Регулируемый электропривод как средство рационального использования энергоресурсов и снижения потребления реактивной энергии
Использование регулируемых электроприводов позволяет более эффективно использовать имеющиеся энергоресурсы. Наиболее внедряемым типом регулируемого электропривода в последнее время является частотно-регулируемый асинхронный (и синхронный) электропривод – система преобразователь частоты - асинхронный двигатель (ПЧ-АД). Для решения отдельных производственных задач и энергосбережения находит применение система тиристорный преобразователь напряжения – асинхронный двигатель (ТПН-АД).
Система тиристорный преобразователь напряжения – асинхронный двигатель
Система ТПН-АД состоит из тиристорного преобразователя напряжения (ТПН) и асинхронного двигателя(рис. 3.3). Она обеспечивает за счет регулирования по требуемому временному закону угла открытия тиристоров необходимый закон изменения во времени первой гармоники напряжения, приложенного к двигателю: от минимального (нулевого) до максимального (номинального) значения.
Использование ТПН позволяет снизить энергопотребление недогруженного асинхронного двигателя при работе в зоне номинальной скорости, обеспечив его работу за счет ТПН на регулировочной (U1 < UН), а не на естественной (U1 = UН) характеристике, где U1 – действующее значение первой гармоники напряжения, приложенного к двигателю; UН – действующее значение номинального напряжения сети.
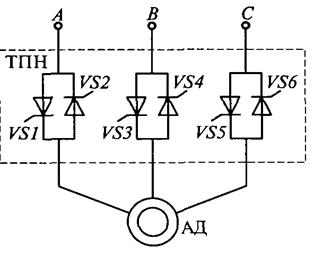
Рис. 3.3. Схема силовой структуры системы ТПН-АД
Этот режим работы иллюстрирует рис. 3.4. Цифрой «1» обозначена естественная характеристика, цифрой «2» – регулировочная механическая характеристика при управлении от ТПН. Мн и Мс – номинальный момент двигателя и момент статической нагрузки; S1 и S2 – скольжение на естественной и регулировочной характеристиках при заданном Мс.
Время формирования питающего напряжения можно варьировать в широких пределах, к примеру – до нескольких минут. Системы плавного пуска с ТПН позволяют ограничить до желаемого уровня моменты асинхронного двигателя в пусковых режимах, обеспечить управляемый («растянутый» во времени) пуск с заданным линейным и нелинейным темпом нарастания скорости, переходные процессы с постоянством тока статора (так называемую «отсечку по току статора»), значение которого может регулироваться.

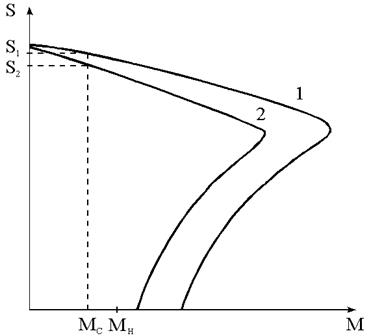
Рис. 3.4. Естественная (1) и регулировочная (2) характеристики
асинхронного двигателя
Недостатком данного метода регулирования напряжения является тот факт, что работа АД на регулировочных характеристиках (при возрастании угла открытия тиристоров α) происходит в режиме прерывистого тока. В периодическом несинусоидальном токе кроме основной гармоники присутствуют нечетные гармоники (5-я, 7-я, 11-я и т. д.). Высшие гармоники увеличивают потери в АД, снижается кпд. С ростом угла α увеличивается фазовый сдвиг первой гармоники тока по отношению к напряжению сети, т.е. уменьшается cosφ. Поэтому такие устройства рекомендуется применять для плавного пуска вентиляторов, насосов, компрессоров и других устройств.
При прямом пуске асинхронных двигателей, когда двигатель сразу подключается к номинальному напряжению сети, на начальном этапе запуска возникают значительные моменты. Они в несколько раз превышают уровни пусковых моментов, рассчитанных по статическим характеристикам, из-за возникновения повышенных нагрузок в кинематических передачах (особенно, когда момент двигателя в переходном режиме носит знакопеременный характер, а в механической части имеются люфты и зазоры). Это приводит к преждевременному износу и выходу из строя элементов кинематической передачи. Диаграмма скорости на участке разгона имеет колебательный характер, процесс сопровождается недопустимыми для ряда механизмов рывками и ускорениями. Происходит значительное увеличение пусковых токов (по сравнению с расчетными значениями по статическим характеристикам), что может привести к недопустимым посадкам напряжения на питающих шинах, особенно при прямом пуске двигателей большой мощности и т. д.
Системы плавного пуска позволяют обеспечить управляемый («растянутый» во времени) пуск с заданным линейным или нелинейным темпом нарастания скорости асинхронного двигателя, с регулированием момента и тока статора до желаемых значений.
Следует отметить:
– систему ТПН-АД, так же как систему реостатного регулирования скорости АД, нельзя признать на современном этапе целесообразной для регулирования скорости при продолжительном режиме работы из-за низких энергетических показателей и существенного снижения КПД электропривода. Экономия электроэнергии при применении систем ТПН незначительна при регулировании скорости АД в установившихся режимах работы. Использование ТПН-АД в большинстве случаев определяется технологическими требованиями производственных механизмов (транспортеров, насосов, вентиляторов, конвейеров, лифтов и др.), требующих плавного пуска и ограничения ударных моментов, ускорений и рывков, возникающих при прямом подключении АД к сети. При использовании систем ТПН-АД для управления недогруженным асинхронным двигателем в зоне номинальной скорости экономия электроэнергии будет тем больше, чем меньше момент двигателя по сравнению с номинальным и чем больше время работы двигателя с недогрузкой. Эффект усиливается при использовании асинхронных двигателей с относительно высоким значением тока холостого хода статора;
– при применении систем ТПН-АД, кроме решения технологических задач, оказывается возможным на 3–5 % снизить потери в асинхронных двигателях за счет ограничения уровня максимальных пусковых токов, обусловленных электромагнитными переходными процессами в машине. Использование плавного пуска асинхронного двигателя позволит снизить посадку напряжения в сети электроснабжения, повысить качество электроэнергии;
– при неизменной частоте питания с понижением U при снижении скорости возрастает скольжение АД и, следовательно, потери в электроприводе;
– работа АД на регулировочных характеристиках при U1 < UН происходит в режиме прерывистого тока, что ведёт к появлению высших гармоник в токе и, следовательно, к росту потерь в электроприводе;
– чередование схем подключения статорной обмотки АД приводит к пульсациям момента двигателя;
– ТПН является потребителем реактивной мощности. При напряжениях меньше номинального и неизменной скорости реактивная мощность может превосходить реактивную мощность при номинальном режиме;
– при условии выбора только оптимальной продолжительности нарастания напряжения при использовании ТПН для плавного пуска АД пусковые потери снижаются до 10–15 %. Эффект ощутим для двигателей средней и большой мощности;
– экономический эффект от внедрения устройства плавного пуска, на наш взгляд, будет складываться из экономии не только (и не столько) электроэнергии, но и снижения эксплуатационных расходов, снижения аварийности трубопроводов и их элементов за счёт исключения гидравлических ударов, снижения потерь, например нефти, и, как следствие, повышения экологической безопасности. Оценить потенциал экономии при такой постановке вопроса без дополнительной проработки для конкретных установок сложно.
В электрической части выпускной квалификационной работы рекомендуется рассмотреть вопрос об установке устройства плавного (мягкого) пуска для безударного запуска нерегулируемых электроприводов на насосных станциях, вентиляторах и т. д. На объектах рекомендуется устанавливать по одному устройству плавного пуска для поочередного запуска АД.
Внедрение частотно - регулируемых асинхронных электроприводов как средства сбережения электроэнергии, повышения cosφ
В электрохозяйстве промышленных предприятий находится в эксплуатации большое количество насосов, вентиляторов, компрессоров, так называемых турбомеханизмов, имеющих «вентиляторный» (зависящий от скорости в квадрате или в более высокой степени) момент статической нагрузки.
В подавляющем большинстве случаев электроприводы указанных механизмов являются нерегулируемыми, что не позволяет обеспечить режим рационального энергопотребления при изменении технологических потребностей в широких пределах.
Эти механизмы, выбранные при проектировании исходя из максимальной производительности, значительную часть времени работают с меньшей производительностью, что определяется изменением потребности в разные периоды времени.
Нерегулируемый электропривод не обеспечивает заметного снижения потребляемой мощности при уменьшении расхода, а также обусловливает существенный рост давления (напора) в системе, что неблагоприятно сказывается на работе технологического оборудования.
Рисунок 3.5 иллюстрирует возможности снижения мощности, потребляемой двигателем насоса, при регулировании скорости электропривода по сравнению с регулированием дроссельной заслонкой. Мощность, потребляемая насосом P, прямо пропорциональна подаче – производительности насоса Q и его напору H.
Характеристики магистрали с ненулевым статическим напором (с противодавлением) Нс, выраженным в относительных единицах: hс = Нс/Нн, изображены кривыми 3 и 4. При номинальном расходе и напоре насос работает в точке А, которой соответствует характеристика магистрали (кривая 3) и характеристика H (Q) насоса (кривая 1) при номинальной скорости двигателя. С уменьшением расхода при нерегулируемом электроприводе (на рис. 3.5, для примера, показан расход, составляющий 0,6Qн , где Qн – номинальный расход или подача) за счет дроссельного регулирования происходит изменение сопротивления магистрали (кривая 4), насос работает в точке В кривой 1, что приводит к возрастанию напора, который становится больше номинального. Мощность, потребляемая насосом, пропорциональна площади прямоугольника ODBF.
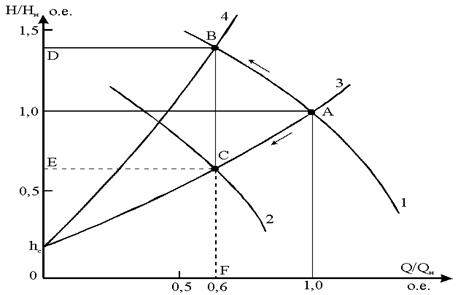
Рис. 3.5. Обоснование эффективности энергосбережения при частотном регулировании асинхронного двигателя по сравнению с регулированием заслонкой
При использовании регулируемого электропривода за счет снижения скорости при снижении расхода насос работает в точке С, что соответствует другой характеристике H(Q) (кривая 2) при неизменной характеристике магистрали (кривая 3). Мощность, потребляемая электроприводом в этом случае, пропорциональна OECF, что наглядно иллюстрирует возможности существенного снижения энергопотребления при внедрении регулируемых электроприводов насосов. Наилучшие технико-экономические показатели при регулировании скорости насосов обеспечивает система преобразователь частоты – асинхронный двигатель (ПЧ-АД), т. е. частотно-регулируемый асинхронный электропривод. Качественная зависимость экономии мощности в функции от подачи (расхода) насоса Q при использовании систем ПЧ-АД вместо дроссельного регулирования показана заштрихованной областью на рис. 3.6.
На рис. 3.6 приведены следующие обозначения: Р/Рн – относительная потребляемая мощность, Рн – номинальная мощность двигателя, Q/Qн – относительный расход, Qн – номинальный расход, кривая 1 – потребляемая мощность при дроссельном регулировании, кривая 2 – потребляемая мощность при применении частотно-регулируемого асинхронного двигателя.
Относительный выигрыш ∆Pi* = ∆Pi /Pн в потребляемой мощности (∆Pi) при относительном расходе Qi* = Qi /Qн.
Рис. 3.6. Зависимость потребляемой мощности в функции расхода при дроссельном регулировании (1) и частотном регулировании асинхронного двигателя (2)
Частота вращения ротора двигателя n = f (1– s)/p. Поэтому, регулируя частоту f, изменяем n. Но для сохранения постоянного магнитного потока АД Ф при изменении f необходимо регулировать напряжение по величине, т. к.
Ф = Е/(к f ) ≈ U/ f ≈ const,
где Е – электродвижущая сила фазы обмотки статора АД.
Это является требованием к преобразователям частоты для электропривода.
Существующие вентильные преобразователи частоты подразделяются на преобразователи с непосредственной связью питающей сети и нагрузки (НПЧ) и на преобразователи частоты с промежуточным звеном постоянного тока.
НПЧ представляют собой три согласованно работающих реверсивных тиристорных преобразователя постоянного тока. НПЧ включается в статорную цепь двигателя и служит для преобразования напряжения стандартной частоты в регулируемое в определенных пределах напряжение по величине и частоте (0–20 Гц). Используются для тихоходных безредукторных электроприводов средней и большой мощностей.
Электропривод с преобразователем частоты с промежуточным звеном постоянного тока представлен на рис. 3.7. На схеме:
SА – главный выключатель;
FU – линейные предохранители;
КМ – главный контактор;
ZF1 – входной фильтр;
LR1 – входной реактор;
UD – выпрямитель;
СВ – фильтр звена постоянного тока;
UW – устройство торможения;
UZ – автономный инвертор напряжения;
LR2 – выходной реактор;
ZF2 – выходной фильтр;
M – асинхронный двигатель.
ПЧ с неуправляемым выпрямителем (см. рис. 3.7) не обеспечивает двухсторонний обмен энергией между сетью и двигателем. При генераторном торможении отдаваемая АД энергия рассеивается в элементах инвертора и резисторе устройства торможения UW. Реактивная мощность Q на входе ПЧ пропорциональна квадрату выходного тока выпрямителя и величине реактивного сопротивления коммутирующего реактора.
Коэффициент мощности по основным гармоническим составляющим сетевого тока и напряжения Км = РS -1. На практике Км ≈ 0,9–0,98.
При активном (управляемом) выпрямителе обеспечивается не только рекуперативное торможение АД (при угле открытия тиристоров α больше 90 градусов), но и работа ПЧ с заданным коэффициентом мощности, например равном единице. Но такие преобразователи частоты дороже.
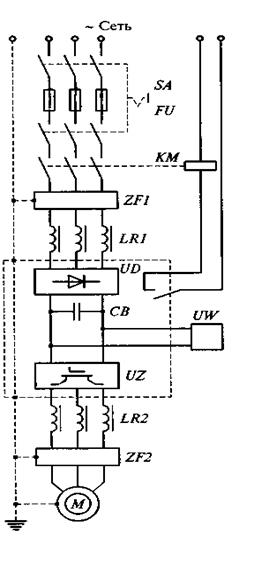
Рис. 3.7. Схема силовых цепей частотно-регулируемого асинхронного электропривода
Преобразователи частоты с автономным инвертором, используемые в электроприводах, позволяют получить выходную частоту от долей герца до нескольких сотен герц.
Асинхронный электропривод с ПЧ наряду с существенной экономией электроэнергии в статических режимах работы позволяет осуществлять плавный пуск и торможение. Прямой пуск АД сопровождается ударными моментами и токами в обмотках статора и ротора, значительно превышающими номинальные значения. Поэтому потери энергии в двигателе и потребление реактивной мощности при прямом пуске существенно возрастают.
Срок окупаемости для ПЧ на напряжение 0,4 кВ – примерно 1,5–2 года при стоимости ПЧ $ 100–120 США на 1кВт регулируемой мощности. Стоимость качественных ПЧ для регулируемого электропривода на напряжение 6 кВ выше: $ 200–250 США на 1кВт регулируемой мощности.
Стоимость устройства плавного пуска – $ 55–80 США на 1 кВт мощности двигателя. Отметим, что в данную оценку ресурса энергосбережения не входит экономический эффект, связанный с повышением cosφ, уменьшением потерь в линиях электроснабжения, существенным повышением надёжности механического и электрического оборудования, увеличением срока его службы, сокращением аварийности трубопроводов и их элементов, уменьшением потерь нефти и повышением экологической безопасности производства.
Выводы
1. Обследование промышленных предприятий показывает, что существующее электрооборудование насосных и компрессорных станций морально и физически устарело. Оно не обеспечивает экономию энергоресурсов. Применяемое регулирование напора дросселированием относится к энергетически неэффективным способам. Прямой пуск двигателей насосов связан со значительными пусковыми токами и приводит к гидравлическим ударам, повышению аварийности трубопроводов и их элементов, увеличению потерь воды, нефти и, как следствие, к снижению экологической безопасности.
2. При проектировании или при принятии решения о модернизации электрооборудования насосных станций необходимо, по нашему мнению, включить следующие основные технические решения:
– внедрение систем преобразователь частоты - асинхронный двигатель (ПЧ-АД) для плавного пуска и регулирования частоты вращения насосов;
– установку устройства плавного (мягкого) пуска для безударного запуска нерегулируемых электроприводов;
– установку программируемого контроллера для регулирования давления и подачи жидкости (нефти, воды), управления электрооборудованием насосных и компрессорных станций, автоматизации их работы и диагностики электрооборудования.
3. Переход на частотное управление электроприводами обеспечивает следующие преимущества:
– плавное бесступенчатое регулирование частоты вращения насосов во всём диапазоне, что позволяет поддерживать напор перекачиваемой жидкости на необходимом уровне;
– контролируемые плавный разгон и торможение двигателей существенно повышают надёжность механического и электрического оборудования, увеличивают срок его службы;
– повышение коэффициента мощности, т. к. преобразователь частоты практически не потребляет реактивной энергии;
– экономию электроэнергии в связи с переходом на энергетически эффективный способ управления и отказом от регулирования напора дросселированием;
– широкие возможности программной настройки параметров электроприводов, контроля работы, диагностики неисправностей.
4. После рассмотрения отечественных и зарубежных данных можно сделать вывод, что экономия энергоресурсов при частотном управлении в насосных, вентиляционных и компрессорных агрегатах составляет 30–50 %. Несмотря на высокую стоимость хороших преобразователей частоты, срок окупаемости, по научно-техническим публикациям, составляет 1–2 года. Рекомендуем их устанавливать в первую очередь на части насосного оборудования, работающего с пониженными коэффициентами мощности.
5. Необходимо обновление станочного парка на предприятиях, т.к. станочный парк в значительной мере состоит из старого (30 и более лет), физически изношенного, морально устаревшего, громоздкого оборудования. Износ станочного парка составляет 80 %. Установленная мощность станков завышена. В целях энергосбережения необходимо иметь более широкий спектр номенклатуры и мощности станочного парка.
6. При выходе из строя электродвигателей следует производить их отбраковку и заменять новыми. По предварительным оценкам, электропотребление двигателей после ремонта возрастает на 10-40 % и более. Стоимость ремонта составляет 60-70 % и более стоимости нового двигателя. При определенных условиях выгоднее покупать новые электродвигатели, чем ремонтировать старые. Стоимость перерасхода потребляемой электроэнергии отремонтированным двигателем за три года равна стоимости нового двигателя, а с учетом стоимости ремонта новый двигатель окупается за год – полтора.
7.Реализация нижеследующих организационно-технических мероприятий обеспечивает в целом снижение энергозатрат на предприятиях до 1,5-2 %:
– проведение инвентаризации установленного электротехнического оборудования и разработка энергетического паспорта;
– разработка обоснованной системы нормирования расхода, учета и контроля производства, получения и потребления ТЭР, охватывающей все основные виды продукции и технологические процессы;
– составление годовых планов мероприятий капитального и текущего ремонтов энергетического оборудования, надлежащее проведение планово – предупредительных ремонтов;
– проведение обучения и пропаганды эффективных способов и методов экономии ТЭР среди работников предприятия;
– изучение возможности использования дешевых местных и нетрадиционных возобновляемых источников ТЭР;
– разработка системы стимулирования персонала, направленной на повышение эффективности функционирования энергопотребляющего оборудования и охватывающей все производственные подразделения и виды энергоресурсов.
Дата добавления: 2018-11-26; просмотров: 1450;
Поиск по сайту
Узнать еще
- API как средство интеграции приложений.
- Cварочные источники энергии.
- I. Кейнсианские функции потребления и сбережений.
- I. Общая характеристика категории состояния как часть речи
- III. Взаимосвязь потребления, сбережений и инвестиций. Парадокс бережливости.
- IP как протокол без установления соединения
- MatLab как научный калькулятор
- V. Проблемное обучение как основной путь активизации учащихся.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
