Микропроцессорные системы управления
Эти системы активно внедряются на современных судах.
Применяемые релейно-контакторные системы управления имеют в своем составе
командоконтроллер, предназначенный для переключения цепей управления.
В процессе эксплуатации порядок переключения этих контактов изменять нель
зя, т.е. для каждого отдельного электропривода нужен индивидуальный командоконт-
роллер. Иначе говоря, командоконтроллер, например, лебедки нельзя использовать для управления брашпилем.
Часто говорят, что контактные командоаппараты, в том числе командоконтрол-
леры, имеют «жесткую логику». Поэтому они не создают гибкости в работе и не реша-
ют задачи оптимизации процессов.
Такие недостатки отсутствуют у программируемых устройств логического управ
ления. К ним относятся микропроцессоры и построенные на их основе микроЭВМ, а также программируемые контроллеры ( ПК ).
Если в релейно-контакторных системах управления ЭП используют аналоговые регуляторы с фиксированными уставками срабатывания ( например, тепловые реле,
реле температуры, уровня и т.п. ), то в микропроцессорных системах применяется циф
ровая информация в двоичном коде.
Источником информации о состоянии электропривода являются датчики тока, напряжения, температуры, скорости и др.
Для обработки информации внутри микропроцессора сигналы с этих датчиков преобразуются в цифровой двоичный код при помощи аналого-цифровых преобразова-
телей ( АЦП ).
При этом процесс преобразования обычно осуществляется в 3 этапа:
1. преобразование сигналов разной физической природы ( тока, напряжения, температуры, скорости и т.п. ) в напряжение постоянного тока;
2. так называемая нормализация сигнала, имеющая целью улучшение качества сигнала, повышение достоверности содержащейся в сигнале информации.
Нормализация заключается в усилении сигнала, подавлении и фильтрации по-
мех, согласовании уровня сигнала с номинальным уровнем преобразователя аналог-код
3. собственно аналого-цифровое преобразование, которое заключается в преобра-
зовании напряжения постоянного тока после его нормализации в двоичный код.
В качестве примера рассмотрим структурную схему микропроцессорной системы управления тиристорным электроприводом ( рис. 2.61 ).
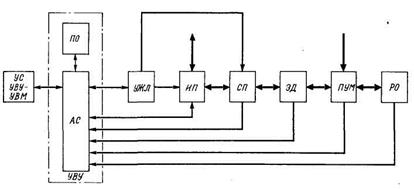
Рис. 2.61. Структурная схема микропроцессорной системы управления тиристор-
ным электроприводом
В состав микропроцессорной системы управления ЭП входят следующие блоки и
устройства:
1. устройство связи УС со старшей по иерархии ЭВМ ( например, с общесудо
вой на мостике или с оператором.
В УС используются преобразователи кодов, пульт управления с устройством отображения информации ( дисплеем, принтером и т.п. );
2. управляющее вычислительное устройство УВУ, состоящее из аппаратных
средств АС ( hard ware ) и программного обеспечения ПО (soft ware ).
Аппаратные средства ( т.н. «железо» ) - это комплекс жестко связанных между
собой логических автоматов, который за счет использования специальных программ становится функциональным узлом специфического применения.
В системе управления УВУ занимает центральное место, вырабатывая управляю
щие сигналы на основании директив, поступающих через УС от ЭВМ следующего по иерархии уровня и сигналов с датчиков, установленных в устройствах, которые перечислены ниже;
3. устройство жесткой логики УЖЛ, представляющее собой систему отдельных жестко связанных ( электрически соединенных ) блоков управляющей аппаратуры. Эта аппаратура служит для автономного управления процессом в случае выхода из строя ЭВМ, а также при необходимости вмешательства обслуживающего персонала в ходе управления процессом.
В ряде случаев эти блоки или часть их участвуют в автоматическом режиме рабо-
ты, если от системы требуется высокое быстродействие.
Выходные сигналы УЖЛ поступают на входы источника питания ИП и силово-
го преобразователя СП;
4. управляемый источник силового питания, в качестве которого может быть уп-
равляемый или неуправляемый выпрямитель.
В отдельных типах тиристорных преобразователей функции ИП и СП совмеща-
ют.
Утолщенными ( жирными ) стрелками на рис. 2.61 отмечено направление потока электроэнергии в двигательном и рекуперативном режимах, светлыми ( тлнкими ) – по
токи информации.
Управляющие сигналы ИП получает от УВУ и УЖЛ, в обратном направлении сле
дует диагностическая и сигнальная информация;
5. силовой преобразователь СП, обычно представляющий управляемый выпря-
митель в установках двойного рода тока или инвертор в преобразователе частоты.
Поток электроэнергии в СП также 2-сторонний (в зависимости от режима рабо
ты двигателя – двигательного или генераторного ).
Управляющие сигналы поступают от УЖЛ и УВУ, а в обратном направлении следует диагностическая и сигнальная информация;
6. электродвигатель ЭД, включающий в себя, кроме двигателя, также датчики
скорости, тока и температуры обмоток;
7. передаточное устройство механизма ПУМ и рабочий орган РО механизма (например, в электроприводе лебедки передаточное устройство – редуктор, рабочий орган – грузовой барабан ).
Рассмотрим процесс прохождения информации в системе управления электро-
приводом.
Основным информационным и управляющим компонентом системы является УВУ, в качестве которого могут применяться микроЭВМ или программируемый конт-
роллер.
На входы УВУ информация поступает от ЭВМ соседнего по иерархии уровня. Связь УВУ с устройствами системы осуществляется с помощью аналоговых, цифровых и импульсных сигналов.
Для этого в состав УВУ вводятся аналого-цифровые, цифроаналоговые, цифро-
импульсные, импульсно-цифровые преобразователи.
Для связи с оператором применяются устройства ввода-вывода: пульт с дисплее
ем или без него, печатающее устройство и т. п.
На УВУ поступает информация с датчиков о ходе процессов и состоянии пара
метров ИП и СП. Эта информация используется для коррекции управляющих сигналов и для контроля работоспособности.
Двигатель, передаточное устройство и рабочий орган также оборудуются датчи-
ками состояния. Информация с них постоянно или по запросу подается на УВУ, где используется в качестве сигналов обратных связей или диагностических сообщений.
Рассмотренная структурная схема микропроцессорной системы управления может
быть использована и в гидравлических электроприводах, например, палубных кранов, по-
степенно вытесняющих тиристорные электроприводы.
Более подробное описание такой МПСУ приведено ниже применительно к электро
гидравлическим палубным кранам типа KL ( производства Федеративной Республики Германия ).
Дата добавления: 2020-02-05; просмотров: 965;
Поиск по сайту
Узнать еще
- B. Департаменты и управления функционального характера.
- F45.38 другие органы или системы
- I. История возникновения и развития классно-урочной системы.
- I. Развитие Донбасса в условиях кризиса феодально-крепостнической системы
- I. Создание системы управленческого учета.
- III. Филогенез эндокринной системы.
- IV. Движение поездов при неисправности электрожезловой системы и порядок регулировки количества жезлов в жезловых аппаратах
- L.3. Состояние российской системы образования и необходимость ее

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
