В.1 Кинематика поворота гусеничного мобота.
Поворот гусеничной машины относительно центра поворота О (рис. 12) осуществляется при различных скоростях забегающей и отстающей гусеничных цепей.
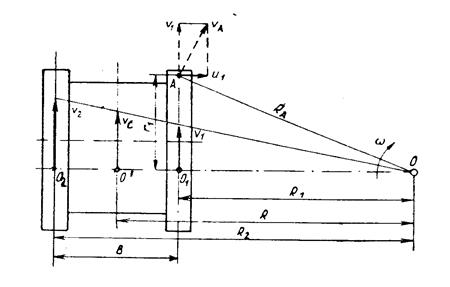
Рис. 13. План скоростей машины при повороте.
R,R1,R2 - радиусы поворота средней точки машины, отстающей и забегающей гусеничных цепей соответственно;
B - размер колеи машины.
Точки О1 и О2 (см. рис. 12), относительно которых происходит мгновенный поворот опорных ветвей, называются полюсами поворотов и располагаются на одной прямой, проведённой из центра поворота О перпендикулярно к продольной оси машины.
Относительные скорости перематывания цепей, а также равные им скорости V1 и V2 точек корпуса О1 и О2 направлены вдоль продольных осей соответствующих гусеничных цепей.
Изменение скорости движения гусеничных цепей осуществляется изменением частоты вращения приводов по бортам или механизмами поворота.
Если угловые скорости ведущих колёс обозначим w1 и w2, то получим
где
i21 - передаточное число между ведущими колёсами или передаточное число механизма поворота.
Очевидно, при повороте всегда i21>1.
Из подобия треугольников следует:
 ; ( 42 )
; ( 42 )
 ; ( 43 )
; ( 43 )
 ; ( 44 )
; ( 44 )
За единицу измерения радиуса поворота выбирают половину или всю ширину колеи машины. Тогда радиус поворота представляют в виде относительной величины
 или
или  ( 45 )
( 45 )
Остальные кинематические величины, определяющие поворот гусеничного мобота приобретают вид:
 ( 46 )
( 46 )
 (47)
(47)
угловая скорость поворота мобота
 (48)
(48)
Дата добавления: 2020-04-12; просмотров: 1070;
Поиск по сайту
Узнать еще
- А.4 Общее уравнение движения мобота.
- Б.3 Определение диапазона трансмиссии и скорости движения мобота.
- Б.5 Пример тягового расчёта мобота.
- В.4 Мощность, затрачиваемая на поворот мобота.
- Вопрос 38. Кинематика поворота автомобиля.
- Г) зависимости момента от угла поворота ротора.
- Глава 6. Кинематика точки

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
