Электромагнитный момент и механическая характеристика
Электромагнитный момент асинхронной машины создается в результате взаимодействия тока в обмотке ротора с вращающимся магнитным полем. Связь между моментом и скоростью вращения ротора можно получить из уравнения механической мощности. Если в него подставить выражение для тока ротора, то с учетом того, что угловая частота вращения равна  ,получим
,получим
Все величины, входящие в это выражение константы, кроме скольжения s. Взяв производную  и приравнивая ее нулю, найдем экстремумы функции
и приравнивая ее нулю, найдем экстремумы функции  . Они наступают при критическом скольжении
. Они наступают при критическом скольжении  . К приближенному равенству для критического скольжения можно перейти с учетом того, что
. К приближенному равенству для критического скольжения можно перейти с учетом того, что  . Подставляя критическое скольжение в выражение , получим значение максимального момента
. Подставляя критическое скольжение в выражение , получим значение максимального момента
 . Знак плюс в этих выражениях соответствует двигательному режиму, а минус – генераторному.
. Знак плюс в этих выражениях соответствует двигательному режиму, а минус – генераторному.
Из выражения для  следует, что максимальный момент в генераторном режиме больше, чем в двигательном. Однако, пренебрегая
следует, что максимальный момент в генераторном режиме больше, чем в двигательном. Однако, пренебрегая  также, как это было сделано для
также, как это было сделано для  , мы получим упрощенное выражение для максимального момента более удобное для качественного анализа –
, мы получим упрощенное выражение для максимального момента более удобное для качественного анализа –
 .
.
Полагая  в выражении , получим выражение для пускового момента асинхронного двигателя
в выражении , получим выражение для пускового момента асинхронного двигателя
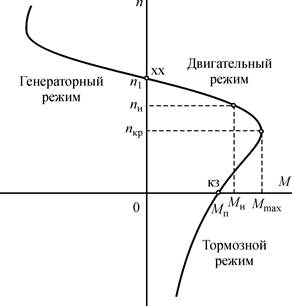
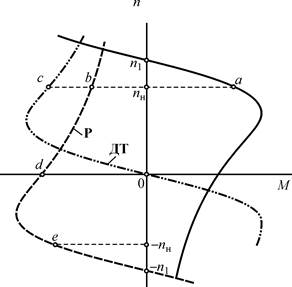
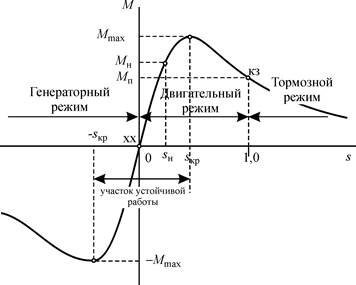 Полученная зависимость представлена на рисунке. Точка
Полученная зависимость представлена на рисунке. Точка  соответствует идеальному холостому ходу машины. Этот режим может быть получен только за счет внешнего вращающего момента.Точка
соответствует идеальному холостому ходу машины. Этот режим может быть получен только за счет внешнего вращающего момента.Точка  соответствует пусковому режиму или режиму короткого замыкания. Устойчивая работа машины возможна только в пределах скольжений от
соответствует пусковому режиму или режиму короткого замыкания. Устойчивая работа машины возможна только в пределах скольжений от  до
до  , т.к. вне этого участка при увеличении скольжения момент двигателя уменьшается, что приводит к дальнейшему увеличению скольжения (снижению скорости) и этот процесс будет развиваться до полной остановки двигателя. Переход на участок неустойчивой работы называется "опрокидыванием" двигателя. Это происходит, если момент нагрузки больше или равен максимальному, поэтому максимальный момент называют также опрокидывающим.
, т.к. вне этого участка при увеличении скольжения момент двигателя уменьшается, что приводит к дальнейшему увеличению скольжения (снижению скорости) и этот процесс будет развиваться до полной остановки двигателя. Переход на участок неустойчивой работы называется "опрокидыванием" двигателя. Это происходит, если момент нагрузки больше или равен максимальному, поэтому максимальный момент называют также опрокидывающим.
Номинальный режим работы двигателя соответствует скольжению  . Отношение
. Отношение  называется перегрузочной способностью. Превышение максимального момента над номинальным является необходимым условием надежной работы двигателя.
называется перегрузочной способностью. Превышение максимального момента над номинальным является необходимым условием надежной работы двигателя.
Если за счет внешнего вращающего момента вал двигателя раскручивается до скорости выше синхронной  , то скольжение становится отрицательным и машина переходит в генераторный режим.
, то скольжение становится отрицательным и машина переходит в генераторный режим.
При скольжениях  скорость вращения будет отрицательной, т.е. ротор двигателя будет вращаться в направлении противоположном направлению вращения магнитного поля и машина перейдет в тормозной режим или режим противовключения.
скорость вращения будет отрицательной, т.е. ротор двигателя будет вращаться в направлении противоположном направлению вращения магнитного поля и машина перейдет в тормозной режим или режим противовключения.
На рисунке для наглядности критическое скольжение составляет около 0,5. Такие значения в реальных машинах нормального исполнения не бывают. Они находятся в пределах от 0,1 до 0,02, причем меньшие значения соответствуют машинам большей мощности. Поэтому рабочий участок характеристики практически линейный и может быть заменен прямой  .
.
Выражение не позволяет анализировать свойства характеристики в общем виде. Однако, если его разделить на , то получится удобное выражение в относительных единицах, называемое по имени автора формулой Клосса
 .
.
 В теории электрических машин и электропривода вместо характеристики принято пользоваться механической характеристикой. Механическая характеристика двигателя это зависимость скорости вращения от момента нагрузки на валу, т.е.
В теории электрических машин и электропривода вместо характеристики принято пользоваться механической характеристикой. Механическая характеристика двигателя это зависимость скорости вращения от момента нагрузки на валу, т.е.  . Эту характеристику легко можно получить из характеристики , если учесть, что
. Эту характеристику легко можно получить из характеристики , если учесть, что  , т.е. она получается смещением оси момента в точку и изменением масштаба оси скольжений. При этом в новой системе координат режимы работы машины (генераторный, двигательный и тормозной) оказываются в различных квадрантах плоскости
, т.е. она получается смещением оси момента в точку и изменением масштаба оси скольжений. При этом в новой системе координат режимы работы машины (генераторный, двигательный и тормозной) оказываются в различных квадрантах плоскости  , а режимы холостого хода и короткого замыкания – в точках пересечения механической характеристики с осями координат.
, а режимы холостого хода и короткого замыкания – в точках пересечения механической характеристики с осями координат.
Линеаризованная механическая характеристика рабочего участка примет вид
Пуск двигателя
Пуск двигателей является тяжелым режимом, сопровождающимся повышенными нагрузками на электрическую цепь машины, а также на трансмиссию и механизм приводимый во вращение. Поэтому при пуске обычно ставится задача снижения токов и вращающего момента двигателя и/или скорости их изменения. В асинхронных двигателях нормального исполнения пусковой момент лишь незначительно больше номинального и при большом моменте инерции нагрузки возникает необходимость его повышения.
 На практике используются способы прямого пуска; пуска с пониженным напряжением питания и пуска с изменением сопротивления ротора.
На практике используются способы прямого пуска; пуска с пониженным напряжением питания и пуска с изменением сопротивления ротора.
Для двигателей с короткозамкнутым ротором возможны только первые два способы пуска.
Прямой пуск или пуск непосредственным включением в сеть осуществляют замыканием выключателя (рис 1. а)). В первый момент времени ток статора в 5-7 раз превосходит номинальное значение. Поэтому такой способ применяют только для двигателей малой мощности.
Уменьшение пускового тока достигается понижением напряжения с помощью сопротивлений или реакторов (индуктивностей), включаемых последовательно в цепи обмоток статора (рис.1 б) и в)), переключением соединения обмоток звезда-треугольник (рис.1 д)) и понижением напряжения с помощью автотрансформаторов (рис.1 г)). При всех этих способах в начале пуска понижается напряжение на статоре двигателя, а затем он включается на полное напряжение. Расчет активных сопротивлений и сопротивления  реакторов, а также напряжения автотрансформаторов производится из условия ограничения тока статора до допустимого значения. Однако следует иметь в виду, что пусковой момент уменьшается пропорционально
реакторов, а также напряжения автотрансформаторов производится из условия ограничения тока статора до допустимого значения. Однако следует иметь в виду, что пусковой момент уменьшается пропорционально  , поэтому при этих способах могут возникнуть проблемы с разгоном двигателя, особенно при больших моментах инерции нагрузки. Переключение обмоток со звезды на треугольник соответствует уменьшению напряжения при пуске в
, поэтому при этих способах могут возникнуть проблемы с разгоном двигателя, особенно при больших моментах инерции нагрузки. Переключение обмоток со звезды на треугольник соответствует уменьшению напряжения при пуске в  раз, что вызывает трехкратное уменьшение пускового момента.
раз, что вызывает трехкратное уменьшение пускового момента.
Двигатели с фазным ротором позволяют регулировать процесс пуска изменением добавочных сопротивлений  , включаемых в цепь ротора (рис.2 а). Изменение добавочного сопротивления не влияет на величину максимального момента двигателя и вызывает только изменение критического скольжения. При условии
, включаемых в цепь ротора (рис.2 а). Изменение добавочного сопротивления не влияет на величину максимального момента двигателя и вызывает только изменение критического скольжения. При условии  пусковой момент будет равен максимальному. Пуск двигателя с фазным ротором производят при ступенчатом или плавном изменении добавочного сопротивления (рис.2 б)). Вначале его значение устанавливают в соответствии с условием максимума и разгон начинается из точки 1 в точку 2, где сопротивление уменьшается и момент скачком увеличивается при переходе двигателя на новую механическую характеристику, соответствующую новому значению сопротивления ротора. Разгон продолжается из точки 3 в точку 4, где снова изменяется сопротивление цепи ротора. В точке 4 оно замыкается накоротко и двигатель переходит на естественную механическую характеристику в точку 5 и разгоняется долее до рабочей точки 6. Таким образом, пуск двигателя с фазным ротором происходит с уменьшением сопротивления ротора по мере разгона.
пусковой момент будет равен максимальному. Пуск двигателя с фазным ротором производят при ступенчатом или плавном изменении добавочного сопротивления (рис.2 б)). Вначале его значение устанавливают в соответствии с условием максимума и разгон начинается из точки 1 в точку 2, где сопротивление уменьшается и момент скачком увеличивается при переходе двигателя на новую механическую характеристику, соответствующую новому значению сопротивления ротора. Разгон продолжается из точки 3 в точку 4, где снова изменяется сопротивление цепи ротора. В точке 4 оно замыкается накоротко и двигатель переходит на естественную механическую характеристику в точку 5 и разгоняется долее до рабочей точки 6. Таким образом, пуск двигателя с фазным ротором происходит с уменьшением сопротивления ротора по мере разгона.
 Этот же принцип используется в короткозамкнутых двигателях с улучшенными пусковыми свойствами. Улучшение свойств достигается использованием эффекта вытеснения тока ротора. На рисунке 3 показан паз ротора и сечение его стержня. Нижняя часть стержня сцепляется (охватывается) всеми линиями магнитного поля, а по мере перемещения вверх, число линий сцепляющихся с элементами стержня уменьшается. Соответственно уменьшается и индуктивное сопротивление вышележащих слоев стержня. Поэтому ток распределяется по сечению стержня неравномерно. Плотность его j минимальна в глубоких слоях и максимальна в верхних. Этот эффект зависит от частоты тока в стержне и проявляется тем сильнее, чем выше частота. Поэтому при пуске, когда частота тока максимальна и равна частоте сети стержень обладает высоким эквивалентным сопротивлением, а в процессе разгона ток перераспределяется по всему сечению и сопротивление уменьшается. Таким образом, в двигателях, в которых используется эффект вытеснение тока реализуется система автоматического управления сопротивлением ротора. К числу двигателей с улучшенными пусковыми свойствами относятся глубокопазные двигателя и двигатели с двойной беличьей клеткой.
Этот же принцип используется в короткозамкнутых двигателях с улучшенными пусковыми свойствами. Улучшение свойств достигается использованием эффекта вытеснения тока ротора. На рисунке 3 показан паз ротора и сечение его стержня. Нижняя часть стержня сцепляется (охватывается) всеми линиями магнитного поля, а по мере перемещения вверх, число линий сцепляющихся с элементами стержня уменьшается. Соответственно уменьшается и индуктивное сопротивление вышележащих слоев стержня. Поэтому ток распределяется по сечению стержня неравномерно. Плотность его j минимальна в глубоких слоях и максимальна в верхних. Этот эффект зависит от частоты тока в стержне и проявляется тем сильнее, чем выше частота. Поэтому при пуске, когда частота тока максимальна и равна частоте сети стержень обладает высоким эквивалентным сопротивлением, а в процессе разгона ток перераспределяется по всему сечению и сопротивление уменьшается. Таким образом, в двигателях, в которых используется эффект вытеснение тока реализуется система автоматического управления сопротивлением ротора. К числу двигателей с улучшенными пусковыми свойствами относятся глубокопазные двигателя и двигатели с двойной беличьей клеткой.
Торможение
Тормозные режимы могут возникать в двигателях при определенных условиях работы или создаваться искусственно для ускорения процесса остановки.
Торможение может быть генераторным с отдачей энергии в сеть, противовключением и динамическим.
 Генераторный режим асинхронной машины возникает когда ротор начинает вращаться со скоростью выше синхронной. При этом ЭДС статора
Генераторный режим асинхронной машины возникает когда ротор начинает вращаться со скоростью выше синхронной. При этом ЭДС статора  становится больше напряжения сети
становится больше напряжения сети  , ток меняет фазу на 180° и электромагнитный момент меняет знак на противоположный, противодействуя вращению ротора. Генераторное торможение может возникать за счет действия нагрузки на вал двигателя.
, ток меняет фазу на 180° и электромагнитный момент меняет знак на противоположный, противодействуя вращению ротора. Генераторное торможение может возникать за счет действия нагрузки на вал двигателя.
Чаще возникает задача быстрой остановки ротора. Она реализуется переключением порядка следования фаз обмотки статора. При этом магнитное поле начинает вращаться в противоположную сторону и двигатель переходит в режим реверса. Ему соответствует механическая характеристика Р (см. рисунок), представляющая собой естественную характеристику развернутую на 180° . Переключение любых двух выводов статорных обмоток приведет к скачкообразному переходу из точки a в точку b на новой характеристике, затем снижению скорости до точки d. Если в момент остановки ротора не отключить питание статора, то двигатель начнет разгоняться в противоположную сторону и придет в статическое состояние в новой рабочей точке e.
Динамическое торможение осуществляется путем подключения одной, двух или трех обмоток статора к источнику постоянного тока. В этом режиме двигатель имеет механическую характеристику, проходящую через начало координат (характеристика ДТ на рис.). Таким образом, при отключении двигателя от сети переменного тока и подключении к сети постоянного тока рабочая точка переместится вначале в точку c, а затем по характеристике ДТ в точку остановки в начале координат.
Дата добавления: 2016-06-29; просмотров: 4533;
Поиск по сайту
Узнать еще
- Andante cantabile С. Рахманинов. Музыкальный момент op. 16, № 3
- Cравнительная характеристика усилителей на БТ
- I. Загальна характеристика
- I.3.3 МЕХАНИЧЕСКАЯ ЭНЕРГИЯ. ЗАКОН СОХРАНЕНИЯ МЕХАНИЧЕСКОЙ ЭНЕРГИИ
- I.4.1 МОМЕНТ СИЛЫ И МОМЕНТ ИНЕРЦИИ
- II. Монозы и их характеристика
- II. ЭЛЕКТРИЧЕСКИЙ ДИПОЛЬ. ДИПОЛЬНЫЙ МОМЕНТ СИСТЕМЫ ЭЛЕКТРИЧЕСКИХ ЗАРЯДОВ
- IV. Электромагнитный момент

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
