Состав и функции бортовой аппаратуры МАЛС
Исходной информацией для бортовой аппаратуры (БА) МАЛС являются функциональное состояние аппаратуры, тип и номер локомотива, диаметр колесной пары, состояние электрооборудования локомотива (положение контроллера, реверсора и т д), число импульсов на один оборот колеса, название станции, тип системы, в которой работает станция, и маршрутное задание (эта информация передается станционной аппаратурой по цифровому каналу радиосвязи).
В состав БА MAЛC входят (рис. 3.2):
бортовой компьютер;
клавиатура KB;
блок переключателей, предназначенный для сопряжения с сигналами контроля и управления локомотива;
блок индикации;
датчики импульсов с платой контроллера КДИ;
приемо-передающее устройство (радиомодем);
антенное оборудование;
плата питания ПП.
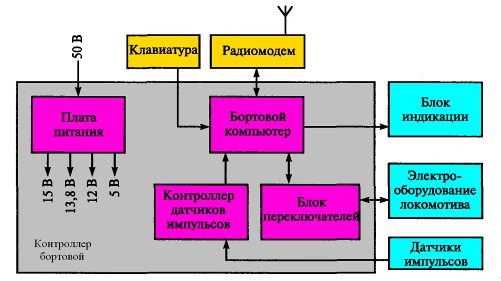
Рис. 3.2. Структурная схема бортовой аппаратуры
Конструктивно основные блоки БА MAЛC располагаются в одном корпусе и соединяются с другими блоками кабелями. Датчики импульсов, предназначенные для определения скорости и направления движения, закрепляются на буксах 2 и 5 колесных парах локомотива.
Плата электропитания с первичным напряжением 50В подключается к аккумуляторной батарее локомотива; ее выходными номиналами являются: + 5В (3А); + 12В (2,5А); + 13,8В (2А) и + 15В (1А).
Для дальнейшего рассмотрения функционирования БА MАЛC вводятся понятия пост, телеграмма и маршрут. Пост - станционная часть системы MAЛC; телеграмма - единица блока данных, несущая в себе информацию по какой-либо команде поста или ответа на команду, в одной посылке по радиоканалу может содержаться несколько телеграмм. Маршрут - поэлементно заданный путь движения локомотива с указанием характеристик каждого элемента, общей длины пути и количества свободных изолированных секций. Элементами маршрута могут быть отрезки пути, стрелки и светофоры. Характеристики элемента специфичны для каждого типа, но основными являются их длина и максимальная допустимая скорость движения по ним (для путей и стрелок).
3.3. Режимы работы системы МАЛС
Технология системы MAЛC предусматривает три режима работы локомотива:
ручной - связь с постом отсутствует и управление локомотивом осуществляется в обычном режиме. На мониторе отображается только текущая скорость и общее пройденное расстояние;
автономный - локомотив находится на связи с постом и готов принимать телеграммы маршрута, в целом движение локомотива автономно;
телеуправления - локомотив находится под полным контролем поста и движется по установленному маршруту с заданной на каждой изолированной секции допустимой скоростью.
Режим телеуправления является основным при работе в системе MAЛC и обеспечивает заданный уровень безопасности маневровых работ. В этом режиме программа БА MAЛC отслеживает ряд критических с точки зрения безопасности ситуаций:
самопроизвольное движение локомотива - начало движения локомотива без сигнала тяги или движение в направлении, противоположном заданному;
превышение допустимой скорости движения;
проезд запрещающего сигнала светофора;
движение по занятому пути;
движение на участках с ограничениями (на участках, где ведутся путевые работы или временно введены ограничения по скорости).
При самопроизвольном движении локомотива (появлении фактической скорости движения без включения тяги), попытке проезда запрещающего сигнала, места производства работ или без сообщения путь свободен в управляющей цепи локомотива включается сигнал экстренной остановки.
Если во время выполнения маршрутного задания разность между допустимой и фактической скоростями становится менее 5%, то по команде блока БК отключается режим тяги. Если фактическая скорость становится равной допустимой, то происходит срыв ЭПК.
При движении по занятому пути или по участкам пути с ограничениями включается периодическая проверка бдительности машиниста. Если машинист не нажмет рукоятку бдительности произойдет экстренная остановка локомотива.
При подъезде к запрещающим сигналам светофора, участкам пути с ограничениями или при заезде на занятый путь реализуется алгоритм торможения и остановки локомотива.
3.4. Перспективы развития системы MAЛC
В настоящее время система выполняет основные задачи обеспечения безопасности при выполнении маневровой работы на станции и запрещения проезда закрытого сигнала. Дополнительно она может информировать машиниста о негабаритных местах и местах работ на путях в заданном маршруте, допустимой скорости движения и т д.
Кроме того, конструкторские решения MAJIC создали предпосылки к интеллектуальному ее наполнению и превращению в систему нижнего уровня для формирования и передачи исходных данных в вышестоящие компьютерные системы, облегчения и изменения технологии работы дежурного по станции, маневрового диспетчера, электромеханика СЦБ. Создана основа для разработки новых программно-технических комплексов, обеспечивающих получение в локомотивном депо оперативной информации и создание единой информационной базы по техническому и функциональному состоянию локомотивов, оборудованных аппаратурой КЛУБ, MAЛC, горочной AJIC и другими системами.
Следующим этапом развития БА MAЛC является введение в его состав средств аудиоподдержки выдаваемых на экран показаний и сообщений, управление тормозной системой локомотива, повышение интеллектуальной составляющей программного обеспечения.
Система MAЛC с новой версией ПО обеспечивает выполнение следующих функций:
защита ПО системы от несанкционированного доступа;
сопровождение работы системы голосовыми сообщениями (станционная аппаратура);
ввод информации о технико-распорядительном акте (ТРА) станции и о локомотиве;
прием от устройств ЭЦ информации о состоянии рельсовых цепей, светофоров и положении стрелок;
контроль состояния контроллера локомотива;
измерение фактической скорости и направления движения локомотива;
ввод и вывод локомотивов из системы;
обмен сообщениями по цифровому радиоканалу связи между станционными устройствами и локомотивами;
определение соответствия маршрута и локомотива;
установка и коррекция маршрутного задания;
создание маршрутов с учетом запрещающего сигнала;
назначение и отмена места производства работ на любом элементе станции;
остановка локомотива по приказу ДСП, при потере связи или отмене маршрута;
идентификация кратковременной потери связи и сохранение передаваемой информации;
контроль допустимой скорости движения при выполнении маршрутных заданий;
выключение тяги при приближении фактической скорости движения к допустимой;
контроль ограничения скорости на местах производства работ;
запрос подтверждения видимости машинистом вагонов на занятом пути и мест производства работ;
смена режимов работы локомотива по приказу станционных устройств и запросу машиниста локомотива;
измерение длины состава;
определение расстояния до мест производства работ;
контроль проезда хвостовым вагоном состава последнего пройденного стыка в маршрутном задании;
контроль движения состава в пределах последней занятой секции маршрутного задания относительно его головы и хвоста;
выполнение приказов ДСП на проезд запрещающего сигнала;
включение проверки бдительности машиниста;
срыв ЭПК при неисправностях или отключениях локомотивной аппаратуры;
срыв ЭПК при превышении допустимой скорости движения;
срыв ЭПК при подъезде к препятствию или месту работ в случае отсутствия подтверждения от машиниста о получении предупреждения;
срыв ЭПК при попытке проезда запрещающего сигнала либо по приказу станционных устройств или ДСП;
срыв ЭПК при попытке проезда стыков в пределах занимаемой изолированной секции;
регистрация смен ДСП в журнале системы MAЛC;
ведение записей в журнале системы MAЛC о событиях, происшедших на станциях, и функциональном состоянии локомотивной аппаратуры.
4. Комплексное локомотивное устройство безопасности (КЛУБ)
4.1. Назначение, структурная схема и принцип действия КЛУБ
Комплексное локомотивное устройство безопасности предназначено для повышения безопасности движения за счет:
приема сигналов от путевых устройств АЛСН;
отображения машинисту информации о показаниях впереди находящихся светофорах и свободности блок-участков;
измерения и отображения машинисту скорости движения;
исключения несанкционированного движения локомотива;
контроля торможения перед светофором с запрещающим показанием;
контроля бодрствования и бдительности машиниста;
формирования сигналов на ЭПК;
формирования сигналов на локомотивные скоростемеры.
В состав аппаратуры КЛУБ входят (рис. 4.1):
блок электроники локомотивный БЭЛ2М;
блок коммутации БК;
блок индикации локомотивный БИЛ2М;
катушки приемные КПУ2;
датчики пути и скорости ДПС Л178;
блок оптронный БО;
блок согласования с системой САУТ БСС;
комплект рукояток РБ, РБС, кнопки ВК и переключателя М/П;
блок ввода и диагностики локомотивного оборудования БВД.
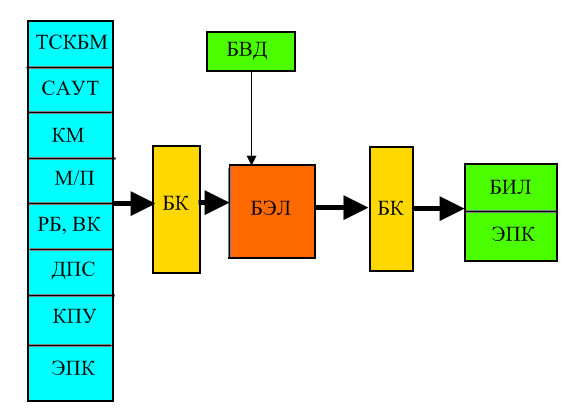
Рис. 4.1. Структурная схема КЛУБ
БЭЛ - блок электроники локомотивный, БК - блок коммутации, БИЛ - блок индикации локомотивный, КПУ - катушки приемные, ДПС - датчики пути и скорости, БВД - блок ввода и диагностики локомотивного оборудования, РБ - рукоятка бдительности, ВК - кнопка выключение красного, М/П - переключатель режимов маневровый/поездной, КМ - контроллер машиниста
Питание блоков КЛУБ производится от аккумуляторной батареи с номинальным напряжением 50, 75 или 110В; сигналы от ВК, РБ, РБС, М/П, 0 контроллера и ключа ЭПК имеют номинальный уровень 50В.
Сигналы путевых устройств АЛСН, проходящие по рельсовой цепи наводят ЭДС в приемных катушках КПУ2, которая поступает через БК на входы блока БЭЛ2М, где производится их прием и обработка.
На блок БЭЛ2М через БК поступают сигналы от двух датчиков угла поворота Л178, ТСКБМ, САУТ, рукояток РБ и РБС, переключателя маневрового и поездного режимов, ключа ЭПК, контактов контроллера.
В блоке БЭЛ2М производится постоянное сравнение фактической скорости со значениями допустимой и контролируемой скоростей.
При превышении контролируемой скорости и отсутствии системы САУТ осуществляется периодический контроль бдительности машиниста включением сигнала внимание и через 6с снятие напряжения с электромагнита ЭПК. При нажатии рукоятки бдительности индикация сигнала внимание прекращается, питание электромагнита ЭПК восстанавливается.
При превышении допустимой скорости включается сигнал внимание и снимается напряжение с электромагнита ЭПК. Нажатие на РБ в этом случае не отменяет сигнала внимание и не восстанавливает питание электромагнита ЭПК.
Локомотивные устройства КЛУБ исключают несанкционированное движение локомотива, осуществляя при каждом движении (переходе значения фактической скорости Vф = 0 в Vф ≠ 0) дополнительный контроль бдительности.
Контроль бодрствования осуществляется от телеметрической системы контроля бодрствования машиниста ТСКБМ, контроль бдительности осуществляется по реакции машиниста на световой или звуковой сигнал.
Для исключения опасных отказов основные узлы устройств обработки сигналов в блоке БЭЛ2М выполнены в двухканальном варианте со схемой контроля, не имеющей опасных отказов. Для повышения надежности ячейка ЦК, ячейка подключения, усилитель ЭПК, источник питания в блоке БЭЛ2М резервируются. При обнаружении отказа происходит автоматический переход на резервный комплект.
Дата добавления: 2016-05-28; просмотров: 7873;
Поиск по сайту
Узнать еще
- I. Общие принципы структурно-функциональной организации клетки и её компоненты. Плазмолемма, её структура и функции.
- II. Митохондрии (строение и функции)
- II. Признаки, ресурсы и функции власти.
- III. Функции отдела по делам ГОЧС и ВМР
- III. Функции политологии. Возрастание роли политических знаний в жизни общества.
- IV. Права и обязанности личного состава службы
- Table 1. Функции ГИС для лесного хозяйства и лесоустройства
- V. Подготовка личного состава службы

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
