ОСНОВНІ ВИДИ МЕХАНІЗМІВ
 Механізми з нижчими і вищими кінематичними парами. Плоскі та просторові механізми. Важільні, кулачкові, зубчасті, фрикційні механізми. Механізми з гнучкими зв’язками, варіатори. Механізми з переривчастим рухом вихідної ланки. Гідравлічні та пневматичні механізми.
Механізми з нижчими і вищими кінематичними парами. Плоскі та просторові механізми. Важільні, кулачкові, зубчасті, фрикційні механізми. Механізми з гнучкими зв’язками, варіатори. Механізми з переривчастим рухом вихідної ланки. Гідравлічні та пневматичні механізми.
Плоским називають механізм, рухомі точки якого рухаються в паралельних площинах. Механізм є просторовим, якщо рухомі точки його ланок описують неплоскі траєкторії, або ж траєкторії, які знаходяться в площинах що перетинаються.
 Найбільш поширеними є механізми з нижчими парами – важільні, гвинтові, клинові; з вищими парами – кулачкові, зубчасті, фрикційні, мальтійські, храпові.
Найбільш поширеними є механізми з нижчими парами – важільні, гвинтові, клинові; з вищими парами – кулачкові, зубчасті, фрикційні, мальтійські, храпові.
Наведемо приклади механізмів, що використовуються в різноманітних машинах.
 КРИВОШИПНО-ПОВЗУННИЙ МЕХАНІЗМ (рис. 2.1.) – найбільш поширений, він є основним механізмом в поршневих машинах (двигуни внутрішнього згоряння, компресори, насоси), в ковальських машинах: штампи, преси і т.ін.
КРИВОШИПНО-ПОВЗУННИЙ МЕХАНІЗМ (рис. 2.1.) – найбільш поширений, він є основним механізмом в поршневих машинах (двигуни внутрішнього згоряння, компресори, насоси), в ковальських машинах: штампи, преси і т.ін.
ШАРНІРНИЙ ЧОТИРИЛАНКОВИЙ МЕХАНІЗМ (рис. 2.2) використовується для перетворення одного виду обертального руху в інший і може бути залежно від розмірів ланок: кривошипно-коромисловим, двокривошипним і двокоромисловим. Знаходить застосування в пресах, ковальських машинах, хитних конвейєрах, прокатних станах, муфтах зчеплення, приладах і т. ін.
Шарнірний чотириланковик застосовують і для випадку, коли одна з його точок мусить рухатись по заданій траєкторії. На рис. 2.3. показана схема двокоромислового механізму портального крана зі стрілою 3, точка D якої на робочій частині своєї траєкторіїрухається попрямій DD́ . В наведеній схемі за характером руху ланки 2, 4 – коромисла, 3 – шатун, 1 – стояк.
Подібна задача реалізовується схемою збалансованого маніпулятора, яка показана на рис. 2.4.
Рух точок А, В уздовж вертикальної чи горизонтальної осі задають за допомогою гідравлічних чи пневматичних циліндрів. Механізм містить стояк 0, дві початкові ланки (повзуни 1 , 2) із шарнірами А, і В, до яких приєднаний чотириланковий механізм (шарнірний паралелограм), утворений ланками 3, 4, 5, 6. Такий механізм ще називають «чотириланковий пантограф».
Суттєвою вимогою синтезу схеми маніпулятора є виконання умови, щоб точкаС закріплення пристрою захвату вантажу знаходилась на прямій, яка проходить через точки А, В. За цієї умови рух точки С буде вертикальним при
переміщенні початкової ланки 1 і нерухомій ланці 2. В іншому випадку рух точки С буде горизонтальним, коли рух надається початковій ланці 2 за нерухомої ланки 1. Окрім того необхідно дотриматись правила паралелограма: ED=BF; EB=DF.
 Кулісний механізм (рис. 2.5) виконує перетворення одного виду обертального руху (ланка 1 ) в інший (ланка 3). В іншому випадку (рис.2.8) – безперервного обертального руху (ланка 1) в зворотно-поступальний рух (ланка 5). Такі чотири чи шестиланкові кулісні механізми використовують в стругальних та довбальних верстатах, поршневих насосах і компресорах, гідроприводах, приладах і т. ін. Кулісою як правило, називають ланку 3 з пазом, по якому рухається повзун 2 (кулісний камінь).
Кулісний механізм (рис. 2.5) виконує перетворення одного виду обертального руху (ланка 1 ) в інший (ланка 3). В іншому випадку (рис.2.8) – безперервного обертального руху (ланка 1) в зворотно-поступальний рух (ланка 5). Такі чотири чи шестиланкові кулісні механізми використовують в стругальних та довбальних верстатах, поршневих насосах і компресорах, гідроприводах, приладах і т. ін. Кулісою як правило, називають ланку 3 з пазом, по якому рухається повзун 2 (кулісний камінь).
Кулісою може бути кривошип, шатун, коромисло і навіть повзун.
У гідроприводах широко використовується різновид кулісного механізму, в якому кулісу з каменем замінює циліндр 3 з поршнем 2 (рис. 2.6).
.
1.5. ПРИКЛАДИ ПРОСТОРОВИХ МЕХАНІЗМІВ З НИЖЧИМИ ПАРАМИ
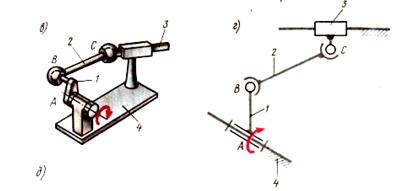
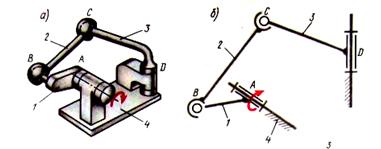
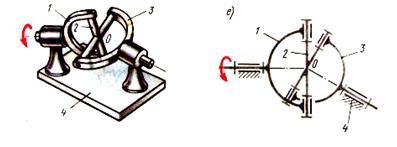
На рис. 2.7 наведені: а, б модель і схема чотириланкового механізму АВСD (ланка 1 – кривошип, 2 – шатун, 3- коромисло, 4 – стояк); в, г – модель і схема АВС кривошипно-повзункового механізму (ланка 1 – кривошип, 2 – шатун, 3- повзун, 4 – стояк); d, e – модель і схема механізму універсального шарніру (шарніру Гука, або карданної передачі), такий механізм служить для передачі обертального руху між валами, осі яких перетинаються, широко використовується в автомобілях, верстатах, приладах.
 |
|
На рис. 2.8 – структурна схема основного важільного механізму промислового робота з незамкненим кінематичним ланцюгом ABCDEF ( ланки 1-5 – рухомі, 6 – стояк, F – схват).
ПРИКЛАДИ ПЛОСКИХ І ПРОСТОРОВИХ МЕХАНІЗМІВ З ВИЩИМИ КІНЕМАТИЧНИМИ ПАРАМИ
 Найбільше поширення мають зубчасті, кулачкові, фрикційні, мальтійські і храпові механізми.
Найбільше поширення мають зубчасті, кулачкові, фрикційні, мальтійські і храпові механізми.
В зубчастих передачах розрізняють зовнішнє (рис 2.9, а ), внутрішнє ( б ), і рейкове зачеплення ( в ): ланка 1- шестерня, 2- колесо, або ж рейка( як окремий випадок).Зубчасті колеса можуть бути з паралельними осями (циліндричні) ( а,б ) , з вісями що перетинаються (конічні) ( г ), і з вісями, що перехрещуються (гіперболоїдні передачі, варіантами яких є: гвинтові ( д ), черв΄ячні ( е ), та гіпоїдні ( ж ) передачі.
Широко використовуються багатоланкові зубчасті передачі: редуктори (рис. 2.10, а ), і планетарні зубчасті механізми (рис. 2.10, б ).
Останнім часом все більш широке застосування знаходять хвильові зубчасті передачі (рис. 2.11) з гнучкими ланками, які надають змогу отримати великі передаточні відношення, високу кінематичну точність і передавати механічний рух через герметичну стінку.
В кулачкових плоских і просторових механізмах, які широко використовуються в різноманітних, верстатах і приладах, вища пара утворена ланками (кулачок - 1 і штовхач - 2), (рис. 2.12).
 Замикання вищої пари може бути силове (наприклад пружиною 5 на рис. 2.12, б), або геометричне (ролик 3 штовхача 2 в пазу кулачка 1 на рис. 2.12, а).
Замикання вищої пари може бути силове (наприклад пружиною 5 на рис. 2.12, б), або геометричне (ролик 3 штовхача 2 в пазу кулачка 1 на рис. 2.12, а).
На рис 2.15, в показана модель просторового кулачкового механізму з обертальним циліндричним кулачком 1 і роликовим штовхачем 2, що рухається поступально.
На рис. 2.13 наведено приклад застосування кулачкового механізму з коромисловим роликовим штовхачем 5 для приводу вихлопного клапана 6, завдяки якому відбувається звільнення циліндра двигуна від продуктів згоряння.
У фрикційному механізмі передача обертального руху здійснюється за допомогою тертя, між ланками 1,2 , що утворюють вищу пару (рис. 2.14, а).
 Фрикційний механізм використовують також у безступінчастих передачах (ВАРІАТОРАХ) (рис. 2.14, б). За постійної кутової швидкості диску 1, переміщення катка 2 вподовж своєї осі маємо можливість плавно змінювати його кутову швидкість і навіть його напрямок обертання.
Фрикційний механізм використовують також у безступінчастих передачах (ВАРІАТОРАХ) (рис. 2.14, б). За постійної кутової швидкості диску 1, переміщення катка 2 вподовж своєї осі маємо можливість плавно змінювати його кутову швидкість і навіть його напрямок обертання.
 Мальтійський механізм (рис. 2.15) перетворює безперервне обертання вхідної ланки- кривошипа 1 в переривчасте (із зупинками) обертання вихідної ланки-хреста 2. Механізм має стояк 3 і вищу пару, що утворена цівкою В кривошипу і пазом хреста.
Мальтійський механізм (рис. 2.15) перетворює безперервне обертання вхідної ланки- кривошипа 1 в переривчасте (із зупинками) обертання вихідної ланки-хреста 2. Механізм має стояк 3 і вищу пару, що утворена цівкою В кривошипу і пазом хреста.
 Храповий механізм з ведучою собачкою і стояком 4 (рис. 2.16) служить для перетворення зворотно-обертального руху коромисла 1 із собачкою 2 в переривчасто-обертальний рух (в одному напрямку) храпового колеса 3. Собачка 5 з пружиною 6 не дає колесу можливості обертатись в зворотному напрямку. Вища пара тут утворена собачкою і храповим колесом.
Храповий механізм з ведучою собачкою і стояком 4 (рис. 2.16) служить для перетворення зворотно-обертального руху коромисла 1 із собачкою 2 в переривчасто-обертальний рух (в одному напрямку) храпового колеса 3. Собачка 5 з пружиною 6 не дає колесу можливості обертатись в зворотному напрямку. Вища пара тут утворена собачкою і храповим колесом.
Мальтійські і храпові механізми широко застосовуються у верстатах і приладах.
Опис значно більшої кількості різноманітних механізмів наведено у спеціальних довідниках (Артоболевский И.И. Механизмы в современной технике.– в 7 т. М.: Наука,1979-1981; Кожевников С.Н., Есипенко Я.И., Раскин Я.М. Механизмы: Справочник.–М.: Машиностроение, 1976. –784 с.)
2.2. КІНЕМАТИЧНІ ЛАНЦЮГИ. Кінематичним ланцюгом називається система ланок, пов'язаних між собою кінематичними парами.
Приклад:
 |
Такий кінематичний ланцюг складається з чотирьох ланок, пов'язаних трьома кінематичними парами. Ланки 1,2 входять в обертальну пару А. Ланки 2,3 входять у поступальну пару В. ланки 3,4 входять в обертальну пару С.
Кінематичні ланцюги поділяються на ПРОСТІ і СКЛАДНІ. Простим кінематичним ланцюгом називають такий ланцюг, у якого кожна ланка входить не більш ніж у дві КП. Складним кінематичним ланцюгом називають ланцюг, у якому є хоча б одна ланка, що входить більш ніж у дві КП.
Прості і складні кінематичні ланцюги у свою чергу поділяються на замкнені і розімкнені.
 |
ЗАМКНЕНИМ кінематичним ланцюгом називають такий ланцюг,
ланки якого утворять один, чи кілька замкнених рухомих контурів.
РОЗІМКНЕНИМ кінематичним ланцюгом називають кінематичний ланцюг, ланки якого не утворюють замкнених рухомих контурів.
2.2.2.НАЗВИ ЛАНОК ЗАЛЕЖНО ВІД КОНСТРУКТИВНИХ ОЗНАК ТА ХАРАКТЕРУ РУХУ
Ланки розрізняють за конструктивними ознаками (колінчастий вал, шатун, поршень, зубчасте колесо тощо), за характером руху (кривошип, коромисло, повзун, куліса і т.д.).
КРИВОШИП - ланка, що повертається на 360˚ навколо нерухомої осі.
КОРОМИСЛО - ланка, що здійснює обертальний неповноповоротний рух.
ШАТУН - ланка, що здійснює складний (плоскопаралельний, плоский) рух.
ПОВЗУН - ланка, яка рухається поступально.
КУЛІСА - рухома напрямна (може бути кривошипом, коромислом, шатуном).
КУЛІСНИЙ КАМІНЬ - повзун, що рухається вздовж куліси.
 Розглянемо приклади схем механізмів і визначимо назви ланок, що відповідають їх характеру руху: Для кривошипно-повзунного механізму (рис.2.22); 1 - кривошип, 2 - шатун, 3 - повзун, 0 - стояк.
Розглянемо приклади схем механізмів і визначимо назви ланок, що відповідають їх характеру руху: Для кривошипно-повзунного механізму (рис.2.22); 1 - кривошип, 2 - шатун, 3 - повзун, 0 - стояк.
Механізм можна розглядати як окремий випадок кінематичного ланцюга (КЛ). МЕХАНІЗМОМ називають такий КЛ у якому за заданого руху одної чи декількох ланок відносно кожної з них, всі інші ланки відтворюють однозначно зумовлені рухи.
Ланки механізму, яким надають рух ззовні, називають ВХІДНИМИ.
Ланка (ланки) механізму які здійснюють необхідний рух, для якого призначений механізм, називають ВИХІДНИМИ.
Розрізняють також ВЕДУЧУ і ВЕДЕНУ ланки.
ВЕДУЧОЮ ланкою називають ланку, для якої напрямок прикладеної зовнішньої сили збігається з напрямком руху (робота зовнішніх сил - величина позитивна).
ВЕДЕНОЮ ланкою називають ланку для якої робота прикладених зовнішніх сил - величина негативна.
У більшості випадків вхідна ланка є і ведучою, але може бути і навпаки. Ведучою називають таку ланку, для якої елементарна робота зовнішніх сил, що прикладаються до неї, додатна. Веденою називають ланку, для якої елементарна робота зовнішніх сил, що прикладені до неї, від'ємна. Тому вхідна ланка у деяких механізмах може бути як ведучою, так і веденою. Наприклад, у механізмі кривошипно-поршневого двигуна, колінчастий вал і поршень залежно від співвідношення сил, які діють на ланки механізму, можуть бути або ведучими, або веденими.
2.2.3.КІНЕМАТИЧНА СХЕМА МЕХАНІЗМУ
Щоб вивчити рух механізму, недостатньо знати його СТРУКТУРУ, тобто число ланок, число і клас кінематичних пар. Необхідно також знати розміри окремих ланок, їхнє взаємне розташування, для цього складають КІНЕМАТИЧНУ СХЕМУ МЕХАНІЗМУ (КСМ).
КСМ будується в масштабі з точним дотриманням усіх розмірів. Для цього вТММвикористовують масштабний коефіцієнт довжин, розмірність якого - м/мм, тобто під масштабом довжини розуміють відношення значення довжини ланки в метрах до числового значення зображуваного на плані відрізка в мм.
Наприклад,


де [l  ] = м ; [ ] = мм.
] = м ; [ ] = мм.
Для визначення числового значення відрізків розміри відповідних ланок необхідно розділити на обраний масштабний коефіцієнт плану

Класифікація багатоланкового механізму дещо спрощується, якщо механізм показати у вигляді СТРУКТУРНОЇ СХЕМИ, яка побудована за його натурним зразком чи кінематичною схемою. Спрощена структурна схема, запропонована Кореняко О.С., наочно вказує на послідовність з’єднань в КП. Схему виконують без дотримання масштабу. Ланки показують у вигляді багатокутників, число вершин яких відповідає числу елементів КП на них, а всі пари є обертальними. Поступальні КП замінюють обертальними за умови збільшення довжини відповідної ланки до нескінченності.
 За таких умов спрощена структурна схема механізму (рис. 2.25) матиме вигляд, що представлений на рис. 2.26.
За таких умов спрощена структурна схема механізму (рис. 2.25) матиме вигляд, що представлений на рис. 2.26.
1 – кривошип, 2 – шатун, 3- куліса, 4- кулісний камінь, 5- коромисло
| <== предыдущая лекция | | | следующая лекция ==> |
| РОЗРАХУНОК ГЕОМЕТРИЧНИХ ПАРАМЕТРІВ ЦИЛІНДРИЧНИХ ПРЯМОЗУБИХ ЗУБЧАСТИХ КОЛІС З УМОВИ ВЕРСТАТНОГО ЗАЧЕПЛЕННЯ | | | Рух механізму відносно водила |
Дата добавления: 2016-06-15; просмотров: 9696;
Поиск по сайту
Узнать еще
- Інтервальні оцінки: основні ідеї
- Інфляція, її види і вимір
- Інфляція: суть, види та наслідки.
- Інформація та документація. Керування документаційними процесами. Частина 1. Основні положення.
- Авіаційна травма та її види. Особливості судово-медичної експертизи та її значення для встановлення причини авіаційної пригоди.
- Адміністративно-командна система та її основні риси.
- АНАЛІЗ І ПРОЕКТУВАННЯ КУЛАЧКОВИХ МЕХАНІЗМІВ
- Аналітичне дослідження кінематики плоских важільних механізмів методом замкнутих векторних контурів

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
