Однофазные двигатели
Однофазные асинхронные двигатели используют в тех случаях, когда невозможно или нежелательно подключаться к трехфазной сети. Они имеют одну обмотку на статора, подключаемую к однофазной сети переменного тока. Протекающий в этой обмотке переменный ток создает в рабочем зазоре машины неподвижное пульсирующее магнитное поле, т.е. поле, ось которого неподвижна в пространстве, а амплитуда магнитного потока изменяется во времени по закону синуса. Такое поле можно представить в виде двух одинаковых круговых вращающихся в противоположные стороны магнитных полей с амплитудами магнитного потока, равными половине амплитуды пульсирующего поля. Короткозамкнутая обмотка ротора взаимодействует с каждым из этих полей, поэтому двигатель можно рассматривать как два одинаковых двигателя с круговыми магнитными полями, соединенных общим валом. В одном двигателе поле вращается согласно с направлением вращения вала, а в другом – встречно. Для каждого двигателя можно построить механическую характеристику (рис. 1). Для согласного вращения это будет характеристика 1, а для встречного – 2. Так как вал у них общий, то результирующую характеристику можно получить, суммируя абсциссы характеристик 1 и2.
Как следует из рисунка 1, у однофазного двигателя будет существенно меньшая мощность и перегрузочная способность. Кроме того, он принципиально не сможет самостоятельно запуститься, т.к. его пусковой момент равен нулю. У таких двигателей также очень низкий КПД, поэтому их мощность не превосходит обычно нескольких десятков ватт и применяются они в основном в бытовой аппаратуре.
 Для пуска двигателя применяют дополнительную пусковую обмотку (ПО рис. 2). Ось этой обмотки смещена в пространстве на 90° по отношению к оси рабочей обмотки (РО) и она подключается к сети через сопротивление или конденсатор, служащие для сдвига фазы, протекающего в ней тока. Если ток в ПО смещен по фазе по отношению к току РО на 90° , то в двигателе формируется круговое вращающееся магнитное поле и он запускается как обычный асинхронный двигатель, после чего ПО отключается, т.к. она не рассчитана на длительную работу. На самом деле условие формирования кругового поля при пуске полностью не выполняется, но все же составляющая согласного вращения усиливается и возникает достаточный пусковой момент.
Для пуска двигателя применяют дополнительную пусковую обмотку (ПО рис. 2). Ось этой обмотки смещена в пространстве на 90° по отношению к оси рабочей обмотки (РО) и она подключается к сети через сопротивление или конденсатор, служащие для сдвига фазы, протекающего в ней тока. Если ток в ПО смещен по фазе по отношению к току РО на 90° , то в двигателе формируется круговое вращающееся магнитное поле и он запускается как обычный асинхронный двигатель, после чего ПО отключается, т.к. она не рассчитана на длительную работу. На самом деле условие формирования кругового поля при пуске полностью не выполняется, но все же составляющая согласного вращения усиливается и возникает достаточный пусковой момент.
 Другим способом создания вращающего магнитного поля является "расщепление" полюсов обмотки статора (П рис. 3). Это означает разделение полюсов статора на две части, одну из которых охватывают короткозамкнутым витком (В). Переменный магнитный поток, проходящий через короткозамкнутый виток, наводит в нем ЭДС и переменный ток. Этот ток создает свой магнитный поток, смещенный по фазе относительно потока в той части полюса, которая не охвачена короткозамкнутым витком. Два переменных магнитных потока смещенных по фазе и в пространстве на некоторый угол создают вращающееся магнитное поле. Ротор такого двигателя может вращаться только в одном направлении, т.к. при изменении полярности тока в обмотке изменяется и полярность тока в короткозамкнутом витке.
Другим способом создания вращающего магнитного поля является "расщепление" полюсов обмотки статора (П рис. 3). Это означает разделение полюсов статора на две части, одну из которых охватывают короткозамкнутым витком (В). Переменный магнитный поток, проходящий через короткозамкнутый виток, наводит в нем ЭДС и переменный ток. Этот ток создает свой магнитный поток, смещенный по фазе относительно потока в той части полюса, которая не охвачена короткозамкнутым витком. Два переменных магнитных потока смещенных по фазе и в пространстве на некоторый угол создают вращающееся магнитное поле. Ротор такого двигателя может вращаться только в одном направлении, т.к. при изменении полярности тока в обмотке изменяется и полярность тока в короткозамкнутом витке.
Основные понятия и принцип действия
Синхронные машины являются основными источниками электрической энергии в мире. Они применяются также в качестве двигателей преимущественно большой мощности, а также малой мощности в системах автоматики. В последнее время область их применения расширяется. На их основе создаются высокоточные приборные приводы с уникальными характеристиками.
Название машины связано с тем, что в статическом режиме работы ее ротор вращается с такой же скоростью, с какой вращается магнитное поле, т.е. синхронно с полем.
Конструкция ротора
 Синхронная машина является машиной переменного тока. Ее статор в принципе ничем не отличается от статора асинхронной машины. Ротор же представляет собой постоянный магнит или электромагнит, обмотка которого питается постоянным током через контактные кольца и щетки. Эта обмотка называется обмоткой возбуждения.
Синхронная машина является машиной переменного тока. Ее статор в принципе ничем не отличается от статора асинхронной машины. Ротор же представляет собой постоянный магнит или электромагнит, обмотка которого питается постоянным током через контактные кольца и щетки. Эта обмотка называется обмоткой возбуждения.
Число пар полюсов ротора p определяется скоростью вращения машины по известному выражению для скорости вращения магнитного поля -. У тихоходных машин, например генераторов гидроэлектростанций, число пар полюсов может быть несколько десятков. У быстроходных, например, у генераторов тепловых электростанций, число пар полюсов обычно равно 1. Полюсы ротора могут конструктивно выполняться отдельно (рис. 1) или формироваться обмоткой распределенной в пазах цилиндрического ротора (рис.2). В первом случае ротор называется явнополюсным, во втором - неявнополюсным. Неявнополюсные роторы используются в быстроходных машинах потому, что их конструкция обладает большей прочностью и может противостоять значительным центробежным силам.
 Принцип действия
Принцип действия
Принцип действия синхронных машин основан на взаимодействии магнитных полей статора и ротора. Схематически вращающееся магнитное поле статора можно изобразить полюсами магнитов вращающихся в пространстве со скоростью вращения магнитного поля статора  (рис. 1). Поле ротора также можно изобразить в виде постоянного магнита, вращающегося синхронно с полем статора.
(рис. 1). Поле ротора также можно изобразить в виде постоянного магнита, вращающегося синхронно с полем статора.
 При отсутствии внешнего вращающего момента, приложенного к валу машины, оси полей статора и ротора совпадают (рис. 1 а)). Силы притяжения F действуют на ротор вдоль оси полюсов и взаимно компенсируют друг друга. Угол между осями полей статора и ротора равен нулю.
При отсутствии внешнего вращающего момента, приложенного к валу машины, оси полей статора и ротора совпадают (рис. 1 а)). Силы притяжения F действуют на ротор вдоль оси полюсов и взаимно компенсируют друг друга. Угол между осями полей статора и ротора равен нулю.
Если на вал машины действует тормозной момент, то ротор смещается в сторону запаздывания на угол q (рис. 1 б). В результате силы притяжения F раскладываются на составляющие, направленные вдоль оси полюсов ротора  (осевая составляющая) и перпендикулярно оси полюсов
(осевая составляющая) и перпендикулярно оси полюсов  (тангенциальная составляющая). Осевые составляющие взаимно компенсируются, а тангенциальные создают вращающий момент
(тангенциальная составляющая). Осевые составляющие взаимно компенсируются, а тангенциальные создают вращающий момент  , компенсирующий внешний момент, приложенный к валу (D - диаметр точек приложения тангенциальных сил). Машина при этом работает в режиме двигателя, компенсируя расходуемую на валу механическую мощность потреблением активной мощности из сети питающей статор.
, компенсирующий внешний момент, приложенный к валу (D - диаметр точек приложения тангенциальных сил). Машина при этом работает в режиме двигателя, компенсируя расходуемую на валу механическую мощность потреблением активной мощности из сети питающей статор.
В случае если к ротору прикладывается внешний момент, создающий ускорение, т.е. действующий в направлении вращения вала, картина взаимодействия полей меняется на обратную. Направление углового смещения q изменяется на противоположное, соответственно изменяется направление тангенциальных сил и направление действия электромагнитного момента. В этом случае он становится тормозным, а машина работает генератором, преобразующим подводимую в валу машины механическую энергию, в электрическую энергию, отдаваемую в сеть, питающую статор.
 Вращающий момент в синхронной машине может возникать и при отсутствии собственного магнитного поля у ротора. Пусть, например, обмотка возбуждения явнополюсного ротора отключена от питания. Тогда картина магнитного поля машины будет иметь вид, представленный на рисунке 2. Здесь явнополюсный ротор связан с системой координат d-q таким образом, что ось d-d совмещена с осью симметрии в направлении максимальной магнитной проводимости, а ось q-q с направлением минимальной магнитной проводимости. Ось d-d совпадает также с осью магнитного поля возбужденного ротора и называется продольной осью, а ось q-q соответственно – поперечной.
Вращающий момент в синхронной машине может возникать и при отсутствии собственного магнитного поля у ротора. Пусть, например, обмотка возбуждения явнополюсного ротора отключена от питания. Тогда картина магнитного поля машины будет иметь вид, представленный на рисунке 2. Здесь явнополюсный ротор связан с системой координат d-q таким образом, что ось d-d совмещена с осью симметрии в направлении максимальной магнитной проводимости, а ось q-q с направлением минимальной магнитной проводимости. Ось d-d совпадает также с осью магнитного поля возбужденного ротора и называется продольной осью, а ось q-q соответственно – поперечной.
При отсутствии внешнего момента явнополюсный ротор займет положение, при котором продольная ось будет совпадать с осью полюсов магнитного поля статора. Это положение соответствует минимальному магнитному сопротивлению для магнитного потока статора.
Если на вал машины будет действовать тормозной момент, то ротор отклонится на угол q. При этом магнитное поле статора деформируется, т.к. магнитный поток будет стремиться замкнуться по пути наименьшего сопротивления. Магнитный поток определяется через магнитные силовые линии, т.е. линии, направление которых в каждой точке соответствует направлению действия силы, поэтому деформация поля приведет, также как и в случае возбужденного ротора, к появлению результирующей тангенциальной силы  . Отличие от возбужденного ротора будет состоять в том, что тангенциальная сила будет функцией двойного угла q. Это отличие возникает вследствие того, что у возбужденного ротора возможно только одно положение устойчивого равновесия при
. Отличие от возбужденного ротора будет состоять в том, что тангенциальная сила будет функцией двойного угла q. Это отличие возникает вследствие того, что у возбужденного ротора возможно только одно положение устойчивого равновесия при  , а невозбужденный ротор может находиться в равновесии при
, а невозбужденный ротор может находиться в равновесии при  .
.
Вращающий момент, возникающий в машине с невозбужденным ротором за счет тангенциальных сил называется реактивным моментом и его зависимость от q выражается функцией  .
.
Очевидно, что необходимым условием возникновения реактивного момента является магнитная асимметрия ротора.
Рассмотренные выше процессы в синхронной машине наглядно демонстрируют принцип обратимости электрических машин, т.е. способность любой электрической машины изменять направление преобразования энергии на противоположное. В синхронных машинах для перехода от режима работы двигателем в режим генератора достаточно изменить направление (знак) момента нагрузки на валу
Реакция якоря синхронной машины
Под реакцией якоря в синхронных машинах понимают воздействие магнитного поля статора (якоря) на магнитное поле ротора. Реакция якоря оказывает сильное влияние на все электромагнитные процессы в машине. Явление реакции по определению связано с магнитным полем статора, поэтому характер и степень влияния реакции определяется током статора, т.е. нагрузкой машины.
 Рассмотрим этот процесс на примере синхронного генератора. Изобразим вращающееся магнитное поле ротора вектором
Рассмотрим этот процесс на примере синхронного генератора. Изобразим вращающееся магнитное поле ротора вектором  . При вращении оно пересекает неподвижные проводники обмоток статора и наводит в них ЭДС
. При вращении оно пересекает неподвижные проводники обмоток статора и наводит в них ЭДС  , отстающую от потока на
, отстающую от потока на  . Ток статора
. Ток статора  создает магнитный поток статора
создает магнитный поток статора  , совпадающий с ним по направлению. В зависимости от характера нагрузки ток статора может иметь фазовый сдвиг по отношению к ЭДС в пределах
, совпадающий с ним по направлению. В зависимости от характера нагрузки ток статора может иметь фазовый сдвиг по отношению к ЭДС в пределах  .
.
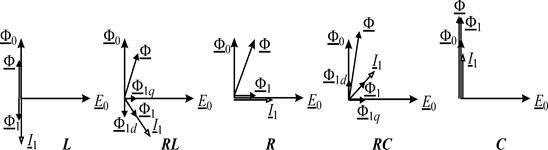
При чисто активной нагрузке (R) ток и магнитный поток статора совпадают по фазе с и результирующий магнитный поток машины  оказывается смещенным относительно потока ротора на некоторый угол в сторону запаздывания. В результате смещения потока магнитное поле ослабляется под набегающими краями полюсов ротора и усиливается под сбегающими. Несмотря на то, что в результате смещения сбегающие края полюсов подмагничиваются, результирующее поле машины ослабляется, т.к. из-за насыщения полюсов в зоне подмагничивания оно проявляется слабее, чем размагничивание на набегающих краях. В целом при активной нагрузке магнитное поле ослабляется и деформируется.
оказывается смещенным относительно потока ротора на некоторый угол в сторону запаздывания. В результате смещения потока магнитное поле ослабляется под набегающими краями полюсов ротора и усиливается под сбегающими. Несмотря на то, что в результате смещения сбегающие края полюсов подмагничиваются, результирующее поле машины ослабляется, т.к. из-за насыщения полюсов в зоне подмагничивания оно проявляется слабее, чем размагничивание на набегающих краях. В целом при активной нагрузке магнитное поле ослабляется и деформируется.
При чисто индуктивной нагрузке (L) ток статора и магнитный поток отстают от ЭДС на . Поток статора оказывается направленным встречно по отношению к потоку ротора и сильно размагничивает машину. Однако, в отличие от активной нагрузки, искажения поля за счет смещения потока не происходит.
При чисто емкостной нагрузке (C) ток статора и магнитный поток опережают ЭДС на и поле в машине усиливается потоком реакции, направленным согласно с потоком ротора. Искажения поля в этом случае также не происходит, а усиление поля вследствие насыщения оказывается выраженным слабо.
В случае активно-реактивной нагрузки (RL и RC) поток статора оказывается смещенным на угол меньший, чем , в сторону запаздывания или опережения. В этом случае магнитный поток статора , можно разложить на продольную  и поперечную
и поперечную  составляющие. Продольная составляющая будет оказывать при RL нагрузке размагничивающее действие, а при RC нагрузке – подмагничивающее. Поперечная составляющая будет вызывать деформацию поля, аналогичную деформации при активной нагрузке.
составляющие. Продольная составляющая будет оказывать при RL нагрузке размагничивающее действие, а при RC нагрузке – подмагничивающее. Поперечная составляющая будет вызывать деформацию поля, аналогичную деформации при активной нагрузке.
Таким образом реакция якоря в синхронной машине изменяет величину и направление магнитного потока, в отличие от асинхронной машины, у которой  . Негативное влияние реакции якоря в синхронных машинах снижают увеличением рабочего зазора.
. Негативное влияние реакции якоря в синхронных машинах снижают увеличением рабочего зазора.
Магнитный поток вызывает искажение магнитного поля ротора, которое проявляется в статоре в виде ЭДС  . Так как поток линейно связан с током статора
. Так как поток линейно связан с током статора  , то эту ЭДС можно представить в комплексной форме через некое индуктивное сопротивление в виде
, то эту ЭДС можно представить в комплексной форме через некое индуктивное сопротивление в виде  .
.
Уравнение статора и векторная диаграмма
Для статора синхронной машины можно составить уравнение Кирхгофа, аналогично тому, как это делается для асинхронных машин. В нем нужно учесть падение напряжения на активном сопротивлении обмотки статора  ; ЭДС, наводимую магнитным потоком ротора, ; ЭДС потока рассеяния
; ЭДС, наводимую магнитным потоком ротора, ; ЭДС потока рассеяния  и ЭДС, наводимую потоком реакции якоря, .
и ЭДС, наводимую потоком реакции якоря, .

 Знак плюс в уравнении статора соответствует режиму работы машины двигателем, а минус – генератором. Индуктивные сопротивления рассеяния
Знак плюс в уравнении статора соответствует режиму работы машины двигателем, а минус – генератором. Индуктивные сопротивления рассеяния  и реакции якоря
и реакции якоря  можно рассматривать как суммарное синхронное сопротивление
можно рассматривать как суммарное синхронное сопротивление  . Можно также упростить уравнение с учетом того, что обычно
. Можно также упростить уравнение с учетом того, что обычно  .
.
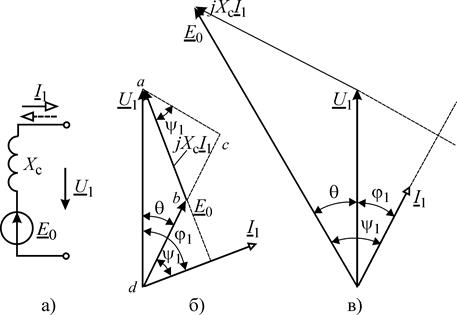
Схема замещения, соответствующая упрощенному уравнению статора показана на рисунке (а). Направление тока в генераторном режиме показано сплошной стрелкой, а в двигательном – штриховой.
На рисунке (б) приведена векторная диаграмма для режима работы двигателем, соответствующая уравнению  . Здесь вектор ЭДС отстает от напряжения
. Здесь вектор ЭДС отстает от напряжения  на угол нагрузки q , а вектор тока статора – на от вектора
на угол нагрузки q , а вектор тока статора – на от вектора  , замыкающего треугольник векторов напряжений.
, замыкающего треугольник векторов напряжений.
При работе синхронной машины в режиме генератора на сеть с тем же напряжением направление тока поменяется на противоположное и уравнение статора примет вид  . Изменится также знак угла нагрузки q . Теперь ЭДС будет опережать и векторная диаграмма примет, показанный на рисунке (в).
. Изменится также знак угла нагрузки q . Теперь ЭДС будет опережать и векторная диаграмма примет, показанный на рисунке (в).
Внешняя характеристика генератора
Синхронные генераторы малой мощности используются как автономные источники питания. Их мощность соизмерима с мощностью подключенной нагрузки, поэтому нагрузка оказывает значительное воздействие на электромагнитные процессы в таком генераторе. В самом общем виде влияние нагрузки на генератор отражается внешней характеристикой.
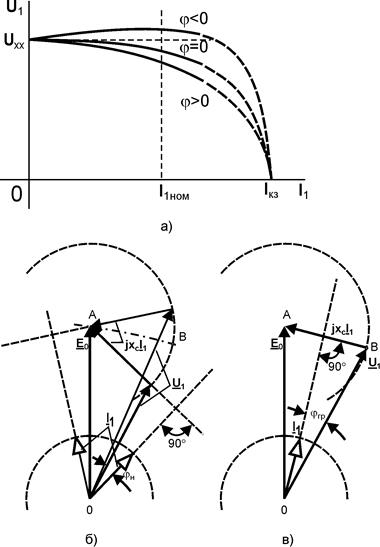 Внешней характеристикой называется зависимость падения напряжения в нагрузке, подключённой к обмотке статора, от величины протекающего в ней тока. На рис. (а) приведены внешние характеристики синхронного генератора для различных видов нагрузки. Все характеристики нелинейны и монотонны. Они исходят из точки холостого хода, где напряжение на выходе генератора
Внешней характеристикой называется зависимость падения напряжения в нагрузке, подключённой к обмотке статора, от величины протекающего в ней тока. На рис. (а) приведены внешние характеристики синхронного генератора для различных видов нагрузки. Все характеристики нелинейны и монотонны. Они исходят из точки холостого хода, где напряжение на выходе генератора  в точности равно ЭДС
в точности равно ЭДС  , наводимой магнитным потоком ротора в обмотках статора.
, наводимой магнитным потоком ротора в обмотках статора.
При активной и активно-индуктивной нагрузке внешняя характеристика синхронного генератора имеет отрицательный наклон на всём интервале от точки холостого хода ( ) до точки короткого замыкания (  ).
).
При активно-емкостной нагрузки внешняя характеристика имеет участок, на котором напряжение на выходе генератора превышает ЭДС холостого хода. Механизм появления такого участка поясняют векторные диаграммы на рис. (б) и (в). Если изменять характер нагрузки в пределах -  , сохраняя при этом постоянным значение тока (например, его номинальное значение
, сохраняя при этом постоянным значение тока (например, его номинальное значение  ), то конец вектора будет описывать на комплексной плоскости дугу полуокружности. Вектор падения напряжения , соответствующий суммарной ЭДС потока рассеяния и реакции якоря, перпендикулярен вектору тока , и в сумме с падением напряжения в нагрузке образует вектор ЭДС холостого хода , т.е. ЭДС потока ротора. Эта ЭДС не зависит от величины и характера нагрузки. Не зависит от них и синхронное сопротивление
), то конец вектора будет описывать на комплексной плоскости дугу полуокружности. Вектор падения напряжения , соответствующий суммарной ЭДС потока рассеяния и реакции якоря, перпендикулярен вектору тока , и в сумме с падением напряжения в нагрузке образует вектор ЭДС холостого хода , т.е. ЭДС потока ротора. Эта ЭДС не зависит от величины и характера нагрузки. Не зависит от них и синхронное сопротивление  , поэтому при вращении вектора тока вектор будет поворачиваться относительно точки конца вектора и его начало будет описывать полуокружность, являющуюся геометрическим местом точек конца вектора падения напряжения в нагрузке . На рис. (б) приведены две системы векторов для активно-индуктивной и активно-емкостной нагрузок.
, поэтому при вращении вектора тока вектор будет поворачиваться относительно точки конца вектора и его начало будет описывать полуокружность, являющуюся геометрическим местом точек конца вектора падения напряжения в нагрузке . На рис. (б) приведены две системы векторов для активно-индуктивной и активно-емкостной нагрузок.
Если с помощью вектора в качестве радиуса построить дугу окружности AB, то она пересечёт полуокружность вектора в точке B, которая и определит граничное значение угла  , начиная с которого (
, начиная с которого (  ) напряжение на выходе генератора
) напряжение на выходе генератора  при данном токе
при данном токе  будет превосходить ЭДС холостого хода ротора. Из равностороннего треугольника 0AB (рис. (в)), образованного векторами , и , на высоте которого располагается вектор тока , легко можно определить предельный фазовый угол нагрузки
будет превосходить ЭДС холостого хода ротора. Из равностороннего треугольника 0AB (рис. (в)), образованного векторами , и , на высоте которого располагается вектор тока , легко можно определить предельный фазовый угол нагрузки  .
.
Электромагнитный момент и угловые характеристики
При рассмотрении принципа работы синхронных машин было установлено, что вращающий момент является синусной функцией угла нагрузки q . Этот же результат можно получить из баланса мощностей машины.
Активная мощность, потребляемая машиной из сети равна  , где
, где  - число фаз обмотки статора. Из векторной диаграммы следует, что
- число фаз обмотки статора. Из векторной диаграммы следует, что  . Кроме того, из прямоугольных треугольников abc и adc получим
. Кроме того, из прямоугольных треугольников abc и adc получим  . Отсюда активная мощность
. Отсюда активная мощность  . Если пренебречь относительно небольшими тепловыми потерями в статоре, то активная мощность будет равна электромагнитной мощности, т.е. мощности передаваемой магнитным полем из статора в ротор
. Если пренебречь относительно небольшими тепловыми потерями в статоре, то активная мощность будет равна электромагнитной мощности, т.е. мощности передаваемой магнитным полем из статора в ротор  , где
, где  - синхронная угловая частота вращения ротора,
- синхронная угловая частота вращения ротора,  - угловая частота питающей сети, а p - число пар полюсов машины. Отсюда вращающий момент синхронной машины равен
- угловая частота питающей сети, а p - число пар полюсов машины. Отсюда вращающий момент синхронной машины равен
 . При постоянном напряжении сети максимальный момент машины зависит только от ЭДС потока ротора, т.е. от величины тока возбуждения.
. При постоянном напряжении сети максимальный момент машины зависит только от ЭДС потока ротора, т.е. от величины тока возбуждения.
В случае явнополюсной машины индуктивное сопротивление реакции якоря по продольной  и поперечной оси
и поперечной оси  будут разными
будут разными  . Соответственно разными будут и синхронные сопротивления по этим осям –
. Соответственно разными будут и синхронные сопротивления по этим осям –  и
и  . Подставляя эти выражения в уравнение момента, получим
. Подставляя эти выражения в уравнение момента, получим

Это выражение справедливо для любого типа ротора как явнополюсного, таки неявнополюсного. У неявнополюсного ротора  . Тогда второе слагаемое обращается в нуль, и мы придем к полученному ранее выражению. Таким образом, в случае магнитной асимметрии ротора электромагнитный момент складывается из двух составляющих: основного
. Тогда второе слагаемое обращается в нуль, и мы придем к полученному ранее выражению. Таким образом, в случае магнитной асимметрии ротора электромагнитный момент складывается из двух составляющих: основного  и реактивного
и реактивного  моментов.
моментов.
 Зависимость электромагнитного момента машины от угла нагрузки называется угловой характеристикой. В общем случае она представляет собой сумму двух синусоид основного и реактивного моментов показанных на рисунке 1. Максимум основного момента приходится на угол
Зависимость электромагнитного момента машины от угла нагрузки называется угловой характеристикой. В общем случае она представляет собой сумму двух синусоид основного и реактивного моментов показанных на рисунке 1. Максимум основного момента приходится на угол  , а реактивного –
, а реактивного –  .
.
Участки характеристики с положительной производной  соответствуют устойчивым режимам работы машины, т.е. углам нагрузки
соответствуют устойчивым режимам работы машины, т.е. углам нагрузки  . На этих участках увеличение момента нагрузки вызывает увеличение угла нагрузки и соответственно электромагнитного момента вплоть до статического состояния, когда момент нагрузки будет уравновешен моментом машины. На участках с
. На этих участках увеличение момента нагрузки вызывает увеличение угла нагрузки и соответственно электромагнитного момента вплоть до статического состояния, когда момент нагрузки будет уравновешен моментом машины. На участках с  увеличение угла нагрузки будет приводить к снижению электромагнитного момента и увеличению рассогласования с моментом на валу. Если при этом момент нагрузки не превышает максимального момента машины, то ротор повернувшись чуть более чем на пол-оборота придет в точку статического равновесия на устойчивом участке угловой характеристики.
увеличение угла нагрузки будет приводить к снижению электромагнитного момента и увеличению рассогласования с моментом на валу. Если при этом момент нагрузки не превышает максимального момента машины, то ротор повернувшись чуть более чем на пол-оборота придет в точку статического равновесия на устойчивом участке угловой характеристики.
 Очевидно, что синхронная работа машины возможна только если нагрузочный момент не превышает максимальный
Очевидно, что синхронная работа машины возможна только если нагрузочный момент не превышает максимальный  .
.
Механическая характеристика синхронной машины показана на рис. 2. Она представляет собой отрезок прямой линии, проходящий через точку синхронной скорости  параллельно оси момента и ограниченный значениями угловой характеристики. Для каждой точки механической характеристик можно определить угол нагрузки, спроектировав эту точку на участок устойчивой работы обращенной угловой характеристики.
параллельно оси момента и ограниченный значениями угловой характеристики. Для каждой точки механической характеристик можно определить угол нагрузки, спроектировав эту точку на участок устойчивой работы обращенной угловой характеристики.
Пуск синхронного двигателя
Синхронные машины в принципе не имеют пускового момента и не могут самостоятельно разгоняться до синхронной скорости, т.к. при включении статора в сеть его магнитное поле и ротор вращаются с разными скоростями. Если частоту вращения поля статора в пространстве обозначить , а частоту вращения ротора –  , то скольжение ротора будет равно –
, то скольжение ротора будет равно –  , где
, где  ;
;  ;
;  - число пар полюсов машины; - частота сети;
- число пар полюсов машины; - частота сети;  – частота скольжения, т.е. частота, с которой изменяются во времени периодические величины в электромагнитных процессах в роторе. Поэтому угол нагрузки q является функцией времени –
– частота скольжения, т.е. частота, с которой изменяются во времени периодические величины в электромагнитных процессах в роторе. Поэтому угол нагрузки q является функцией времени –  , а электромагнитный момент изменяется во времени по синусоидальному закону
, а электромагнитный момент изменяется во времени по синусоидальному закону  . При этом его среднее за период частоты скольжения значение остаётся равным нулю.
. При этом его среднее за период частоты скольжения значение остаётся равным нулю.
Для пуска ротор синхронной машины снабжается специальной пусковой короткозамкнутой обмоткой, аналогичной обмотке ротора асинхронного двигателя типа беличья клетка, которая в асинхронном режиме создаёт электромагнитный момент  . Кроме синхронного
. Кроме синхронного  и асинхронного вращающих моментов на ротор машины действует некоторый тормозной момент или момент нагрузки
и асинхронного вращающих моментов на ротор машины действует некоторый тормозной момент или момент нагрузки  . С учётом всех приложенных моментов движение ротора можно описать с помощью второго закона Ньютона следующим образом -
. С учётом всех приложенных моментов движение ротора можно описать с помощью второго закона Ньютона следующим образом -
 ,
,
где  - суммарный момент инерции ротора и нагрузки, приведённый к оси ротора.
- суммарный момент инерции ротора и нагрузки, приведённый к оси ротора.
Для анализа процесса разгона ротора в первом приближении предположим, что его скорость изменяется достаточно медленно так, что в пределах периода  скольжение ротора остаётся постоянным. Это соответствует приближённому равенству
скольжение ротора остаётся постоянным. Это соответствует приближённому равенству  , т.е. угловое ускорение ротора определяется только синхронным моментом , т.е.
, т.е. угловое ускорение ротора определяется только синхронным моментом , т.е.  . Отсюда составляющая угловой скорости, соответствующая этому ускорению будет
. Отсюда составляющая угловой скорости, соответствующая этому ускорению будет  , т.е. она также будет изменяться во времени по синусоидальному закону с максимальным положительным значением
, т.е. она также будет изменяться во времени по синусоидальному закону с максимальным положительным значением  , растущим по мере уменьшения скольжения
, растущим по мере уменьшения скольжения  и разгона машины.
и разгона машины.
Для реактивной машины, с учётом того, что её момент является функцией двойного угла q это выражение примет вид  .
.
 Таким образом, в процессе разгона мгновенное значение скорости вращения ротора будет определяться медленно изменяющейся составляющей
Таким образом, в процессе разгона мгновенное значение скорости вращения ротора будет определяться медленно изменяющейся составляющей  , обусловленной действием моментов нагрузки и короткозамкнутой обмотки, и пульсирующей составляющей
, обусловленной действием моментов нагрузки и короткозамкнутой обмотки, и пульсирующей составляющей  , обусловленной взаимодействием магнитных полей статора и ротора (рис. 1).
, обусловленной взаимодействием магнитных полей статора и ротора (рис. 1).
В тот момент, когда максимальное положительное значение синхронной составляющей скорости вращения ротора станет равным или большим разности скоростей вращения поля статора и ротора (  ) машина войдёт в синхронизм, т.е.
) машина войдёт в синхронизм, т.е. 
Отсюда максимальное скольжение ротора, при котором войдёт в синхронизм машина с возбуждёнными полюсами -
а реактивная машина -
 Условием самозапуска двигателя является условие
Условием самозапуска двигателя является условие  . Из полученных выражений следует, что это условие всегда выполняется при достаточно низкой частоте сети и безусловно всегда при постоянном токе
. Из полученных выражений следует, что это условие всегда выполняется при достаточно низкой частоте сети и безусловно всегда при постоянном токе  . Условие самозапуска теоретически может быть выполнено также при малом моменте инерции .
. Условие самозапуска теоретически может быть выполнено также при малом моменте инерции .
Выражения для скольжения синхронизации  показывают, что оно определяется соотношением собственной частоты свободных угловых колебаний ротора
показывают, что оно определяется соотношением собственной частоты свободных угловых колебаний ротора  и частоты сети . Чем больше собственная частота колебаний, тем легче происходит запуск синхронного двигателя.
и частоты сети . Чем больше собственная частота колебаний, тем легче происходит запуск синхронного двигателя.
На рис. 2 показан процесс пуска синхронного двигателя с помощью короткозамкнутой обмотки без нагрузки. При включении в сеть в точке a ротор под действием асинхронного момента разгоняется до скорости, соответствующей скольжению входа в синхронизм (точка b), а затем быстро (не более, чем за период приведённой частоты скольжения) втягивается в синхронизм. При этом возникает постепенно затухающий колебательный переходный процесс установки угла нагрузки q (точка c'). Если затем момент нагрузки возрастает и становится равным максимальному  (точка d), то машина выходит из синхронизма и переходит на характеристику асинхронного момента (точка e), в которой будет находиться до тех пор, пока момент нагрузки не уменьшится до значения, соответствующего скольжению синхронизации (точка b).
(точка d), то машина выходит из синхронизма и переходит на характеристику асинхронного момента (точка e), в которой будет находиться до тех пор, пока момент нагрузки не уменьшится до значения, соответствующего скольжению синхронизации (точка b).
При пуске синхронных машин с электромагнитным возбуждением обмотку возбуждения замыкают активным сопротивлением в 8-10 раз большим собственного сопротивления обмотки. Это делается для того, чтобы исключить перенапряжения в обмотке за счет ЭДС наводимой в ней вращающимся полем статора. Когда скорость вращения ротора за счет асинхронного момента короткозамкнутой пусковой обмотки достигнет примерно 95% от синхронной скорости сопротивление отключают и подключают обмотку к источнику постоянного тока. При этом возникает синхронный момент , под действием которого ротор втягивается в синхронизм так, как это было описано выше. Обмотку возбуждения нельзя замыкать накоротко для получения дополнительного асинхронного момента, т.к. при этом на механической характеристике асинхронного момента появится провал примерно на половине синхронной скорости и ротор может остановить разгон на этом участке.
В машинах большой мощности вместо встроенной в ротор короткозамкнутой обмотки используют асинхронный двигатель, соединенный с валом синхронного.
Синхронный компенсатор
 Синхронная машина, подключенная к сети большой мощности, обладает способностью регулировать реактивную составляющую тока за счет изменения тока возбуждения. Из упрощенного уравнения синхронного генератора следует, что ток статора равен
Синхронная машина, подключенная к сети большой мощности, обладает способностью регулировать реактивную составляющую тока за счет изменения тока возбуждения. Из упрощенного уравнения синхронного генератора следует, что ток статора равен  . Для сети большой мощности
. Для сети большой мощности  . При отсутствии механической нагрузки на валу машины угол нагрузки
. При отсутствии механической нагрузки на валу машины угол нагрузки  будет равен нулю и векторы ЭДС потока ротора и напряжения статора будут совпадать по направлению. Если установить в обмотке возбуждения такой ток, при котором
будет равен нулю и векторы ЭДС потока ротора и напряжения статора будут совпадать по направлению. Если установить в обмотке возбуждения такой ток, при котором  , то ток статора
, то ток статора  будет равен нулю (рис. 1(а)). Увеличение тока возбуждения вызовет увеличение ЭДС и разность между ней и напряжением сети компенсируется падением напряжения , при этом машина будет отдавать в сеть чисто индуктивный ток (рис. 1 (б)). Снижение тока возбуждения изменит картину на противоположную и ток отдаваемый в сеть будет емкостным. Таким образом, при отсутствии механической нагрузки изменение тока возбуждения будет приводить к возникновению чисто реактивного тока статора. В случае
будет равен нулю (рис. 1(а)). Увеличение тока возбуждения вызовет увеличение ЭДС и разность между ней и напряжением сети компенсируется падением напряжения , при этом машина будет отдавать в сеть чисто индуктивный ток (рис. 1 (б)). Снижение тока возбуждения изменит картину на противоположную и ток отдаваемый в сеть будет емкостным. Таким образом, при отсутствии механической нагрузки изменение тока возбуждения будет приводить к возникновению чисто реактивного тока статора. В случае  машина называется перевозбужденной, а при
машина называется перевозбужденной, а при  - недовозбужденной. Перевозбужденная машина по отношению к сети эквивалентна емкости, а недовозбужденная – индуктивности.
- недовозбужденной. Перевозбужденная машина по отношению к сети эквивалентна емкости, а недовозбужденная – индуктивности.
 Синхронная машина, не имеющая механической нагрузки и загруженная в основном реактивным током, называется синхронным компенсатором.
Синхронная машина, не имеющая механической нагрузки и загруженная в основном реактивным током, называется синхронным компенсатором.
Если построить зависимость тока статора от тока возбуждения синхронной машины при постоянном напряжении сети  и постоянной мощности на валу
и постоянной мощности на валу  , то они будут иметь вид, показанный на рис.2. По сходству с начертанием соответствующей буквы они называются U-образными. Минимум тока статора на этих характеристиках соответствует чисто активному или нулевому току. При уменьшении или увеличении тока возбуждения в токе статора появляется реактивная составляющая, увеличивающая суммарный ток. Слева характеристики ограничены линией AB, соответствующей максимальному углу нагрузки
, то они будут иметь вид, показанный на рис.2. По сходству с начертанием соответствующей буквы они называются U-образными. Минимум тока статора на этих характеристиках соответствует чисто активному или нулевому току. При уменьшении или увеличении тока возбуждения в токе статора появляется реактивная составляющая, увеличивающая суммарный ток. Слева характеристики ограничены линией AB, соответствующей максимальному углу нагрузки  . Увеличение нагрузки на валу (
. Увеличение нагрузки на валу (  ) вызывает увеличение активной составляющей тока статора и соответствующий подъем характеристики. Левая ветвь характеристики соответствует режиму недовозбуждения, а правая – перевозбуждения. На практике компенсаторы чаще всего работают в режиме перевозбуждения, т.к. промышленная сеть в основном нагружена асинхронными двигателями обладающими относительно низким коэффициентом мощности и создающими дефицит реактивной мощности.
) вызывает увеличение активной составляющей тока статора и соответствующий подъем характеристики. Левая ветвь характеристики соответствует режиму недовозбуждения, а правая – перевозбуждения. На практике компенсаторы чаще всего работают в режиме перевозбуждения, т.к. промышленная сеть в основном нагружена асинхронными двигателями обладающими относительно низким коэффициентом мощности и создающими дефицит реактивной мощности.
Несмотря на то, что любая синхронная машина может работать в качестве компенсатора, они изготавливаются как специализированный тип машины. Это связано с тем, что они загружены в основном реактивным током, поэтому можно облегчить конструкцию, уменьшив массу, габариты и стоимость.
Реактивные синхронные двигатели. Принцип действия и основные характеристики
 Реактивные синхронные двигатели отличаются от обычных отсутствием собственного магнитного поля ротора. Вращающий момент в этих машинах создается за счет магнитной асимметрии ротора. Ротор реактивного двигателя, представляет собой стальной цилиндр, набранный из пластин, вид которых показан на рисунке. В пластинах ротора сделаны отверстия, в которые после сборки заливается алюминий и образуется короткозамкнутая пусковая обмотка, аналогичная обмотке ротора асинхронного двигателя. Магнитная асимметрия ротора может создаваться выемками различной формы на внешней поверхности цилиндра или асимметрией внутренних каналов. В первом случае получается явнополюсный ротор(1, 2 на рис.), во втором - неявнополюсный (3, 4 на рис.). Оба способа позволяют изготавливать роторы с различным числом пар полюсов. На рисунке роторы 1 и 3 имеют одну пару полюсов, роторы 2 и 4 - две.
Реактивные синхронные двигатели отличаются от обычных отсутствием собственного магнитного поля ротора. Вращающий момент в этих машинах создается за счет магнитной асимметрии ротора. Ротор реактивного двигателя, представляет собой стальной цилиндр, набранный из пластин, вид которых показан на рисунке. В пластинах ротора сделаны отверстия, в которые после сборки заливается алюминий и образуется короткозамкнутая пусковая обмотка, аналогичная обмотке ротора асинхронного двигателя. Магнитная асимметрия ротора может создаваться выемками различной формы на внешней поверхности цилиндра или асимметрией внутренних каналов. В первом случае получается явнополюсный ротор(1, 2 на рис.), во втором - неявнополюсный (3, 4 на рис.). Оба способа позволяют изготавливать роторы с различным числом пар полюсов. На рисунке роторы 1 и 3 имеют одну пару полюсов, роторы 2 и 4 - две.
Основным достоинством реактивного двигателя по сравнению с асинхронным является: неизменность скорости вращения, а по сравнению с обычными синхронными двигателями -простота, надежность и малая стоимость ротора, а также отсутствие источника питания необходимого для возбуждения магнитного поля.
Выражение для вращающего момента реактивных двигателей получается как частный случай из общего уравнения момента, если в нем исключить основную составляющую тогда
 .
.
Максимум момента соответствует углу нагрузки  . Величина максимального момента зависит от соотношения индуктивных сопротивлений по продольной и поперечной оси
. Величина максимального момента зависит от соотношения индуктивных сопротивлений по продольной и поперечной оси 
Дата добавления: 2016-06-29; просмотров: 2187;
Поиск по сайту
Узнать еще

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
