Системы с суммирующим усилителем
В системах с суммирующим усилителем стабилизация скорости ЭП или момента обеспечивается за счет использования непрерывных и задержанных ОС. В приводах постоянного тока применяются три основные жесткие ОС:
1) по скорости;
2) по напряжению питания ЭД;
3) по току ЭД.
На практике чаще встречаются системы стабилизации скорости. В них используют ООС по скорости, ООС по напряжению и ПОС по току. В системах стабилизации момента, наоборот, используют ПОС по скорости и напряжению и ООС по моменту [4, 9].
Изобразим функциональную схему ЭП с суммирующим усилителем и тремя основными ОС (рис 2.4).
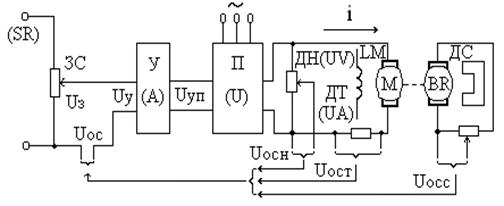
Рис.2.4. Функциональная схема электропривода с суммирующим усилителем
На схеме (рис 2.4):
ЗС (SR) – задатчик скорости
У (A) – суммирующий усилитель
П (U) – преобразователь
М – двигатель
ДС (BR) – датчик скорости
ДН (UV) – датчик напряжения
ДТ (UA) – датчик тока.
Работа ЭП в установившихся и переходных режимах при инерционном преобразователе и постоянном магнитном потоке ЭД описывается системой уравнений (2.1):
 (2.1)
(2.1)
Здесь  - напряжения задания, ОС, управления и управления преобразователем;
- напряжения задания, ОС, управления и управления преобразователем;
 - коэффициенты усиления (промежуточного) суммирующего усилителя и преобразователя;
- коэффициенты усиления (промежуточного) суммирующего усилителя и преобразователя;
 - ЭДС преобразователя;
- ЭДС преобразователя;
 - угловая скорость ЭД;
- угловая скорость ЭД;
 - момент и ток ЭД и момент и ток статической нагрузки;
- момент и ток ЭД и момент и ток статической нагрузки;
 - коэффициент передачи ЭД по скорости;
- коэффициент передачи ЭД по скорости;
 - коэффициент ЭД по моменту;
- коэффициент ЭД по моменту;
 - постоянная времени преобразователя;
- постоянная времени преобразователя;
 - суммарные сопротивление и индуктивность силовой якорной цепи УП-Д, включающие
- суммарные сопротивление и индуктивность силовой якорной цепи УП-Д, включающие  и сопротивления и индуктивности других элементов якорной цепи;
и сопротивления и индуктивности других элементов якорной цепи;
 - момент инерции ЭП с учетом момента инерции ЭД и приведенного к валу ЭД момента инерции механизма
- момент инерции ЭП с учетом момента инерции ЭД и приведенного к валу ЭД момента инерции механизма  ;
;
 - коэффициенты передачи ОС.
- коэффициенты передачи ОС.
Датчики ОС обычно полагают безынерционными. В качестве датчиков ОС в системах ЭП используют тахогенераторы, делители напряжения, шунты или трансформаторы тока.
Решая систему уравнений, для замкнутой системы ЭП, мы получим дифференциальное уравнение, описывающее всю систему в целом. В общем виде его можно представить так:

Обычно это уравнение записывают при одновременном действии всех ОС. В справочниках по автоматизированному ЭП приводятся коэффициенты этого уравнения для различных их сочетаний.
Из общего уравнения легко получить частное, оставив только коэффициенты, действующих в данном приводе ОС.
При расчете динамики используют структурную схему привода, которую можно составить по функциональной схеме при действии всех основных ОС (рис.2.5):
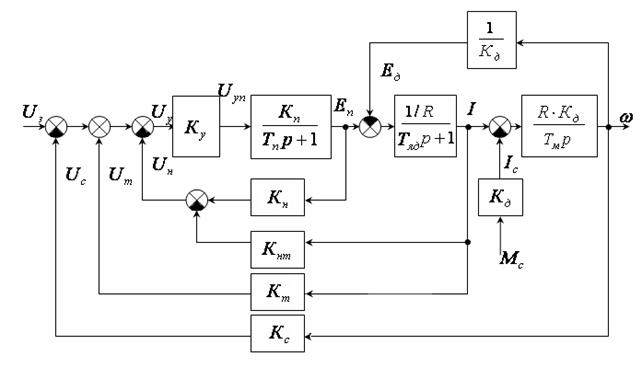
Рис.2.5.Структурная схема электропривода
На схеме показаны:
ОС по напряжению на двигателе, полученная как сочетание ОС по ЭДС преобразователя и ОС, учитывающей падение напряжения на внутреннем сопротивлении преобразователя;
ОС по току якоря;
ОС по скорости.
 - передаточный коэффициент ОС по напряжению, токовая составляющая;
- передаточный коэффициент ОС по напряжению, токовая составляющая;
 - сопротивление силовой цепи преобразователя.
- сопротивление силовой цепи преобразователя.
Дифференциальное уравнение, описывающее систему ЭП, чаще всего находят из анализа структурной схемы, определив ПФ всей системы. Дифференциальное уравнение и ПФ системы при действии любой отдельно взятой ОС можно получить, если оставить на структурной схеме только эту ОС.
На практике для определения ПФ системы используют свернутую структурную схему (рис.2.6), в которой возмущающее воздействие перенесено на вход системы, а токовая ОС на выход.
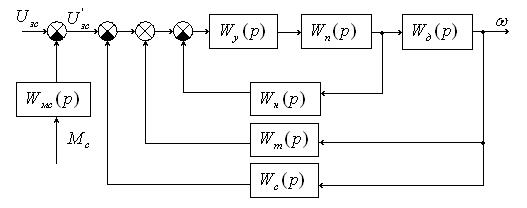
Рис.2.6.Свернутая структурная схема электропривода
На схеме (рис. 2.6) общее воздействие на ЭП:
 ,
,
где  - управляющее воздействие;
- управляющее воздействие;
 - возмущающее воздействие;
- возмущающее воздействие;
 - передаточная функция звена, приводящего возмущающее воздействие к входу системы.
- передаточная функция звена, приводящего возмущающее воздействие к входу системы.
при действии трех основных ОС можно определить так:
 ,
,
где  ;
;
- постоянная времени преобразователя;
 - постоянная времени якорной цепи;
- постоянная времени якорной цепи;
 - постоянная времени якоря ЭД.
- постоянная времени якоря ЭД.
В этой схеме уравнениями (2.1) с учетом переноса точек воздействия определяются ПФ:
 - усилителя;
- усилителя;
 - преобразователя;
- преобразователя;
 - ЭД;
- ЭД;
 - ОС по напряжению;
- ОС по напряжению;
 - ОС по току;
- ОС по току;
 - ОС по скорости.
- ОС по скорости.
Общую передаточную функцию системы записывают по отношению к суммарному воздействию системы:
 В этом выражении:
В этом выражении:
 .
.
Передаточная функция системы с любой ОС может быть записана в виде:
 . (2.4)
. (2.4)
Передаточные функции системы с суммирующим усилителем для случая действия различных ОС приводятся в справочниках по электроприводу.
Дата добавления: 2016-06-15; просмотров: 3202;
Поиск по сайту
Узнать еще
- Cимпатическая нервная система. Центральный и периферический отдел симпатической нервной системы.
- I.2. Антигены системы АВ0. Генетика. Структура
- I.2.1 ПЕРВЫЙ ЗАКОН НЬЮТОНА. ИНЕРЦИАЛЬНЫЕ СИСТЕМЫ ОТСЧЁТА.
- I.2.1 ПОЛНАЯ И ВНУТРЕННЯЯ ЭНЕРГИЯ СИСТЕМЫ. ТЕПЛОТА И РАБОТА
- I.3. Антитела системы АВ0
- I.5.4 НЕИНЕРЦИАЛЬНЫЕ СИСТЕМЫ ОТСЧЁТА. СИЛЫ ИНЕРЦИИ
- II. ЭЛЕКТРИЧЕСКИЙ ДИПОЛЬ. ДИПОЛЬНЫЙ МОМЕНТ СИСТЕМЫ ЭЛЕКТРИЧЕСКИХ ЗАРЯДОВ
- III. Избирательные системы.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
