Синтез механізмів за заданими законами руху ланок
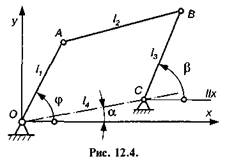
Розв'язання задачі про відтворення заданого руху ланок покажемо на прикладі шарнірного чотириланкового механізму (рис. 12.4). Нехай закон руху вхідної ланки ОА задано у вигляді залежності його кута повороту ц від часу t, тобто
Ц = Ф(0, (12.5)
а закон руху вихідної ланки ВС — у вигляді залежності його кута повороту в також від часу t, тобто
в = в(0· (12.6)
Вилучаючи з рівнянь (12.5) і (12.6) час, записуємо функцію положення
в = в(ц). (12.7)
Закон руху вихідної ланки можна задати також у вигляді передаточної функції /31 — аналога кутової швидкості <р'3 (див. параграфи 3.6—3.8):

де (оь щ3 — кутова швидкість ланки відповідно 7 і 3.
За цією причиною механізми, які дають змогу відтворити задану функціональну залежність (12.7) або (12.7') між переміщеннями ланок, що утворюють кінематичні пари зі стояком, називають передаточними.
Зв'язок між кутами ц і в встановлюємо за допомогою розмірів ланок механізму, які
називають параметрами кінематичної схеми механізму або скорочено параметрами синтезу. Отже, щоб задовольнити умову (12.7), необхідно відповідним чином підібрати параметри механізму. Для механізму, зображеного на рис. 12.4, кількість незалежних параметрів може дорівнювати шести. Це довжини
ланок  початкове значення ц0 кута ц і кут а, який утворює стояк ОС з віссю Ох. Якщо прийняти довжину /! кривошипа ОА за одиницю вимірювання довжин ланок і виразити розміри ланок через відносні параметри:
початкове значення ц0 кута ц і кут а, який утворює стояк ОС з віссю Ох. Якщо прийняти довжину /! кривошипа ОА за одиницю вимірювання довжин ланок і виразити розміри ланок через відносні параметри:

то отримаємо п'ять параметрів синтезу (л2, л3, л4, ц0 і ос), які необхідно визначити.
Маючи заданими закони руху ланок ОА і ВС, можна визначити окремі положення цих ланок. Позначимо кути, які утворюють ланки ОА і ВС з віссю Ох (рис. 12.4), відповідно ц,, <с2, <р?, ..., срт і Рь Р2, Рз, ..., Р„. Тоді згідно з (12.7) матимемо систему рівнянь:

Якщо число рівнянь (12.8) дорівнює числу параметрів, які треба визначити, то задачу теоретично можна повністю розв'язати. У практичних задачах внаслідок ускладнень при спільному розв'язанні рівнянь (12.8) число т пар заданих відповідних значень кутів ц і в вибирають таким, що дорівнює числу параметрів, які необхідно визначити. У такій постановці задача про відтворення заданого закону руху називається задачею про положення і розглядається далі.
Дата добавления: 2016-06-15; просмотров: 1642;
Поиск по сайту
Узнать еще
- III. Биосинтез крахмала и гликогена.
- Iii. строение, биосинтез и биологическое действие гормонов
- Активация аминокислот при биосинтезе белка.
- Анаболизм прокариот. Биосинтез углеводов
- АНАЛІЗ І ПРОЕКТУВАННЯ КУЛАЧКОВИХ МЕХАНІЗМІВ
- Аналіз руху та ефективності формування грошових потоків
- Аналітичне дослідження кінематики плоских важільних механізмів методом замкнутих векторних контурів
- Анализ и синтез систем автоматического управления электроприводами

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
