Соединение обмоток U/D: а – схема, б – векторная диаграмма.
ЕАВЕав=330/30 , соединение U/D - 11

Соединение обмоток U/U:
а-схема, б – векторная диаграмма
ЕАВЕав= 360/30
Соединение U/U-12
Соединение D/D - 0
В трансформаторах указывается группа соединений. Группа соединений определяется сдвигом фаз между линейными напряжениями первичной и вторичной обмоток.
Расчет трехфазного трансформатора производится для 1 фазы. В трехфазном схема замещения для 1 фазы.
PКН®RК=PКН/3I1Н2 r0=P0/3I02 S=Ö3 U1НI1Н=Ö3 U2НI2Н
Асинхронный двигатель. Устройство, принцип действия.
Неподвижная часть – статор. Статор состоит из чугунного или стального корпуса, внутри которого помещен цилиндр, набирается из штампованных листов электротехнической стали и имеет пазы. Вращающаяся часть называется ротором, имеет сердечник с пазами.
1.Фазный ротор, когда в пазы укладывается трехфазная обмотка, соединенная по схеме U. Концы обмотки выводятся на кольца, расположенные на валу двигателя и эти кольца через щетки соединяются с трехфазным реостатом.
|
Фазный ротор с контактными кольцами и реостатом. Ротор с коротко замкнутой обмоткой.
|
2.Асинхронный двигатель с короткозамкнутым ротором. Когда в пазы вставляют стержни с обмотками или пазы заливают алюминием и с торца коротко замыкаются. Ротор в виде " беличьей клетки ".
На обмотки подается трехфазное напряжение. Возникает вращательное магнитное поле, возникает магнитное поле. Это магнитное поле возникает в обмотках.
Мвр.=кФIР , где Мвр.- вращающий момент, к=const
n1=60f/p , где n1- скорость вращения магнитного поля статора,
p- число пар полюсов
f – частота тока , f=50 Гц
3 обмотки- p=1 n1=3000 об/мин
6 обмоток p=2 n1=1500 об/мин
9 обмоток p=3 n1=1000 об/мин
n2 – скорость вращения ротора (двигателя), n2 < n1
Скольжение – это относительное отставание скорости вращения ротора от скорости вращения магнитного поля статора.
S=(n1-n2)/n1 , где S – скольжение S=1¸0 или от 100% до 0% n2=n1(1-S)
S пуск=1 SН=2¸6 %
Ток в обмотках ротора создает вращательное магнитное поле. Скорость вращения магнитного поля ротора совпадает со скоростью вращения магнитного поля статора.
f2- частота тока, f2=Sf1-частота тока в статоре.
Вращающий момент и механическая характеристика асинхронного двигателя.
Схема замещения АД.
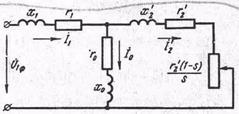
Полная схема замещения асинхронного двигателя.
Мвр.=PМЕХ./W2 ,
где PМЕХ. – механическая мощность двигателя,
W2- угловая скорость вращения ротора
W2=W1 (1-S)
W1-угловая скорость вращения магнитного потока
Pмех.=3I2/2r2/(1-S)/S 
Графики М (S) и I/2 (S). Механическая характеристика асинхронного двигателя.
Мвр.~ 
n=f(M) Мпуск=  , Sкр =
, Sкр =  , Мкр =
, Мкр =  .
.
Sн=2-6% , М пуск»(1,8-2,2)Мн.
Регулирование скорости вращения асинхронного двигателя.
n2=n1(1-S)=  - скорость двигателя.
- скорость двигателя.
Для регулирования скорости вращения асинхронных двигателей применяют следующие способы:
1.Изменение скольжения. Его меняют путем введения сопротивления в цепь фазного ротора.

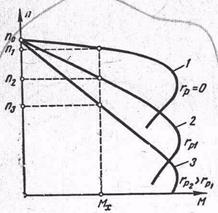
Влияние сопротивления в цепи ротора Регулирование скорости вращения
на вид механической характеристики. асинхронного двигателя реостатом в цепи
ротора.
rg//> rg/
n//<n/
Этот способ регулирования используется для регулирования с фазным ротором.
Достоинства: плавность регулирования.
Недостатки: введение сопротивления ведет к увеличению потерь, КПД падает.
2.Изменение числа пар полюсов:
Числа пар полюсов меняют число пар обмоток или путем перемещения с одинарной звезды на двойную.
Чем больше пар полюсов, тем больше скорость меняется кратно, скорость меняется вниз.
3.Регулирование скорости изменением частоты:
Частоту меняют путем установки на входе преобразователя частоты.
f// > f/
n//< n/
Дата добавления: 2016-06-09; просмотров: 2375;
Поиск по сайту
Узнать еще
- A, B, С - начала обмоток
- II. Соединение трёхфазной нагрузки звездой без нейтрального провода (симметричная нагрузка).
- III. Расчёт электрического состояния цепи с последовательным соединением элементов L, R, C.
- III. Схема замещения и векторная диаграмма асинхронного двигателя
- IV. Расчёт цепи с параллельным соединением R, L, C элементов
- RLC-контур с параллельным соединением элементов в цепи переменного тока.
- А — наложение первого ряда мышечно-мышечных швов; б — наложение второго ряда мышечно-мышечных швов; в — соединение краев пузырно-маточной складки брюшины (перитонизация).
- Анаэробный гликолиз: понятие, этапы, общая схема, последовательность реакций, регуляция, энергетический баланс. Регуляция гликолиза

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
