Геометро-кинематические характеристики ПР
Формула строения – математическая запись структурной схемы манипулятора, содержащая информацию о числе его подвижностей, виде кинематических пар и их ориентации относительно осей базовой системы координат (системы, связанной с неподвижным звеном).
Движения, которые обеспечиваются манипулятором, делятся:
· на глобальные (для роботов с подвижным основанием) – движения стойки манипулятора, которые существенно превышают размеры механизма;
· региональные (транспортные) – движения, обеспечиваемые первыми тремя звеньями манипулятора или его "рукой", величина которых сопоставима с размерами механизма;
· локальные (ориентирующие) – движения, обеспечиваемые звеньями манипулятора, которые образуют его "кисть", величина которых значительно меньше размеров механизма.
В соответствии с этой классификацией движений в манипуляторе можно выделить два участка кинематической цепи с различными функциями: механизм руки и механизм кисти. Под "рукой" понимают ту часть манипулятора, которая обеспечивает перемещение центра схвата – точки М (региональные движения схвата); под "кистью" – те звенья и пары, которые обеспечивают ориентацию схвата (локальные движения схвата).
 Рассмотрим структурную схему антропоморфного манипулятора, то есть схему, которая в первом приближении соответствует механизму руки человека (рис. 1.8).
Рассмотрим структурную схему антропоморфного манипулятора, то есть схему, которая в первом приближении соответствует механизму руки человека (рис. 1.8).
Этот механизм состоит из трех подвижных звеньев и трех кинематических пар: двух трехподвижных сферических А3сф и С3сф и одной одноподвижной вращательной В1в.
Кинематические пары манипулятора характеризуются: именем или обозначением КП – заглавная буква латинского алфавита (A, B, C и т. д.); звеньями, которые образуют пару (0/1, 1/2 и т. п.); относительным движением звеньев в паре (для одноподвижных пар – вращательное, поступательное и винтовое); подвижностью КП (для низших пар от 1 до 3, для высших пар от 4 до 5); осью ориентации оси КП относительно осей базовой или локальной системы координат.
Рабочее пространство манипулятора – часть пространства, ограниченная поверхностями, огибающими к множеству возможных положений его звеньев.
Зона обслуживания манипулятора – часть пространства, соответствующая множеству возможных положений центра схвата манипулятора. Зона обслуживания является важной характеристикой манипулятора. Она определяется структурой и системой координат руки манипулятора, а также конструктивными ограничениями, наложенными на относительные перемещения звеньев в КП.
Подвижность манипулятора W – число независимых обобщенных координат, однозначно определяющее положение схвата в пространстве.
Для незамкнутых кинематических цепей
Маневренность манипулятора М – подвижность манипулятора при зафиксированном (неподвижном) схвате.
M = W – 6.
Возможность изменения ориентации схвата при размещении его центра в заданной точке зоны обслуживания характеризуется углом сервиса – телесным углом y, который может описать последнее звено манипулятора (звено, на котором закреплен схват) при фиксации центра схвата в заданной точке зоны обслуживания.
 .
.
Относительная величина ky = y /(4p) называется коэффициентом сервиса.
При структурном синтезе механизма манипулятора необходимо учитывать следующее:
· кинематические пары манипуляторов снабжаются приводами, включающими двигатели и тормозные устройства, поэтому в схемах манипуляторов обычно используются одноподвижные кинематические пары – вращательные или поступательные;
· необходимо обеспечить не только заданную подвижность схвата манипулятора, но и такую ориентацию осей кинематических пар, которая бы обеспечивала необходимую форму зоны обслуживания, а также простоту и удобство программирования его движений;
· при выборе ориентации кинематических пар необходимо учитывать расположение приводов (на основании или на подвижных звеньях), а также способ уравновешивания сил веса звеньев.
В математике положение точки в пространстве задается в одной из трех систем координат:
· прямоугольной декартовой с координатами xM, yM, zM;
· цилиндрической с координатами rsM, j M, zM;
· сферической с координатами rM, jM, φM.
Соответственно для позиционирования объекта в пространстве конструкция манипулятора будет соответствовать одной из нижеприведенных схем (рис. 1.9) или их комбинации.
|
|
|
|
Рис. 1.9. Системы координат "руки" манипулятора: а) – прямоугольная (декартова), б) – цилиндрическая, в) сферическая , г) угловая (ангулярная)
Если движение пальцев руки учитывать только в одном слитом движении охватывания, то рука человека имеет 12 степеней подвижности. В манипуляторах хорошее воспроизведение свойств руки человека достигается при степени подвижности манипулятора, равном семи, и при условии, что оконечное звено манипулятора, осуществляющее взятие предмета (схват), имеет возможность полнооборотного вращения.
Структура манипулятора определяется и местом размещения приводов. Если приводы размещаются непосредственно в кинематических парах, то к массам подвижных звеньев манипулятора добавляются массы приводов. Суммарная нагрузка на приводы и их мощность увеличиваются, а отношение массы манипулятора к полезной нагрузке (максимальной массе объекта манипулирования) уменьшается.
Поэтому при проектировании роботов приводы звеньев руки, как наиболее мощные и обладающие большей массой, стремятся разместить ближе к основанию робота. Для передачи движения от привода к звену используются дополнительные кинематические цепи. Рассмотрим схему руки манипулятора ПР фирмы ASEA (рис. 1.10). К трехзвенному механизму с ангулярной системой координат добавлены:
· для привода звена 2 – простейший кулисный механизм, образованный звеньями 4, 5 и 2;
· для привода звена 3 – цепь, состоящая из кулисного механизма (звенья 6,7 и 8) и шарнирного четырехзвенника (звенья 8, 9, 2 и 3).
Таким образом, в рычажном механизме можно выделить кинематическую цепь руки (звенья 1, 2 и 3) и кинематические цепи приводов. Манипуляторы, использующие принцип размещения приводов на основании, имеют более сложные механизмы. Однако увеличение числа звеньев и кинематических пар компенсируется уменьшением масс и моментов инерции, подвижных звеньев манипулятора. Кроме того, замкнутые кинематические цепи повышают точность и жесткость механизма. В целом, манипуляторы, использующие принципы комбинированного размещения приводов (часть приводов на основании, часть на подвижных звеньях), обладают лучшими энергетическими и динамическими характеристиками, а также более высокой точностью.
В кинематических схемах рассмотренных манипуляторов веса звеньев вызывают дополнительную нагрузку на приводы. Фирма SKILAM разработала робот SANCIO (рис. 1.11), в котором веса приводов и звеньев воспринимаются кинематическими парами, а на момент двигателей влияют только через силы трения. Такая структурная схема механизма потребовала увеличения размеров кинематических пар, однако, в целом, был получен существенный выигрыш по энергетическим и динамическим показателям.
| Рис. 1.10. Робот ASEA | Рис. 1.11. Робот типа SCARA |
Данные примеры не охватывают всех возможных ситуаций рационального выбора структуры манипуляторов. Они только демонстрируют наиболее известные из удачных структурных схем.
Важная особенность манипуляторов – изменение структуры механизма в процессе работы. В соответствии с циклограммой, или программой работы, робота в некоторых кинематических парах включаются тормозные устройства. При этом два звена механизма жестко соединяются с друг другом, образуя одно звено. Из структурной схемы механизма исключаются одна кинематическая пара и одно звено, число подвижностей схвата механизма уменьшается (обычно на единицу). Изменяется структура механизма и в тех случаях, когда в процессе выполнения рабочих операций (например, при сборке или сварке) схват с объектом манипулирования соприкасается с окружающими предметами, образуя с ними кинематические пары. Кинематическая цепь механизма замыкается, а число подвижностей уменьшается. В этом случае в цепи могут возникать избыточные связи. Эти структурные особенности манипуляторов необходимо учитывать при программировании работы промышленного робота.
Вид движения руки манипулятора определяет размеры зоны, которая при выполнении основного рабочего движения должна оставаться свободной, т. е. препятствия в этой зоне должны отсутствовать. При обслуживании технологического оборудования с узкой рабочей зоной (например, прессов, нагревательных печей и пр.) предпочтительные схемы с одной поступательной степенью подвижности – с выдвижной рукой (рис. 1.12, а), поскольку при движении руки с поворотами (рис. 1.12, б) свободной должна оставаться гораздо более широкая зона.
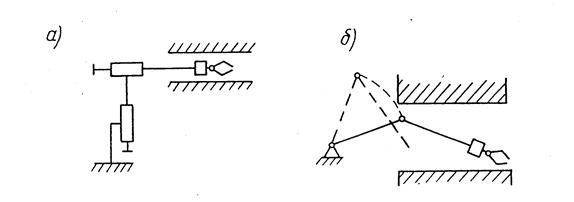
Рис. 1.12. Обслуживание технологического оборудования с узкой рабочей зоной
Дата добавления: 2022-02-05; просмотров: 708;
Поиск по сайту
Узнать еще
- II. Основные характеристики микроскопа.
- III. Биогеохимические циклы элементов и веществ (на примере основных биогенных элементов: углерод, азот, фосфор) и их количественные характеристики.
- III. Характеристики основных классов загрязняющих веществ в водной среде.
- SWOT- анализ: характеристики при оценке сильных, слабых сторон компании, ее возможностей и угроз
- XXVII. ОБЩИЕ ХАРАКТЕРИСТИКИ ГРИБОВ
- А.2 Виды адсорбентов и их характеристики
- Активная мощность и угловые характеристики генератора
- Акустические характеристики устной речи

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
