Тахогенераторы постоянного тока
Тахогенераторы постоянного тока по конструкции и принципу действия представляют собой электрическую машину постоянного тока всегда с независимым возбуждением, чаше всего от постоянных магнитов (рис. 4.10).
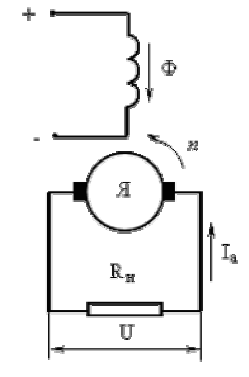
Рис. 4.10. Тахогенератор постоянного тока
Если учесть падение напряжения в щеточном контакте  , уменьшение магнитного потока возбуждения
, уменьшение магнитного потока возбуждения  из–за размагничивающего действия поперечной реакции якоря на величину
из–за размагничивающего действия поперечной реакции якоря на величину  , уравнение напряжение тахогенератора будет
, уравнение напряжение тахогенератора будет
 (4.3)
(4.3)
где  – ток якоря;
– ток якоря;  – сопротивление обмотки якоря.
– сопротивление обмотки якоря.
Поскольку  , а DФ можно принять равным
, а DФ можно принять равным  , уравнение (4.3) принимает вид
, уравнение (4.3) принимает вид

Здесь:  – сопротивление нагрузки;
– сопротивление нагрузки;  – коэффициент пропорциональности между током якоря и потоком реакции якоря.
– коэффициент пропорциональности между током якоря и потоком реакции якоря.
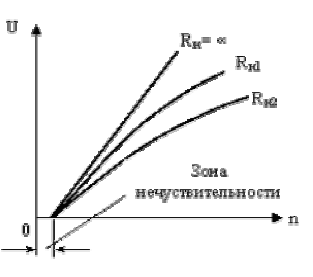
Рис. 4.11. Выходные характеристики тахогенератора постоянного тока
Решая последнее уравнение относительно U, окончательно получим
 (4.4)
(4.4)
На рис. 4.11 по уравнению (4.4) построены выходные характеристики тахогенератора постоянного тока. Их анализ позволяет сделать следующие выводы:
1) характеристики начинаются не из нуля – появляется зона нечувствительности, в пределах которой выходное напряжение равно нулю;
2) характеристики нелинейные с различной крутизной: чем меньше сопротивление нагрузки, тем меньше крутизна.
Погрешности тахогенератора. Зона нечувствительности обуславливается падением напряжения в переходном контакте между щеткой и коллектором. Для ее уменьшения применяют щетки с малым переходным сопротивлением (медно–графитовые или серебряно– графитовые), а в прецизионных тахогенераторах используют проволочные щетки с серебряным, золотым и даже платиновым покрытием. Влияние реакции якоря проявляется в нелинейности выходной характеристики. С целью ее ослабления магнитную цепь тахогенератора выполняют либо слабо, либо сильно насыщенной. И в том и в другом случае рабочая точка лежит на линейной части характеристики, где размагничивающее действие поперечной реакции якоря сказывается незначительно.
Температурная погрешность связана с изменением сопротивления обмотки якоря и особенно обмотки возбуждения, если последняя имеется. (При увеличении температуры меди на  ее сопротивление увеличивается на 20%). При увеличении сопротивления обмотки возбуждения уменьшается ток, магнитный поток и выходное напряжение тахогенератора. Температурную погрешность можно уменьшить различными путями. Например, включением последовательно с обмоткой возбуждения терморезистора, стабилизирующего сопротивление всей цепи. Достаточно эффективный способ – сильное насыщение магнитной цепи. В этом случае даже значительные колебания тока возбуждения весьма слабо отражаются на колебаниях магнитного потока возбуждения (рис. 4.12).
ее сопротивление увеличивается на 20%). При увеличении сопротивления обмотки возбуждения уменьшается ток, магнитный поток и выходное напряжение тахогенератора. Температурную погрешность можно уменьшить различными путями. Например, включением последовательно с обмоткой возбуждения терморезистора, стабилизирующего сопротивление всей цепи. Достаточно эффективный способ – сильное насыщение магнитной цепи. В этом случае даже значительные колебания тока возбуждения весьма слабо отражаются на колебаниях магнитного потока возбуждения (рис. 4.12).
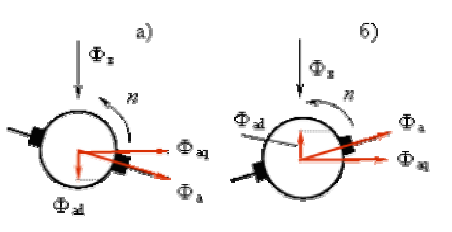
Рис. 4.13. Причины асимметрии выходного напряжения
В тахогенераторах с постоянными магнитами подобной проблемы практически не существует, а изменение сопротивления обмотки якоря приводит к очень небольшим погрешностям.
Асимметрия выходного напряжения здесь возникает из–за смещения щеток с геометрической нейтрали. Как известно, при сдвиге щеток с нейтрали, возникает продольная реакция якоря, которая носит намагничивающий характер при одном направлении вращения (рис. 4.13, а) и размагничивающий при другом (рис. 4.13, б). Для устранения этой погрешности надо очень точно устанавливать и надежно закреплять щеточный узел, не допускать люфтов в щеткодержателях.
Пульсация выходного напряжения является специфической погрешностью тахогенератора постоянного тока. Различают зубцовые, якорные и коллекторные пульсации.
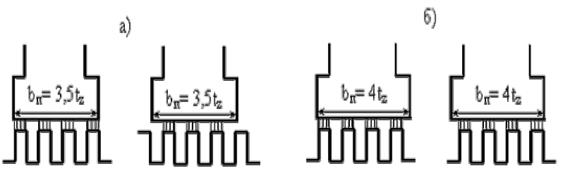
Зубцовые пульсации обуславливаются зубчатым строением якоря, что приводит к периодическому изменению проводимости воздушного зазора. С целью устранения зубцовых пульсаций выполняют скос пазов, выбирают такую ширину полюсного наконечника, в пределах которой укладывается целоечисло зубцовых делений (рис. 4.14, а,б). Иногда применяют магнитные клинья.
Якорные пульсации обуславливаются неравномерным воздушным зазором, неодинаковой магнитной проводимостью вдоль и поперек проката. Для ослабления этой причины выполняют относительно большой зазор, по высокому классу точности обрабатывают посадочные поверхности, применяют высококачественные подшипники, выполняют веерообразную шихтовку сердечника якоря.
Коллекторные пульсации возникают из–за конечного числа коллекторных пластин, неплотного прилегания щеток, вибраций щеточного узла. Для их устранения выполняют максимально возможное число коллекторных пластин, тщательно подбирают ширину щеток, улучшают качество изготовления щеткодержателей, коллектора и т.д.
24. Индукционные машины систем синхронной
связи – сельсины
Общие положения
В различных отраслях промышленности, в системах автоматики и контроля часто возникает необходимость синхронного и синфазного вращения или поворота двух и более осей, механически не связанных друг с другом. Такие задачи решаются с помощью систем синхронной связи.
Различают два вида систем синхронной связи: синхронного вращения ("электрический вал"); и синхронного поворота ("передача угла").
В простейшем случае "электрический вал" может быть реализован на двух одинаковых асинхронных двигателях с фазным ротором, обмотки статора которых питаются от одной и той же сети трехфазного тока, а обмотки ротора соединены друг с другом (рис.5.1).
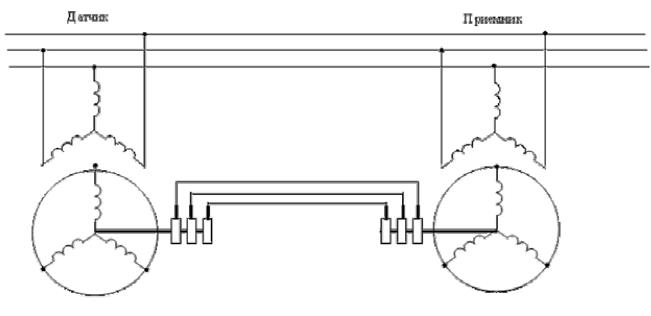
Рис. 5.1. Схема "электрического вала"
Системы передачи угла осуществляются с помощью специальных индукционных микромашин – сельсинов. Сельсинами (от английского слова "selfsinchroniring") называются электрические микромашины переменного тока, обладающие свойством самосинхронизации.
Сельсины бывают трехфазные и однофазные.
Трехфазные сельсины конструктивно ничем не отличаются от асинхронных двигателей с фазным ротором. Однако они не получили большого распространения главным образом из–за неравенства синхронизирующих моментов при повороте ротора по полю и против поля.
Однофазные сельсины конструктивно похожи на синхронные машины малой мощности, обмотка возбуждения которых питаются переменным током.
В системах автоматики "передача угла" осуществляется по двум, принципиально разным схемам: индикаторной и трансформаторной.
Индикаторная схема используется там, где на приемной оси небольшой момент статического сопротивления (стрелка, шкала прибора и т.п.). В этих схемах сельсин–приемник самостоятельно отрабатывает угол, заданный датчиком.
Трансформаторная схема применяется в тех случаях, когда на приемной оси имеется значительный момент сопротивления. В таких схемах сельсин–приемник лишь управляет мощным силовым двигателем, осуществляющим поворот какого–то механизма.
Строго говоря, в каждой схеме должны использоваться свои сельсины: индикаторные или трансформаторные, хотя один и тот же сельсин может работать в любой из них.
Дата добавления: 2022-02-05; просмотров: 576;
Поиск по сайту
Узнать еще
- google_protectAndRun("ads_core.google_render_ad", google_handleError, google_render_ad); Великие географические открытия Запада и Востока ч.1
- А параметр этого потока
- Автоматизированный комплекс технической диагностики ЭЛЕКТРОПОЕЗДОВ ПОСТОЯННОГО И ПЕРЕМЕННОГО ТОКОВ
- АКТИВНОЕ СОПРОТИВЛЕНИЕ В ЦЕПИ ПЕРЕМЕННОГО ТОКА
- Активные четырехполюсники постоянного тока
- Активные четырехполюсники постоянного тока
- Анализ магнитных цепей постоянного тока
- Анализ организационно-технологической схемы проектируемого потока

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
