Дифференциальный принцип механики на виртуальных перемещениях: принцип Даламбера – Лагранжа.
Дифференциальный принцип механики на Возможных (виртуальных) перемещениях применяют для нахождения движения системы. Принцип дает возможность написать дифференциальные уравнения движения системы в случаях, когда элементарная работа всех сил контактного взаимодействия системы равна нулю:
В таком случае говорят, то есть при идеальных связях.
В этом случае из дифференциального принципа следует, что
сумма элементарных работ всех активных сил и всех сил инерций системы равна нулю на любых виртуальных перемещениях системы:
Эту форму дифференциального принципа называют принцип Даламбера - Лагранжа.
Используя уравнения связей, вектор положения точек тела  и его вариацию
и его вариацию  можно выразить через обобщенные координаты
можно выразить через обобщенные координаты  и их виртуальные перемещения
и их виртуальные перемещения  .
.
Поэтому принцип Даламбера - Лагранжа можно представить в следующем виде:
где  .
.
В силу независимости и произвольности виртуальных перемещений  , уравнение дифференциального принципа распадаются на n уравнений
, уравнение дифференциального принципа распадаются на n уравнений

Эти уравнения есть дифференциальные уравнения движения системы тел с идеальными связями в обобщенных координатах.
Они не включают неизвестные силы контактных взаимодействий.
Для системы  поступательно движущихся тел (материальных точек) принцип запишется в виде:
поступательно движущихся тел (материальных точек) принцип запишется в виде:
Консервативнаясистема. Положения равновесия консервативных систем.
Консервативная система имеет геометрические стационарные связи, сумма элементарных работ сил реакций идеальных связей равна нулю, а все работающие силы потенциальны.
Положения равновесия определяются свойствами сил взаимодействий и виртуальными перемещениями в этих положениях.
А именно: в каждом положении равновесия равны нулю виртуальные работы силового поля и сил реакций связей на любых виртуальных перемещениях:
 .
.
Это свойство сил взаимодействий примем за определение положений равновесия.
Так как для потенциальных сил в положениях равновесия виртуальную работу активных сил можно выразить через дифференциал потенциальной энергии, то есть
то равенство нулю полного дифференциала  потенциальной энергии
потенциальной энергии 
 , означает, что положения равновесия доставляют экстремум потенциальной энергии.
, означает, что положения равновесия доставляют экстремум потенциальной энергии.
Следующее определение положений равновесия консервативной системы тождественно предыдущему.
Положениями равновесияконсервативной системы с идеальными связями называются такие положения системы  , совместимые со связями, в которых потенциальная энергия системы U принимает экстремальные значения:
, совместимые со связями, в которых потенциальная энергия системы U принимает экстремальные значения:
Это определение не связано с движениями системы, и, таким образом, не зависит от начальных состояний системы (начальных положений и начальных скоростей тел).
 Так как связи системы идеальны, то из принципа Даламбера – Лагранжа следует, что на движениях системы в положениях равновесия равна нулю и виртуальная работа сил инерций.
Так как связи системы идеальны, то из принципа Даламбера – Лагранжа следует, что на движениях системы в положениях равновесия равна нулю и виртуальная работа сил инерций.
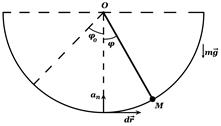
Пример 1. Математический маятник: материальная точка М движется по части окружности  в вертикальной плоскости. В нижней точке,
в вертикальной плоскости. В нижней точке,  , равны нулю виртуальные работы силы тяжести и силы реакции нити. Это есть положение равновесия. маятника. Так как скорость точки в положении равновесия имеет максимум, то касательное ускорение в нем равно нулю. Поэтому сила инерции точки, определяемая нормальным ускорением, перпендикулярна виртуальному перемещению и не работает на нем.
, равны нулю виртуальные работы силы тяжести и силы реакции нити. Это есть положение равновесия. маятника. Так как скорость точки в положении равновесия имеет максимум, то касательное ускорение в нем равно нулю. Поэтому сила инерции точки, определяемая нормальным ускорением, перпендикулярна виртуальному перемещению и не работает на нем.
Заметим, что на границе интервала виртуальная работа силы тяжести (и силы инерции) не равны нулю, поэтому граница интервала не есть положение равновесия, хотя потенциальная энергия маятника в ней имеет максимум.
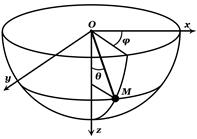 Пример 2. Сферический маятник: материальная точка подвешена на нити в точке О, центре сферы. Хотя сила тяжести и сила реакции нити не работают на элементарных перемещениях, векторы которых являются касательными векторами к параллелям сферы, однако они работают на виртуальных перемещениях, касательных к меридианам сферы. В нижней точке сферы эти силы не работают на всех виртуальных перемещениях, поэтому нижняя точка сферы есть положение равновесия маятника.
Пример 2. Сферический маятник: материальная точка подвешена на нити в точке О, центре сферы. Хотя сила тяжести и сила реакции нити не работают на элементарных перемещениях, векторы которых являются касательными векторами к параллелям сферы, однако они работают на виртуальных перемещениях, касательных к меридианам сферы. В нижней точке сферы эти силы не работают на всех виртуальных перемещениях, поэтому нижняя точка сферы есть положение равновесия маятника.
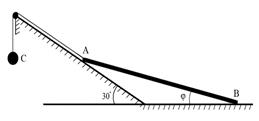 Пример 3. Система состоит из однородного тонкого стержня АВ с массой М и груза D с массой
Пример 3. Система состоит из однородного тонкого стержня АВ с массой М и груза D с массой  , соединенного со стержнем невесомой нитью. При гладкости плоскостей консервативная система с одной степенью свободы имеет идеальные связи. При произвольных массах тел в системе нет положений равновесия. Но если
, соединенного со стержнем невесомой нитью. При гладкости плоскостей консервативная система с одной степенью свободы имеет идеальные связи. При произвольных массах тел в системе нет положений равновесия. Но если  , то все положения системы, допустимые связями
, то все положения системы, допустимые связями  , есть безразличные положения равновесия. Это видно из принципа виртуальных перемещений, который можно записать в следующем виде:
, есть безразличные положения равновесия. Это видно из принципа виртуальных перемещений, который можно записать в следующем виде:

Дата добавления: 2020-05-20; просмотров: 961;
Поиск по сайту
Узнать еще
- I. Понятие о принципах обучения, их взаимосвязь.
- III. Общий принцип сочетания методов в процессе обучения.
- III. Части речи и принципы их классификации
- IV. Критерии и принципы обеспечения безопасности
- IV. Основные принципы этикета государственного служащего
- VIII. Принципы развивающего обучения.
- А.7 Устройство и принципы действия адсорбционных аппаратов
- Абсолютный идеализм Г.В.Ф. Гегеля. Диалектика и принцип системности в философии Гегеля.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
