) приложенная нагрузка (Р) определяет величину напряжения мышцы (F); таким образом, чтобы получить большое напряжение, надо приложить большую нагрузку (сопротивление тяге мышцы) — действие равно противодействию;
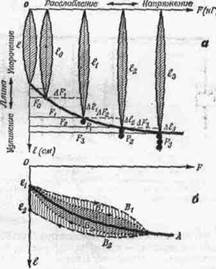
Рис.7. Графики «длина—напряжение»мышцы:
а — проявление упругости (зависимость деформации и напряжения от нагрузки); б — проявление вязкости («петли гистерезиса») (ориг.)
4) упругость мышцы нелинейна ( Dl2 больше Dl3 при равных DF2 и DF3); следовательно, по мере значительного растягивания одинаковые приращения длины мышцы дают все большие приращения напряжения;
5) при отсутствии нагрузки длина мышцы (l) является наименьшей («свободная длина» мышцы) — нерастянутая мышца не напряжена;
6) в условиях организма длина мышцы (/о) больше «свободной длины» и мышца несколько напряжена, т. е. всегда обладает «тонусом» покоя (F0).
Таковы особенности упругих свойств невозбужденной мышцы.
Вязкость мышцы как причину запаздывания деформации можно наблюдать по отклонению графика действительной деформации от линии зависимости «длина — напряжение» в установившемся состоянии (см. рис. 7, б— линия A). При меньшей вязкости (линии Б) изменение длины отстает от изменения напряжения как при растягивании мышцы (£i), так и при ее сокращении (Бz). В этом случае мышца, хотя и не сразу, но все же возвратилась к исходному состоянию (точка l3). При большей вязкости (линии В) замедление еще больше и мышца не возвратилась к прежнему состоянию (точка l3) — обнаружилась остаточная деформация (расстояние l3 — l1).
Полученные кривые (Б, В) образуют так называемые «петли гистерезиса», характеризующие запаздывание процесса деформации из-за тормозящего действия вязкости. При этом неизбежна потеря энергии. Она пропорциональна площади, ограниченной петлей гистерезиса (косая штриховка для Б1—Бz и вертикальная—для B1—Вz)- Действительно, площадь, определяемая произведением силы (напряжение) и пути (изменение длины), равна работе, затраченной на преодоление вязкости.
Ползучесть — это свойство мышцы изменять с течением времени соотношение «длина — напряжение»: нагруженная (напряженная) мышца имеет соответствующую длину; через некоторое время при тех же нагрузках и напряжении эта длина увеличивается.
Релаксациязаключается в том, что растянутая мышца, сохраняя длину, постепенно с течением времени уменьшает свое напряжение, расслабляется.
Совокупность этих механических свойств (упруговязких, ползучести и релаксации) во всевозможных сочетаниях в различных условиях, в сущности, и есть то, что называется эластичностью1мышцы.
Высокоэластичной мышце свойственны значительная растяжимость, большая жесткость при большом растягивании (нелинейная упругость) и малые потери энергии (небольшая вязкость) при деформациях. И хотя механизм, обеспечивающий названные свойства, еще неполностью объяснен, их проявления очень важно учитывать при изучении способов повышения эффективности действия мышц в движениях.
Режимы работы мышц
Режим работы мышцы определяется изменением либо еедлины,либо ее напряжения, либо того и другого одновременно.
Возбудимость мышцы проявляется в изменении как ее напряжения, так и механических свойств — упругости, вязкости и др. В результате возбуждения химическая энергия в мышце превращается в механическую. Возбужденная мышца при той же нагрузке и напряжении имеет меньшую длину — не меняя своего напряжения, она сокращается.

Мышца не возбуждена Мышца не возбуждена
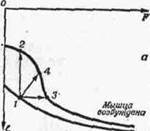
Рис. 9. Работа мышцы:
а — проявление возбуждения: режимы — изотонический (1—2), изометрический (1—3), ауксотонический (1—4); б — проявление вязкости мышцы (орг.)
Свойство сократимостиудобно разобрать на графиках «длина — напряжение» невозбужденной и максимально возбужденной мышц (рис. 9, а). Вся кривая, относящаяся к максимально возбужденной мышце, расположена выше, чем кривая покоющейся.
Следовательно, при равной величине напряжения длина возбужденной мышцы меньше.
Кривые, полученные при разных степенях возбуждения мышц, занимают промежуточное положение между упомянутыми крайними случаями. Можно этот же график разобрать иначе: точки кривой максимально возбужденной мышцы расположены правее (например, точки1и 3) точек графика покоющейся мышцы, имеющей ту же длину.
Значит, при одной и той же длине мышца, будучи возбужденной, напряжена больше, чем в состоянии покоя.
Если в подготовительном движении (например, замах, подседание) мышца перед сокращением растягивается, то она тормозит движение; кинетическая энергия тормозимого звена переходит в потенциальную энергию упругой деформации мышцы. Теперь растянутая мышца напряжена; в ней накоплена потенциальная энергия упругой деформации. С началом активного движения при возбуждении мышцы в ней образуется механическая энергия напряжения, освобождаемая при биохимической реакции.
Вся биопотенциальная энергия мышцы состоит из превращенной биохимической и упругой механической.
Преобразование всей биопотенциальной энергии мышцы в механическую (кинетическую) по-разному проявляется в различных условиях работы мышцы. Линия перехода па графике от точки 1 к точке 2 изображает сокращение мышцы в изотоническом режиме (без изменения напряжения — см. рис. 9, а). В реальных движениях в живом организме такой режим вряд ли может встретиться. При движениях изменяются моменты сил мышечной тяги, а также других сил, поскольку изменяются углы их приложения, а у мышц — и их длина. Сохранять величину напряжения мышцы в этих условиях практически невозможно, да это и не нужно.
Линия перехода на графике от точки 1 к точке 3 изображает увеличение напряжения мышцы при ее работе в изометрическом режиме. Например, при непреодолимых препятствиях длина мышцы не изменяется, однако напряжение ее вследствие возбуждения увеличивается. Это случай «статической работы» мышц при сохранении положения тела (см. гл. VI).
Для работы мышц человека при движениях обычен так называемый ауксотонический режим1(например, линия перехода на графиках от точки 1 к точке 4), связанный с изменением и длины, и напряжения мышцы. Этот режим правильнее было бы называть «ауксоническим», учитывая, что изменяется не только напряжение, но и длина мышцы.
На графиках реальных движений все рассмотренные переходы происходят не по прямым линиям, так как вязкость замедляет деформацию. На рис. 9, б представлены петли гистерезиса при возбуждении ранее нагруженной мышцы (/—2), при дополнительной нагрузке возбужденной мышцы {2—3) и после снятия возбуждения при ее разгрузке {4—I}. Заштрихованные участки соответствуют потерям энергии на преодоление вязкости. Считают, что вязкость мышц увеличивается при быстрых движениях и при значительном возбуждении, т. е. как раз в условиях соревновательной борьбы спортсмена. Однако разогревание мышц при разминке снижает вязкость, уменьшает торможение при сокращении и растягивании мышц. Следовательно, на соревнованиях и тренировках важно для снижения вязкости сохранять в разогретых мышцах тепло.
Дата добавления: 2020-07-18; просмотров: 1145;
Поиск по сайту
Узнать еще
- ОСНОВНЫЕ ТИПЫ И СВОЙСТВА НАПОЛЬНЫХ И БОРТОВЫХ СИСТЕМ ТЕХНИЧЕСКОГО ДИАГНОСТИРОВАНИЯ
- I. Товар и его свойства.
- II. Механические передачи
- II.3. Физико-химические свойства нефтей и природных газов
- II.4. Классификация нефтей и газов по их химическим и физическим свойствам
- X. Электроповерхностные свойства дисперсных систем
- А) Определяется механическими и тепловыми свойствами
- А. Механические методы

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
