Релейно-контакторные системы управления
Эти системы применяют для управления нерегулируемыми и регулируемыми элект-
роприводами.
Нерегулируемые электроприводы имеют только одну скорость, регулируемые – две
и более.
Системы управления нерегулируемых электроприводов чаще всего состоят из испол
нительного двигателя и нереверсивного ( реверсивного ) магнитного пускателя или магнитной станции ( станции управления ).
Снаружи корпуса ( коробки ) нереверсивного пускателя расположены кнопки управления «Пуск» и «Стоп», реверсивного – кнопки «Вперед», «Стоп» и «Назад».
Внутри нереверсивного пускателя находится один контактор, который называ-
ется линейным, т.к. при его включении обмотка статора асинхронного двигателя под
ключается к питающей сети при помощи линии электропередачи – кабеля.
Внутри реверсивного пускателя находятся два контактора, которые называются реверсивными, т.к. при их переключении двигатель реверсирует.
Контактором называется электромагнитный аппарат дистанционного дейст-
вия, предназначенный для коммутации силовых цепей электродвигателей.
К нерегулируемым относятся электроприводы насосов, вентиляторов, компрес-
соров и др. с одной скоростью.
Системы управления регулируемых электроприводов состоят из исполнительного двигателя, командоконтроллера, станции управления и, при необходимости, ящиков с регулировочными резисторами.
Командоконтроллер – это аппарат управления ручного действия, предназначен-
ный для коммутации ( переключения ) цепей управления. К цепям управления отно-
сятся цепи катушек контакторов и реле.
На судах, как правило, применяют кулачковые командоконтроллеры с рукоят-
кой управления, расположенной сбоку корпуса командоконтроллера.
Командоконтроллеры, так же как и контроллеры, располагают в непосредствен-
ной близости от электропривода, что позволяет оператору осуществлять непрерывный кон-
троль за работой электропривода.
Конструктивно магнитная станция или станция управления – это металличе-
ский ящик с дверцами, внутри которого находятся коммутационно-защитные аппараты – контакторы, электромагнитные реле, автоматические выключатели, предохранители, тепловые реле и др.
Регулировочные резисторы включаются в силовые цепи электродвигателей и мо
гут находиться под током в течение продолжительного времени. Конструктивно сек-
ции регулировочных резисторов собираются в виде т.н. ящиков сопротивлений.
Магнитные станции и ящики сопротивлений размещаются в закрытых служеб-
ных помещениях, например, в электроприводе брашпиля – под палубой полубака ( т.е. на главной палубе ) и имеют закрытое от капежа исполнение ( IP 23 )/
Релейно-контакторные системы применяют для управления электроприводами
грузоподъемных механизмов ( грузовые лебедки и краны ) и якорно-швартовных уст-
ройств ( брашпили, шпили ) и др.
Характерной особенностью этой системы управления является то, что исполнительные двигатели, приводящие в движение механизмы, получают питание непосредственно от судовой сети.
Электромашинные системы управления
Электромашинной называется система управления, в которой между судовой сетью и исполнительным двигателем находится электромашинный преобразователь.
Электромашинным преобразователем называется двухмашинный агрегат, состоящий из приводного двигателя и генератора.
Приводной двигатель получает питание от судовой сети и вращает генератор. напряжение которого далее поступает к исполнительному двигателю.
На судах с электростанциями переменного тока в качестве приводных используют
ся 3-фазные асинхронные двигатели.
В качестве генераторов используют такие типы генераторов:
1. генераторы постоянного тока с независимым возбуждением нормального ( т.е. не специального ) исполнения;
2. синхронные генераторы переменного тока.
Различают следующие виды электромашинных систем управления:
1. система генератор – двигатель ( Г – Д ) ( см. ниже раздел 3. «Автоматизирован
ные электроприводы судовых технических средств» );
2. система Г - Д с питанием цепей возбуждения от электромашинного усилителя
( ЭМУ ), изображена на рис. 2.59, а. Электромашинные усилители ( ЭМУ ) представляют собой генератор постоянного тока независимого возбуждения специального исполнения.
3. система Д – СГ – АД ( приводной двигатель – синхронный генератор – исполнительный асинхронный двигатель ), изображена на рис. 2.59, б.
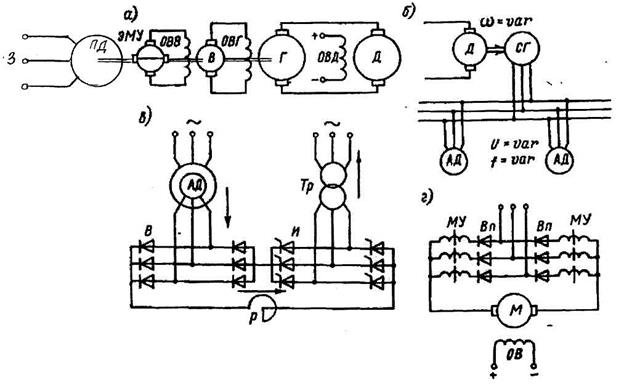
Рис. 2.59. Система Г- Д с каскадным возбуждением ( а ), система Д – Г – АД
( б ), асинхронно-вентильный каскад ( в ) и система МУ – Д ( г )
Систему генератор- двигатель( Г—Д ) применяют в электроприводах мощно-
стью свыше 70…80 кВт с плавным регулированием скорости в широких пределах – тяже-
ловесные лебедки и краны, брашпили, гребные электрические установки и др.
В этой системе генератор и исполнительный двигатель – это машины постоянного тока, цепи возбуждения которых питаются от возбудителя - генератора постоянного тока смешанного возбуждения нормального исполнения. Мощность возбудителя – не более 10% от мощности генератора..
В системе Г—Д с питанием цепей возбуждения от ЭМУ в качестве возбудителя
или подвозбудителя используется электромашинный усилитель - генератор постоянного тока независимого возбуждения специального исполнения.
Подвозбудителем называют генератор постоянного тока небольшой мощности, предназначенный для питания цепей возбуждения не генератора Г , а возбудителя генера
тора В ( рис. 2.59, а ).
В схеме на рис. 2.59, а якоря электромашинного усилителя ЭМУ, возбудителя генератора В и самого генератора Г сидят на одном валу с приводным асинхронным двигателем ПД.
Суть управления электроприводом в такой системе состоит в следующем: при изменении тока в независимой обмотке возбуждения ЭМУ ( не показана ) напряжение на выходе ЭМУ также изменяется, поэтому изменяется ток в обмотке возбуждения ОВВ воз-
будителя генератора ОВГ. В результате напряжение генератора Г изменяется, что приводит к изменению скорости исполнительного двигателя Д.
Таким образом, в данной схеме используются два возбудителя:
1. подвозбудитель ЭМУ , предназначенный для возбуждения возбудителя генерато-
ра В;
2. возбудитель генератора В, предназначенный для возбуждения непосредственно генератора В.
Подобная двухступенчатая система возбуждения ( сначала возбуждается возбуди
тель, который, в свою очередь, возбуждает генератор ), называется каскадной системой возбуждения.
Она применяется для возбуждения крупных генераторов и двигателей и позволяет уменьшить габаритные размеры аппаратов и облегчить процесс управления.
На рис. 2.59, а , генератор приводится во вращение приводным асинхронным двигателем. На судах с электродвижением, где мощность генератора составляет сот-
ни – тысячи кВт, причем генератор приводится во вращение дизелем.
Электромашинная система Д – СГ - АД ( двигатель – генератор – асинхрон-
ный двигатель ) применяют для плавного изменения скорости нескольких асинхронных двигателей в многодвигательных приводах с одинаковым режимом работы двигателей ( рис. 2.59, б ).
Суть управления электроприводом в такой системе состоит в следующем: при изме
нении скорости приводного двигателя постоянного тока Д изменяется частота тока на вы-
ходе синхронного генератора СГ, что, в свою очередь, приводит к изменению скорости исполнительных асинхронных двигателей АД.
Такие системы управления громоздки из-за наличия 2-х электрических машин ( приводной двигатель Д и синхронный генератор СГ ), имеют низкий коэффициент полез-
ного действия из-за двухкратного преобразования энергии ( в приводном двигателе элек-
рическая энергия превращается в механическую, в синхронном генераторе – механическая энергия превращается в электрическую ).
Поэтому настоящее время такие системы вытеснены статическими ( неподвиж-
ными ) бесконтактными системами, в которых используются тиристорные преобразо
ватели частоты.
Дата добавления: 2020-02-05; просмотров: 1726;
Поиск по сайту
Узнать еще
- B. Департаменты и управления функционального характера.
- F45.38 другие органы или системы
- I. История возникновения и развития классно-урочной системы.
- I. Развитие Донбасса в условиях кризиса феодально-крепостнической системы
- I. Создание системы управленческого учета.
- III. Филогенез эндокринной системы.
- IV. Движение поездов при неисправности электрожезловой системы и порядок регулировки количества жезлов в жезловых аппаратах
- L.3. Состояние российской системы образования и необходимость ее

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
