Определение скорости точки при задании в криволинейных координатах. Пример.
Скорость точки М при задании ее движения в криволинейных координатах определится в виде векторной суммы составляющих скоростей, параллельных координатным осям:  . Проекции скорости на соответствующие координатные оси равны:
. Проекции скорости на соответствующие координатные оси равны:  . Модуль скорости в ортогональной криволинейной системе координат можно рассчитать по зависимости:
. Модуль скорости в ортогональной криволинейной системе координат можно рассчитать по зависимости:  . В приведенных формулах значения производных и коэффициентов Ламе вычисляют для текущего положения точки М в пространстве.
. В приведенных формулах значения производных и коэффициентов Ламе вычисляют для текущего положения точки М в пространстве.
Пример (может быть и не это): Скорость в сферической системе координат.
Координатами точки в сферической системе координат являются скалярные параметры r, "фи", "тета", отсчитываемые так, как показано на рис. Система уравнений движения точки в данном случае имеет вид: 
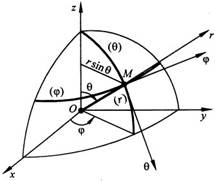
На рис. изображены радиус-вектор r, проведенный из начала координат, углы "фи" и "тета", а также координатные линии и оси рассматриваемой системы в произвольной точке М траектории. Видно, что координатные линии ("фи") и ("тета") лежат на поверхности сферы радиусом r. Данная криволинейная система координат также является ортогональной. Ее оси Mr, М("фи") и М("тета") и соответствующие им единичные векторы er, e("фи"), е("тета"), определяютщие положительные напревления осей, взаимно перпендикулярны. Декартовы координаты могут быть выражены через криволинейные координаты так:  . Тогда коэффициент Ламе:
. Тогда коэффициент Ламе:  ; проекции скорости точки на оси сферической системы координат
; проекции скорости точки на оси сферической системы координат  , а модуль
, а модуль  .
.
Дополнение:
Движение точки в пространстве можно считать заданным, если известны законы изменнеия трех ее декартовых координат x, y, z как функции времени. Однако в некоторых случаях пространственного движения материальных точек (например, в областях, ограниченных поверхностями различной формы) использование уравнений движения в декартовых координатах неудобно, так как они становятся слишком громоздкими. В таких случаях можно выбрать другие три независимых скалярных параметра q1, q2, q3, называемых криволинейными, илиобобщенными координатами, которые также однозначно определяют положение точки в пространстве.
Положительные направления координатных осей задаются единичными векторами, которые называются базисами. Они определяются через частные производные от радиус-вектора точки по i-ой обобщенной координате в данной точке M:  . Здесь
. Здесь  - параметр, который называется i-ым коэффициентом Ламе и равен значению модуля частной производной от радиус-вектора точки по i-ой криволинейной координате, вычисленной в данной точке М. Каждый из векторов ei имеет направление, соответствующее направлению движения точки конца радиус-вектора riM при возрастанийй i-ой обобщенной координаты.
- параметр, который называется i-ым коэффициентом Ламе и равен значению модуля частной производной от радиус-вектора точки по i-ой криволинейной координате, вычисленной в данной точке М. Каждый из векторов ei имеет направление, соответствующее направлению движения точки конца радиус-вектора riM при возрастанийй i-ой обобщенной координаты.
Проекции ускорения точки М на оси криволинейной системы координат определяют по формуле:  . Ускорение точки при задании ее движения в криволинейных координатах определится в виде векторной суммы составляющих ускорений, параллельных осям этой системы координат,
. Ускорение точки при задании ее движения в криволинейных координатах определится в виде векторной суммы составляющих ускорений, параллельных осям этой системы координат,  , где aqi - проекции ускорения на оси, определяемые по формуле:
, где aqi - проекции ускорения на оси, определяемые по формуле:  , i=1,3. Модуль ускорения в ортогональной криволинейной системе координат вычисляется по формуле:
, i=1,3. Модуль ускорения в ортогональной криволинейной системе координат вычисляется по формуле:  .
.
Проекции ускорения на оси сферической системы координат  ,а модуль
,а модуль  .
.
Дата добавления: 2018-11-26; просмотров: 1945;
Поиск по сайту
Узнать еще
- A. Узагальнені координати і узагальнені швидкості та прискорення
- API как средство интеграции приложений.
- C04 ППВ с комментариями и примерами
- Cыры, созревающие при участии слизи.
- F00 Деменция при болезни Альцгеймера
- F50 Расстройства приема пищи
- F51 Расстройства сна неорганической природы
- F63 Расстройства привычек и влечений

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
