В.0 Поворот мобота на колесном ходу.
В Основные сведения из теории поворота шасси.
Выбор типа движителя (колёсного, гусеничного, либо иного) происходит на ранней стадии проектирования из условий обеспечения опорной и профильной проходимости мобильного робота, а также других требований технического задания и с точки зрения системы управления прямолинейным движением не имеет больших отличий.
Однако при осуществлении поворота система управления для различных типов движителей будет иметь существенные отличия, предельно простая для гусеничного движителя и с возрастающей сложностью для колесного шасси в зависимости от числа управляемых колёс.
При этом следует заметить, что сигналы управления на различные колёса имеют сложную взаимозависимость, определяемую режимом движения, положением колеса на шасси, радиусом поворота и рядом других параметров, определяющих поворот.
В.0 Поворот мобота на колесном ходу.
Рассмотрим криволинейное движение мобота, необходимое для анализа и расчёта двух эксплуатационных свойств: поворачиваемости и устойчивости. Так как скорости передвижения моботов в основном незначительны (<3 м/сек) и не достигают критических скоростей, при которых система теряет устойчивость [ ], то параметры устойчивости движения в данном разделе не рассматриваются.
Рассмотрим более подробно поворачиваемость мобота, то есть свойство совершать повороты с заданной кривизной. Оно определяет принципиальную возможность поворота мобота, т.е. движение его по задаваемой оператором или бортовой вычислительной системой криволинейной в плане траектории. Чем больше кривизна (  - прямая) возможной траектории движения, т.е., чем меньше радиус поворота мобота, тем лучше её поворачиваемость.
- прямая) возможной траектории движения, т.е., чем меньше радиус поворота мобота, тем лучше её поворачиваемость.
Таким образом, основным показателем оценки поворачиваемости является радиус поворота мобота.
За расчётный радиус поворота Rn примем расстояние от мгновенного центра поворота до продольной оси мобота. Зная положение проекции мгновенного центра на продольной оси мобота, называемой полюсом поворота, можно определить любой другой радиус, в частности радиус поворота по забегающей гусенице или по переднему наружному колесу, который обычно приводится в технических характеристиках.
Минимальный радиус поворота является параметром оценки статической поворачиваемости мобота. Этот параметр наиболее важен, однако не даёт исчерпывающей характеристики поворачиваемости. В ряде случаев важным является не только сам факт поворота с определённым радиусом, но и то, за какое время и на какой угол (или полный разворот, т.е. на 180°) сможет повернуть мобот или на сколько снизится его скорость в процессе поворота в сравнении с прямолинейным движением. Эти данные характеризуют уже динамическую поворачиваемость мобильного робота.
Основные способы поворота мобота следующие:
1) изменение плоскости вращения колёс по отношению к продольной оси мобота за счёт поворота управляемых колёс (рис. 10);
2) изменение этих же углов за счёт изменения положения части машины по отношению к другой её части (рис. 11) (сочленённые моботы);
3) изменение величины скоростей колёс или гусениц разных сторон (левого и правого бортов);
4) смешанный способ, сочетающий элементы всех вышеперечисленных.
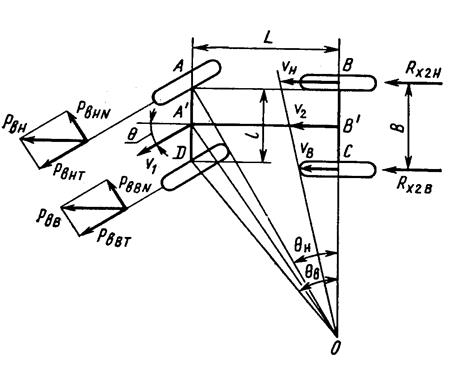
Рис.11. Схема поворота машины с жёсткими управляемыми колёсами.
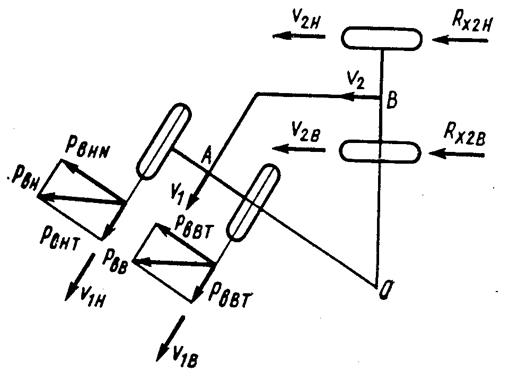
Рис. 12. Схема поворота сочленённой машины с жёсткими колёсами.
При повороте колёсного мобота, где угол поворота управляемых колес редко превосходит 30°, достаточно обеспечить передачу на ведущие управляемые колёса достаточной толкающей силы Р от ведущих колёс то есть обеспечить соотношение
 , ( 40 )
, ( 40 )
где
 ,
,  - соответственно нагрузка на ведомую управляемую и ведущую ось.
- соответственно нагрузка на ведомую управляемую и ведущую ось.
Поскольку векторы V1 и V2 (рис. 10, рис. 11) не параллельны, происходит криволинейное движение (поворот) мобота.
При ведущих управляемых колёсах продольные реакции, направленные в плоскости вращения колёс, однозначно определяют направление скорости их перемещения.
Следует заметить, что при повороте мобота с колёсным движителем с заданным радиусом необходимо обеспечить два момента:
1) Обеспечение возможности создания достаточной силы тяги ведущих колёс, способной преодолеть возросшую в сравнении с прямолинейным движением силу сопротивления движению
 ( 41 )
( 41 )
где
 - коэффициент приращения удельной силы тяги при повороте;
- коэффициент приращения удельной силы тяги при повороте;
 - сумма дополнительных сил сопротивления движению;
- сумма дополнительных сил сопротивления движению;
 - сумма окружных сил колёс при прямолинейном движении.
- сумма окружных сил колёс при прямолинейном движении.
2) Должно быть обеспечено отсутствие скольжения (буксования) не менее двух колёс мобота, из которых хотя бы одно должно быть управляемым. Условия по поворачиваемости (по схемам 10, 11) с точки зрения затрат энергии практически не оказывают влияния на результаты тягового расчёта, так как приращение силы тяги в пределах 10-15° легко компенсируется снижением скорости движения.
При повороте по способу гусеничных машин (этот способ обеспечивает высокую маневренность, простоту управления поворотом и позволяет поворачиваться с нулевым радиусом вокруг центра масс) затраты энергии могут увеличиться в 2-3 раза в зависимости от разных факторов, что может существенно повлиять, как на результаты тягового расчёта, так и на весь облик мобота. Это обстоятельство вынуждает нас рассмотреть более подробно поворот гусеничного мобота.
Дата добавления: 2020-04-12; просмотров: 1077;
Поиск по сайту
Узнать еще
- А.4 Общее уравнение движения мобота.
- Алканы. Поворотная изомерия, конформации
- Б.3 Определение диапазона трансмиссии и скорости движения мобота.
- Б.5 Пример тягового расчёта мобота.
- В.1 Кинематика поворота гусеничного мобота.
- В.2 Момент сопротивления повороту и сила тяги на гусеницах.
- В.3 Зависимость момента сопротивления повороту от эпюры давления на грунт.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
