Погрешности асинхронного тахогенератора
Выражение (4.2) свидетельствует о том, что выходное напряжение является комплексной величиной, поэтому можно говорить об амплитудной и фазовой погрешностях АТГ.
Амплитудной погрешностью называется отклонение реальной характеристики  от идеальной (рис. 4.2). Ее определяют как выраженное в процентах отношение разницы напряжений идеального (прямая 1) и реального (кривая 2) тахогенераторов к номинальному напряжению идеального АТГ
от идеальной (рис. 4.2). Ее определяют как выраженное в процентах отношение разницы напряжений идеального (прямая 1) и реального (кривая 2) тахогенераторов к номинальному напряжению идеального АТГ  .
.
Уменьшению амплитудной погрешности способствует правильная калибровка АТГ, т.е. настройка схемы, в которой работает АТГ, на оптимальный наклон идеальной выходной характеристики АТГ. Так, если диапазон измеряемых частот вращения невелик, настройку лучше выполнить в соответствии с рис.4.2, а. Если же диапазон достаточно широк, целесообразно откалибровать АТГ по рис. 4.2, б.
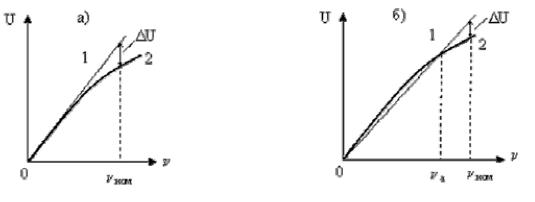
Рис. 4.2. К вопросу о калибровке асинхронного тахогенератора при малом диапазоне
скоростей вращения а) и широком б)
 .
.
В этом случае [3].
Физическая природа амплитудной погрешности обуславливается рядом факторов. Во– первых, падением напряжения в генераторной обмотке  во–вторых, изменением тока возбуждения, а следовательно, и магнитного потока
во–вторых, изменением тока возбуждения, а следовательно, и магнитного потока  в результате размагничивающего действия трансформаторной ЭДС ротора. Поток генераторной обмотки
в результате размагничивающего действия трансформаторной ЭДС ротора. Поток генераторной обмотки  направлен встречно потоку
направлен встречно потоку  и немного уменьшает его – это третья причина амплитудной погрешности (рис. 4.3, а). Ротор хотя и обладает большим активным сопротивление, все же имеет некоторое индуктивное сопротивление, в следствие чего поток содержит продольно–размагничивающую составляющую
и немного уменьшает его – это третья причина амплитудной погрешности (рис. 4.3, а). Ротор хотя и обладает большим активным сопротивление, все же имеет некоторое индуктивное сопротивление, в следствие чего поток содержит продольно–размагничивающую составляющую  , которая немного размагничивает АТГ, что является четвертой причиной амплитудной погрешности (рис. 4.3, б). И, наконец, от потока в роторе индуцируется ЭДС вращения, создающая ток и дополнительный магнитный поток, действующий на встречу потоку возбуждения (рис. 4.3, в). Поскольку эта дополнительная ЭДС пропорциональна угловой скорости вращения, ток возбуждения с увеличением
, которая немного размагничивает АТГ, что является четвертой причиной амплитудной погрешности (рис. 4.3, б). И, наконец, от потока в роторе индуцируется ЭДС вращения, создающая ток и дополнительный магнитный поток, действующий на встречу потоку возбуждения (рис. 4.3, в). Поскольку эта дополнительная ЭДС пропорциональна угловой скорости вращения, ток возбуждения с увеличением  вынужден возрастать, что приводит к увеличению падения напряжения в обмотке возбуждения и уменьшению потока . В этом заключается пятая причина амплитудной погрешности АТГ.
вынужден возрастать, что приводит к увеличению падения напряжения в обмотке возбуждения и уменьшению потока . В этом заключается пятая причина амплитудной погрешности АТГ.
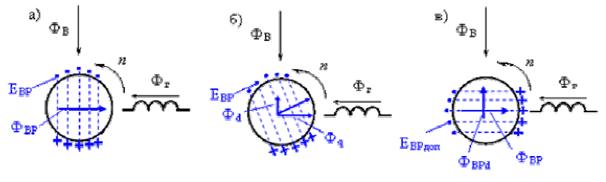
Рис. 4.3. К вопросу о причинах амплитудной погрешности асинхронного тахогенератора
Фазовая погрешность – отклонение фазы выходного напряжения от фазы напряжения, принятого за базовое. Чаще всего в качестве последнего берут напряжение возбуждения.
Физическая природа фазовой погрешности в основном определяется индуктивными сопротивлениями статора и особенно ротора. Ее, как и амплитудную, можно уменьшить путем соответствующего выбора характера нагрузки (рис. 4.4).
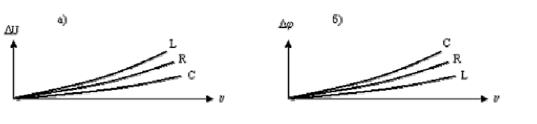
Рис.4.4. Зависимость амплитудной и фазовой погрешностей АТГ от скорости вращения при различном характере нагрузки
На рис. 4.4 построены зависимости амплитудной и фазовой погрешностей в функции частоты вращения при разном характере нагрузки (R – чисто активная, L – чисто индуктивная, C – чисто емкостная) для АТГ откалиброванного согласно рис. 4.2, а.
Из рис. 4.4 видно, что нельзя одновременно понизить и амплитудную, и фазовую погрешности. В тоже время видно, что, подключая параллельно генераторной обмотке различные сопротивления (осуществляя компаундирование), можно существенно уменьшить одну из них. Обычно ту, которая наиболее существенна для конкретной схемы работы АТГ.
На рис. 4.5 построены упрощенные векторные диаграммы асинхронного тахогенератора, иллюстрирующие влияние характера нагрузки на величину фазовой погрешности. Вектор тока возбуждения показан без основной и компенсирующей составляющих. Угол  обусловлен соотношением активного и реактивного сопротивления ротора.
обусловлен соотношением активного и реактивного сопротивления ротора.
Опыт и рис. 4.4 показывают, что амплитудная и фазовая погрешности сравнительно невелики при малых . Поэтому целесообразно ограничить диапазоны измеряемых относительных угловых скоростей вращения значениями 0÷0,25 для АТГ высокого класса точности и 0÷0,7 для остальных АТГ.
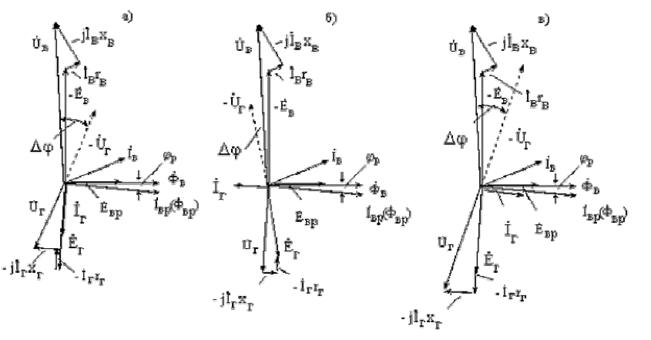
Рис. 4.5. Упрощенные векторные диаграммы АТГ при разных нагрузках: а)  б)
б)  в)
в) 
Нулевой сигнал – напряжение на генераторной обмотке при неподвижном роторе. Нулевой сигнал  не остается постоянным при повороте ротора. Он содержит две составляющие: постоянную и переменную (рис. 4.6).
не остается постоянным при повороте ротора. Он содержит две составляющие: постоянную и переменную (рис. 4.6).
Постоянная составляющая обуславливается: а) неточным сдвигом обмоток на 90 эл. град; б) наличием короткозамкнутых контуров в сердечниках и обмотках; в) неодинаковой магнитной проводимостью вдоль и поперек проката; г) неравномерным воздушным зазором; д) наличием потоков рассеяния и другими причинами, проводящими к магнитной связи двух, казалось бы, перпендикулярных обмоток. У большинства АТГ она достигает 25÷100 мВ. Переменная составляющая обуславливается неодинаковой толщиной стенок в различных частях полого ротора, что приводит к разности активных сопротивлений элементарных контуров, к разности токов и потоков этих контуров. Она составляет 3÷7 мВ.
Для борьбы с постоянной составляющей нулевого сигнала, обмотки часто размещают на разных статорах: одну на внутреннем, другую на внешнем, а затем при сборке АТГ внутренний статор поворачивают до тех пор, пока нулевой сигнал не станет минимальным. В этом положении статор фиксируют.
Для борьбы с переменной составляющей ротор калибруют, т.е. удаляют часть металла, добиваясь его максимальной электрической симметрии.
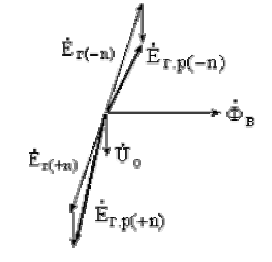
Рис. 4.7. К вопросу об асимметрии выходного напряжения АТГ
Асимметрия выходного напряжения – неравенство напряжений АТГ при вращении с одинаковой угловой скоростью в противоположных направлениях:  . Особенно ярко она проявляется на малых частотах вращения. Главная причина несимметрии заключается в наличии остаточной ЭДС (нулевого сигнала). Действительно, при смене направления вращения фаза основной ЭДС генераторной обмотки
. Особенно ярко она проявляется на малых частотах вращения. Главная причина несимметрии заключается в наличии остаточной ЭДС (нулевого сигнала). Действительно, при смене направления вращения фаза основной ЭДС генераторной обмотки  изменяется на
изменяется на  , тогда как фаза нулевого сигнала остается постоянной (рис. 4.7). В результате результирующая ЭДС выходной обмотки изменяется по величине:
, тогда как фаза нулевого сигнала остается постоянной (рис. 4.7). В результате результирующая ЭДС выходной обмотки изменяется по величине: 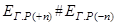 . Самый эффективный способ борьбы с асимметрий выходного напряжения является уменьшение нулевого сигнала.
. Самый эффективный способ борьбы с асимметрий выходного напряжения является уменьшение нулевого сигнала.
Температурная погрешность. При изменении температуры окружающей среды, при нагревании АТГ в процессе работы изменяются активные сопротивления обмоток статора и ротора. Это приводит к дополнительному отклонению выходной характеристики от идеальной, к появлению дополнительных амплитудных и фазовых погрешностей. Наибольшее влияние в этом отношении оказывает изменение сопротивления обмотки возбуждения. Поэтому часто последовательно с ней включают терморезисторы, стабилизирующие полное сопротивление этой цепи.
С целью уменьшения влияния температуры на сопротивление ротора, его изготавливают из материала с низким температурным коэффициентом (манганина константана и др.)
Акселерометр
Рис. 4.8. К вопросу о принципе действия акселерометра
Если обмотку возбуждения асинхронного тахогенератора питать постоянным током, он приобретает новое качество. Постоянный магнитный поток индуцирует в роторе ЭДС вращения  , которая создает ток и магнитный поток, направленный по поперечной оси тахогенератора
, которая создает ток и магнитный поток, направленный по поперечной оси тахогенератора  (рис.4.8). Этот поток, будучи сцепленным с витками генераторной обмотки, наводит в ней ЭДС, пропорциональную производной угловой скорости вращения вала.
(рис.4.8). Этот поток, будучи сцепленным с витками генераторной обмотки, наводит в ней ЭДС, пропорциональную производной угловой скорости вращения вала.
Другими словами, тахогенератор стал измерителем не скорости вращения а ее изменения (ускорения или замедления), т.е. акселерометром.
Как датчик ускорения АТГ часто используется в измерительных и испытательных системах, например для записи кривой момента асинхронного двигателя и регистрации паразитных моментов от высших гармоник магнитного поля.
Дата добавления: 2022-02-05; просмотров: 442;
Поиск по сайту
Узнать еще
- I. Погрешности механической обработки. Точность обработки. Методы их расчёта
- Абсолютная и относительная погрешности
- Абсолютные и относительные погрешности
- Автоматизация пуска и торможения 3-фазного асинхронного двигателя
- Алгоритм расчета пусковой диаграммы асинхронного двигателя с фазным ротором.
- Анализ КС методом асинхронного моделирования.
- Аналитический метод определения погрешности схемы измерительного устройства.
- Асинхронного двигателя

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
