Регулирование частоты вращения
Современный электропривод развивается в направлении расширения применения регулируемых и автоматизированных приводов, с помощью которых решаются новые технологические задачи, повышается точность обработки изделий, увеличивается производительность оборудования. Асинхронные двигатели составляют более 50% по мощности и более 80% по количеству используемых двигателей в мире и их доля в новых разработках постоянно увеличивается.
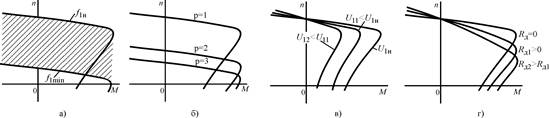 Наиболее совершенным способом управления асинхронными двигателями является частотное управление. Оно осуществляется с помощью электронных преобразователей частоты (ПЧ). Вход ПЧ подключается к однофазной или трехфазной сети переменного тока, а на его выходе формируется система трехфазных переменных напряжений или токов, амплитуда и частота которых задается соответствующими сигналами управления. Коэффициент полезного действия современных ПЧ составляет0,8-0,9. Они изготавливаются на мощности двигателей от десятков ватт до сотен киловатт. Регулирование выходной частоты происходит плавно в диапазоне до 1:100, а при установке соответствующих датчиков и до нескольких тысяч. Механические характеристики при частотном управлении при снижении частоты смещаются параллельно, заполняя непрерывно всю область между номинальной и минимальной частотой (рис. а)).
Наиболее совершенным способом управления асинхронными двигателями является частотное управление. Оно осуществляется с помощью электронных преобразователей частоты (ПЧ). Вход ПЧ подключается к однофазной или трехфазной сети переменного тока, а на его выходе формируется система трехфазных переменных напряжений или токов, амплитуда и частота которых задается соответствующими сигналами управления. Коэффициент полезного действия современных ПЧ составляет0,8-0,9. Они изготавливаются на мощности двигателей от десятков ватт до сотен киловатт. Регулирование выходной частоты происходит плавно в диапазоне до 1:100, а при установке соответствующих датчиков и до нескольких тысяч. Механические характеристики при частотном управлении при снижении частоты смещаются параллельно, заполняя непрерывно всю область между номинальной и минимальной частотой (рис. а)).
Такое же смещение, но дискретно можно получить путем применения специальных много скоростных двигателей, у которых можно переключать обмотки статора, изменяя число пар полюсов p. При этом синхронная скорость вращения изменяется обратно пропорционально p (рис. б)). Этот способ является наиболее простым и доступным, но обладает очень ораниченными возможностями.
Управлять частотой вращения можно также изменяя напряжение питания. При этом максимальный момент уменьшается пропорционально  , а критическое скольжение остается постоянным. Этот способ имеет очень низкий КПД. Кроме того, при снижении напряжения питания резко снижается перегрузочная способность двигателя. Поэтому его можно использовать только в замкнутых системах управления для машин малой мощности. Однако с широким распространением электронных преобразователей частоты этот способ утратил свое значение и в настоящее время практически не применяется.
, а критическое скольжение остается постоянным. Этот способ имеет очень низкий КПД. Кроме того, при снижении напряжения питания резко снижается перегрузочная способность двигателя. Поэтому его можно использовать только в замкнутых системах управления для машин малой мощности. Однако с широким распространением электронных преобразователей частоты этот способ утратил свое значение и в настоящее время практически не применяется.
Последним способом управления асинхронными двигателями является способ изменения сопротивления цепи ротора. Этот способ может использоваться только в двигателях с фазным ротором, но для машин этого типа он является основным. Достоинством способа является простота и возможность регулирования скорости в пределах. 1:10 с сохранением перегрузочной способности двигателя. При изменении добавочного сопротивления максимальный момент остается постоянным, а изменяется критическое скольжение вплоть до 1,0. Недостатками его являются большие потери в добавочном сопротивлении, мягкие искусственные механические характеристики и относительно небольшой диапазон регулирования.
Дата добавления: 2016-06-29; просмотров: 2114;
Поиск по сайту
Узнать еще
- I.3.4 ВЗАИМНЫЕ ПРЕВРАЩЕНИЯ ЖИДКОСТЕЙ И ГАЗОВ
- VI. Гемецеллюлозы и их превращения.
- VII. Регулирование частоты вращения двигателя
- Автоматизированный асинхронный электропривод с использованием синхронных электромашинных преобразователей частоты.
- Автоматизированный электропривод переменного тока с непосредственным преобразованием частоты (НПЧ).
- АВТОМАТИЧЕСКАЯ подстройка частоты гетеродина
- Автоматическое регулирование (РОУ) редукционно-охладительных установок.
- Автоматическое регулирование в области дуговой сварки

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
