Регулирование скорости вращения асинхронных двигателей.
Скорость вращения ротора асинхронных двигателей определяют из выражения
N2 = n1 (1 – s) = 60f / р (l – s),
откуда следует, что скорость ротора можно регулировать, изменяя частоту тока питающей сети f, число пар полюсов статорной обмотки р и величину скольжения s.
Регулирование скорости вращения путём изменения величины скольжения s можно применять только для двигателей с фазным ротором, для чего в цепь ротора вводят регулировочный реостат. Плавное изменение сопротивления этого реостата приводит к плавному изменению величины скольжения и, следовательно, - скорости вращения двигателя. Таким способом можно регулировать скорость вращения только нагруженного двигателя в пределах от 1 до 0,7 номинальной скорости вращения ротора. В режиме холостого хода изменение активного сопротивления цепи ротора почти не влияет на скорость вращения.
Рассмотренный способ регулирования имеет два недостатка: большие потери энергии в реостате и сильное влияние тормозного момента на скорость вращения. Однако этот способ регулирования получил широкое распространение.
Регулирование скорости изменением числа пар полюсов не позволяет получать плавного изменения скорости вращения. Этот способ применяется в основном у двигателей с короткозамкнутой обмоткой ротора и даёт возможность осуществлять лишь ступенчатое регулирование, что легко установить из выражения для скорости вращения магнитного поля n = 60f / р. При частоте тока f = 50 гц и различных значениях числа пар полюсов р можно получить 3000, 1500, 1000, 750 и 600 об/мин. Промышленность выпускает многоскоростные асинхронные двигатели, у которых каждая фаза статорной обмотки состоит из нескольких отдельных частей. Соединение этих частей различным способом даёт возможность изменять число пар полюсов, следовательно, и скорость вращения двигателя.
Многоскоростные асинхронные двигатели применяют в подъёмно-транспортных механизмах, насосах и других установках, в которых не требуется плавность регулирования скорости. В тех случаях, когда необходимо плавное регулирование скорости электропривода, могут быть использованы системы электромеханического регулирования скорости вращения (например, механические вариаторы, электромагнитные муфты скольжения, порошковые муфты и другие). В качестве примера рассмотрим схему электропривода серии ПМС с асинхронным двигателем и электромагнитной муфтой скольжения (рис.56 а).
Муфта скольжения – 1 состоит из ведущего массивного якоря – Я и индуктора – И с катушкой возбуждения – К. Якорь муфты соединён валом – 2 приводного двигателя, а индуктор с валом рабочего механизма – 3. В катушку возбуждения индуктора через контактные кольца – 4 подаётся постоянный ток Iн от выпрямителя – 5.
Приводной двигатель вращает якорь электромагнитной муфты с постоянной скоростью. При этом якорь пересекает магнитные силовые линии, созданные током Iн катушки возбуждения индуктора, и в нём возникают вихревые токи. В результате взаимодействия этих токов с магнитным полем появляются электромагнитные силы, увлекающие индуктор, а с ним и ведомый вал рабочего механизма. Так же, как и в асинхронном двигателе, индуктор вращается медленнее якоря. Величину скольжения муфты определяют по формуле:
S = (n1 – n2) / n1
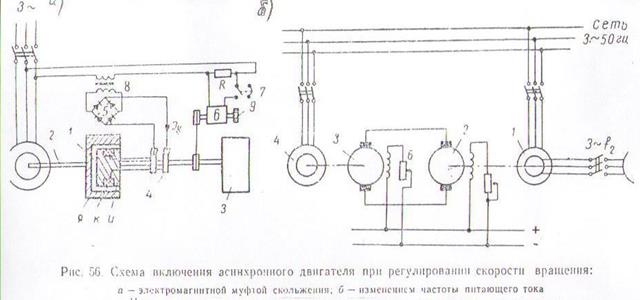
Для плавного регулирования скорости вращения индуктора необходимо изменить ток возбуждения Iв. Повышение жёсткости механических характеристик привода обеспечивается центробежным регулятором – 6 путём автоматического изменения тока возбуждения индуктора. Если скорость вращения вала рабочего механизма меньше заданной, контакты – 7 центробежного регулятора замыкаются, шунтируя сопротивление R. В этом случае через катушку возбуждения индуктора пойдёт максимальный ток и скорость вращения индуктора возрастёт. Наоборот, при увеличении скорости вращения вала контакты центробежного регулятора размыкаются и ток, проходящий через первичную обмотку трансформатора – 8, уменьшается. При этом ток возбуждения Iв падает, индуктор вращается медленнее, контакты центробежного регулятора снова замыкаются и т.д. В рассмотренной схеме контакты замыкаются и размыкаются от 10 до 40 раз в секунду, что позволяет поддерживать скорость вращения вала рабочего механизма фактически равной заданной скорости, устанавливаемой поворотом рукоятки – 9 центробежного регулятора.
Регулирование скорости изменением частоты тока, питающего обмотку статора асинхронного двигателя, позволяет получить плавное регулирование в широких пределах. При этом способе используется преобразователь частоты тока (рис. 56 б), состоящий из асинхронного преобразователя частоты – 1, двигателя – 2, генератора – 3 постоянного тока и асинхронного двигателя – 4.
Асинхронный двигатель – 4, питаемый из сети током нормальной частоты f = 50 гц, приводит во вращение генератор постоянного тока – 3, служащий источником электрической энергии для двигателя постоянного тока – 2. Этот двигатель вращает асинхронный преобразователь – 1, являющийся источником электрической энергии переменной частоты для асинхронного двигателя привода – 5. При помощи регулировочного реостата – 6 изменяется напряжение генератора и, следовательно, скорость вращения двигателя постоянного тока. Это в свою очередь вызывает изменение частоты тока f2, вырабатываемого асинхронным преобразователем – 1.
Рассмотренный частотный способ регулирования скорости вращения двигателя требует сложной и дорогостоящей аппаратуры и применяется главным образом для одновременного регулирования скорости группы асинхронных двигателей.
Дата добавления: 2016-06-22; просмотров: 4079;
Поиск по сайту
Узнать еще
- I.3.4 ВЗАИМНЫЕ ПРЕВРАЩЕНИЯ ЖИДКОСТЕЙ И ГАЗОВ
- I.5.3 КОСМИЧЕСКИЕ СКОРОСТИ
- Pиc. 67. Зависимость скорости осаждения от величины катодно-анодного отношения
- VI. Гемецеллюлозы и их превращения.
- VII. Регулирование частоты вращения двигателя
- Абсолютные скорости изменения критериев оценки УБП
- Автоматическое регулирование (РОУ) редукционно-охладительных установок.
- Автоматическое регулирование в области дуговой сварки

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
