Определение геометрических и кинематических показателей ПP
Для опенки выбранной кинематической схемы ПР и ее параметров в практику проектирования введены некоторые геометрические и кинематические показатели.
Для обхода препятствий и выполнения сложных движений (ЗУ) необходимо предусмотреть дополнительные возможности кинематической цепи ПР. Эти возможности можно оценить кинематическим показателем — так называемой маневренностью ПР, обозначаемой Wм и равной числу степеней подвижности кинематической цепи ПР при фиксированном положении ЗУ.
Маневренность зависит от вида и числа кинематических пар и их взаимного расположения. Например, кинематическая цепь на рис. 31, а имеет маневренность, равную единице (Wм = 1). Это означает, что подвижные звенья 1 и 2 кинематической схемы имеют одну дополнительную степень подвижности при фиксированном положении звена 3 (кисти). Для получения этой дополнительной подвижности в точках А и С введены кинематические пары в виде шаровых шарниров. Такая дополнительная подвижность позволяет подвести кисть с ЗУ в заданную точку Е (например, в процессе сборки) при различных положениях звеньев 1 и 2, необходимых для обхода препятствий, ограниченных стенками I — I и II — II. Последовательные положения звеньев 1 и 2 образуют конические поверхности с вершинами в точках А и С и образующими конусов АВ и СВ.
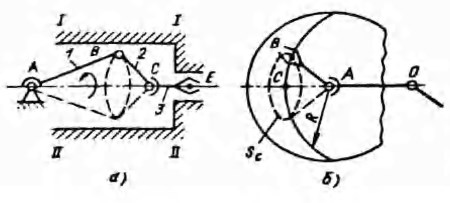
Рис. 31. Схема для определения геометрических и кинематических показателей ПР
Чем больше значение маневренности WM, тем большими возможностями обладает кинематическая цепь ПР для выполнения сложных движений рабочего органа кратчайшим, наиболее рациональным путем (например, сборку и обработку в условиях замкнутого пространства).
Для обобщенной оценки геометрических качеств ПР рассматриваются так называемые угол сервиса и коэффициент сервиса. Эти показатели характеризуют возможность подхода ЗУ к заданной точке с разных направлений, т.е. дают представление о двигательных возможностях кинематической цепи ПР.
Число степеней подвижности на рабочем органе ПР определяет его положение в пространстве, причем эта часть пространства ограничена и зависит от вида кинематических пар и длин звеньев, определяющих положение ЗУ. Если кисть (рис. 31, б) имеет центр вращения А и длину АВ, то возможные положения центра В ЗУ в данной точке рабочей зоны определяются пространственным (телесным) углом — углом сервиса (обслуживания) ПР. Это такой угол, внутри которого ЗУ может подойти к точке С рабочей зоны.
Из геометрии известно, что значение телесного угла равно отношению площади сферы Sс, вырезанной телесным углом, к квадрату радиуса сферы: ψ = Sc/R2. Максимальное значение телесного угла может быть найдено, если будем считать, что центр ЗУ, перемещаемого с кистью на шаровом шарнире А, может описать полную сферическую (шаровую) поверхность. Так как поверхность шара Sc = 4πR2, то ψmax = 4πR2/R2 = 4π. Кинематические схемы ПР могут иметь различные углы сервиса ψ.
Для определения качеств схемы введен коэффициент сервиса. Его значение определяется по углу сервиса ψ, вычисленному по размерам кисти и ЗУ для данной точки рабочей зоны. Числовое значение коэффициента сервиса определяется как отношение: кс = ψ/ψmax = ψ/(4π), где ψ — угол сервиса, вычисленный для данной точки рабочей зоны.
Значение кc может измениться от нуля на границе рабочей зоны (где ось кисти может занимать только одно положение) до единицы. Это значение кc соответствует зоне полного сервиса (в этих точках ось кисти может занимать любое пространственное положение). В связи с этим при выборе кинематической схемы ПР надо стремиться получить значение кс = 1.
Дата добавления: 2024-10-05; просмотров: 505;
Поиск по сайту
Узнать еще
- Анемии. Определение и принципы классификации
- Выбор кинематических схем и кинематических параметров ПР
- Зрительная труба. Ход лучей в трубе. Прибор для измерения угла зрения. Определение углового увеличения
- Лупа. Определение увеличения лупы. Самодельные лупы
- Объемы земляных масс. Определение объема отсеков земляного полотна
- Одноплоскостные деформации позвоночника (определение, принципы коррекции)
- Определение необходимой протяженности спондилодеза

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
