Теорема Вариньона для плоской системы сил
Если система сил, расположенных как угодно в плоскости приводится к одной равнодействующей  , то момент равнодействующей относительно произвольной точки плоскости равен алгебраической сумме моментов составляющих сил относительно той же точки.
, то момент равнодействующей относительно произвольной точки плоскости равен алгебраической сумме моментов составляющих сил относительно той же точки.
Для доказательства этой теоремы рассмотрим систему двух сил  и
и  , равнодействующая которых определяется диагональю параллелограмма, построенного на этих силах (рис.4.4,а). Возьмем произвольную точку 0 плоскости и приложим к ней взаимно уравновешивающиеся силы
, равнодействующая которых определяется диагональю параллелограмма, построенного на этих силах (рис.4.4,а). Возьмем произвольную точку 0 плоскости и приложим к ней взаимно уравновешивающиеся силы  и
и  , равные по модулю и параллельные равнодействующей .
, равные по модулю и параллельные равнодействующей .
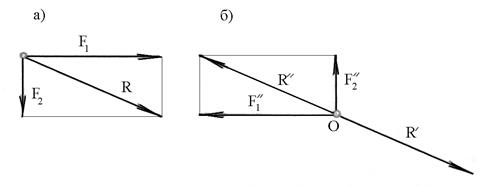
Рис.4.4
Сила является равнодействующей заданных сил, перенесенной в точку О, а силы и образуют присоединенную пару ( , ), момент которой равен сумме моментов составляющих пар: ( ,  ) и ( ,
) и ( ,  ), где и являются составляющими силы . Онисоответственно параллельны заданным силам и . Следовательно:
), где и являются составляющими силы . Онисоответственно параллельны заданным силам и . Следовательно:
m( , ) = m ( , ) + m ( , )
Учитывая, что m( , ) = m0( ); m ( , ) = m0( ) и m ( , ) = m0( ), получаем:
m0( ) = m0( ) + m0( ) (4.8)
Обобщая приведенное доказательство на случай произвольного числа сил, приводящихся к одной равнодействующей , приходим к равенству:
 (4.9)
(4.9)
Выражение (4.9) является математической интерпретацией (представлением) теоремы Вариньона.
4.6. Графический способ сложения системы сил, расположенных в одной плоскости. Условия равновесия
В предыдущих параграфах настоящей главы рассмотрены теоремы о приведении плоской системы сил к заданному центру. В результате получены векторное выражение для определения главного вектора и алгебраическое выражение для определения главного момента, т.е. выражения (4.3) и (4.4).
Покажем, что модуль, направление и линия действия равнодействующей плоской системы сил могут быть определены графическим способом, т.е. путем построения силового и веревочного многоугольников. Этот способ предложен Кульманом и называется способом "веревочного многоугольника".
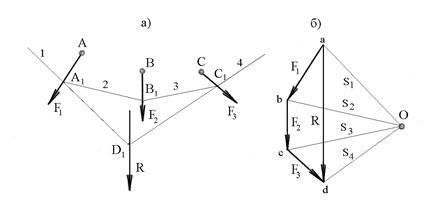
Рис.4.5
Пусть заданы три силы , и  , приложенные к телу в точках А, В, С соответственно и расположенные в одной плоскости (рис.4.5,а). Найдем величину и направление равнодействующей заданных сил. Для этого зададимся подходящим масштабом сил
, приложенные к телу в точках А, В, С соответственно и расположенные в одной плоскости (рис.4.5,а). Найдем величину и направление равнодействующей заданных сил. Для этого зададимся подходящим масштабом сил  и построим силовой многоугольник аbcd (рис.4.5,б) в следующем порядке: из произвольной точки а плоскости действия сил откладываем отрезок аb геометрически равный силе , из полученной точки b откладываем в том же масштабе отрезок bc геометрически равный силе , затем откладываем отрезок cd геометрически равный силе . Замыкающий вектор аd силового многоугольника, проведенный из начала первой силы в конец последней представляет равнодействующую трех заданных сил. Модуль равнодействующей определяется измерением отрезка ad в принятом масштабе сил, т.е.
и построим силовой многоугольник аbcd (рис.4.5,б) в следующем порядке: из произвольной точки а плоскости действия сил откладываем отрезок аb геометрически равный силе , из полученной точки b откладываем в том же масштабе отрезок bc геометрически равный силе , затем откладываем отрезок cd геометрически равный силе . Замыкающий вектор аd силового многоугольника, проведенный из начала первой силы в конец последней представляет равнодействующую трех заданных сил. Модуль равнодействующей определяется измерением отрезка ad в принятом масштабе сил, т.е.  . Направление равнодействующей должно быть противоположным направлениям сторон силового многоугольника, геометрически равных заданным силам.
. Направление равнодействующей должно быть противоположным направлениям сторон силового многоугольника, геометрически равных заданным силам.
Построенный многоугольник аbcd называется планом сил и дает возможность определить величину и направление равнодействующей .
Остается найти точку приложения равнодействующей. Для этого необходимо построить веревочный многоугольник. Возьмем произвольную точку О вблизи плана сил (рис.4.5,б) и соединим её с вершинами многоугольника сил аbcd . Точка О называется полюсом, а прямые Оа, Ob, Ос, Оd - лучами многоугольника сил. Обозначим их буквами  ,
,  ,
,  ,
,  и обратим внимание на то, что каждая сторона (сила) многоугольника аbcd, включая равнодействующую , расположена между двумя лучами (рис.4.5,б). Например, сила , заключена между лучами и .
и обратим внимание на то, что каждая сторона (сила) многоугольника аbcd, включая равнодействующую , расположена между двумя лучами (рис.4.5,б). Например, сила , заключена между лучами и .
Обратимся теперь к рис.4.5,а и проведем через произвольную точку А1 взятую на линии действия силы ,, прямые I и 2, соответственно параллельные лучам и . Продолжим прямую 2 до пересечения с линией действия силы точке B1 и проведем из этой точки прямую 3 параллельную лучу до пересечения с линией действия силы в точке C1. Через точку С1 проводим прямую 4 параллельную лучу . Продолжим затем прямые I и 4 до их пересечения в точке D1. В результате получим многоугольник А1В1С1D1, называемый веревочным многоугольником. Его стороны соответственно параллельны лучам силового многоугольника (плана сил).
Опуская доказательство, укажем, что линия действия равнодействующей проходит через точку D1, а её точка приложения может быть выбрана произвольно на её линии действия. Используя изложенный выше способ, можно определить равнодействующую произвольного числа сил, расположенных в одной плоскости.
При определении равнодействующей системы сил графическим способом может оказаться, что силовой и веревочный многоугольники замкнуты. В этом случае равнодействующая заданных сил равна нулю, т.е. заданные силы находятся в равновесии.
Дата добавления: 2018-11-26; просмотров: 1549;
Поиск по сайту
Узнать еще
- Andantino con moto А. Бородин. Для берегов отчизны дальней
- C) Теорема затухания (Теорема смещения)
- F45.38 другие органы или системы
- I тип реакций. Реакции, характерные для органических кислот.
- I. 5. Тесты для контроля знаний раздела I
- I. История возникновения и развития классно-урочной системы.
- I. Развитие Донбасса в условиях кризиса феодально-крепостнической системы
- I. Создание системы управленческого учета.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
