Бесконтактные двигатели постоянного тока
Двигатели постоянного тока обычного исполнения имеют ценное качество–возможность широко и плавно регулировать скорость вращения. Вместе с тем они обладают существенным недостатком, обусловленным щеточно–коллекторным узлом. Вполне естественно, что появилась мысль создать двигатели, обладающие достоинствами двигателей постоянного тока и свободные от их недостатков. Такие двигатели называются бесконтактными двигателями постоянного тока.

Рис.5.1. Структурная схема бесконтактного двигателя постоянного тока
Бесконтактные двигатели постоянного тока состоят из трех элементов (рис. 5.1):
1) бесконтактного двигателя с  –фазной обмоткой на статоре и возбужденным ротором обычно в виде постоянного магнита;
–фазной обмоткой на статоре и возбужденным ротором обычно в виде постоянного магнита;
2) датчика положения ротора (ДПР), выполненного в одном корпусе с двигателем и предназначенного для выработки сигналов управления моментами времени и последовательностью коммутации токов в обмотках статора;
3) коммутатора, как правило, транзисторного, осуществляющего по сигналам ДПР коммутацию токов в обмотках статора.
Принцип действия бесконтактного двигателя рассмотрим на примере упрощенной схемы (рис. 5.2). В ее состав входит двигатель с тремя обмотками на статоре, сдвинутыми в пространстве на 120 градусов и соединенными в звезду, ДПР с одним сигнальным элементом (СЭ) и тремя чувствительными элементами (ЧЭ) (их число равно числу обмоток статора), коммутатор, выполненный на трех транзисторах, работающих в ключевом режиме, т.е. в режиме "закрыт" или "открыт".
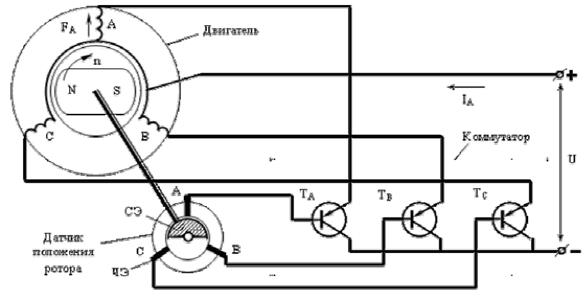
Рис. 5.2. Упрощенная принципиальная схема бесконтактного двигателя постоянного тока
В положении, показанном на рис. 5.2, сигнальный элемент через чувствительный элемент "А" открывает транзистор  . По обмотке А протекает ток
. По обмотке А протекает ток  . Намагничивающая сила обмотки
. Намагничивающая сила обмотки  взаимодействует с потоком постоянного магнита ротора. Возникает вращающий момент, и двигатель приходит во вращение (1–й такт на рис. 5.3). Вместе с ротором поворачивается и СЭ ДПР. При повороте ротора на угол чуть больший
взаимодействует с потоком постоянного магнита ротора. Возникает вращающий момент, и двигатель приходит во вращение (1–й такт на рис. 5.3). Вместе с ротором поворачивается и СЭ ДПР. При повороте ротора на угол чуть больший  СЭ будет воздействовать сразу на два ЧЭ: на "А" и на "В". Это значит, что будут открыты
СЭ будет воздействовать сразу на два ЧЭ: на "А" и на "В". Это значит, что будут открыты
сразу два транзистора: и  . Ток будет протекать по обеим обмоткам А и В. Появится результирующая НС статора
. Ток будет протекать по обеим обмоткам А и В. Появится результирующая НС статора  , которая повернется на
, которая повернется на  по сравнению с первым положением (2–й такт на рис. 5.3).
по сравнению с первым положением (2–й такт на рис. 5.3).
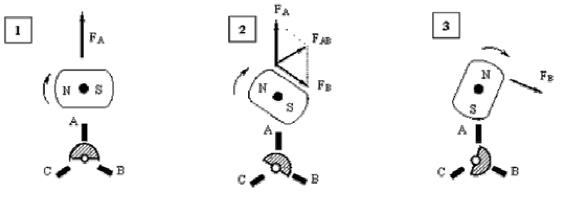
Рис. 5.3. Первых 3 такта в работе бесконтактного двигателя постоянного тока
Эта НС продолжает взаимодействовать с полем постоянного магнита; двигатель продолжает развивать вращающий момент.
Когда угол поворота станет чуть больше  , транзистор закроется, ток будет проходить только по обмотке В. Поле ротора будет взаимодействовать только с НС этой обмотки, однако вращающий момент по–прежнему будет воздействовать на ротор двигателя и вращать его в том же направлении (3–й такт на рис. 5.3). В конечном итоге двигатель разовьет такую скорость, при которой его момент будет уравновешиваться моментом нагрузки.
, транзистор закроется, ток будет проходить только по обмотке В. Поле ротора будет взаимодействовать только с НС этой обмотки, однако вращающий момент по–прежнему будет воздействовать на ротор двигателя и вращать его в том же направлении (3–й такт на рис. 5.3). В конечном итоге двигатель разовьет такую скорость, при которой его момент будет уравновешиваться моментом нагрузки.
Если бы бесконтактный двигатель имел обмоток, чувствительных элементов и транзисторов столько же, сколько обычный двигатель имеет коллекторных пластин, то по своим свойствам и характеристикам они ничем бы не отличались друг от друга. Однако увеличение числа элементов сильно усложняет конструкцию машины. Поэтому в реальных двигателях число обмоток, а соответственно, и число чувствительных элементов и транзисторов не превышает 3–4.
Малое число обмоток обусловливает ряд особенностей работы бесконтактного двигателя постоянного тока.
1. Пульсация вращающего момента – возникает вследствие скачкообразного перемещения НС статора (см. положения 1,2,3 рис. 5.3). В соответствии с общими законами электромеханического преобразования энергии момент бесконтактного двигателя может быть определен как скалярное произведение магнитного потока ротора и НС взаимодействующих обмоток статора
 (5.1)
(5.1)
где  – постоянный коэффициент;
– постоянный коэффициент;  – угол между потоком ротора и НС статора.
– угол между потоком ротора и НС статора.
Так как при вращении двигателя угол непрерывно меняется, то и момент двигателя не остается постоянным.
2. Реакция якоря периодически изменяется, становясь то поперечной, то продольно намагничивающей, то продольно размагничивающей (рис. 5.4). Объясняется это опять–таки скачкообразным перемещением НС статора (якоря). Размагничивающее действие поля статора особенно сильно при пуске двигателя, т.к. при этом противо–ЭДС равна 0, а ток – наибольший. С этим необходимо считаться при выборе постоянных магнитов, стабилизация которых происходит в режиме короткого замыкания.
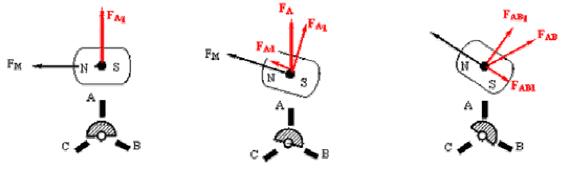
Рис. 5.4. Реакция якоря в бесконтактном двигателе постоянного тока
3. Пульсация токов в обмотках статора и суммарного тока двигателя объясняется дискретным питанием обмоток (в тот момент, когда открыты два транзистора, потребляемый ток вырастает в два раза по сравнению с режимом, когда открыт только один транзистор).
4. Влияние индуктивности обмоток статора. В обычном двигателе секции якоря маловитковые, поскольку общее число витков якоря делится на большое число секций. Индуктивность таких секций сравнительно небольшая. В бесконтактном двигателе общее число витков якоря разбивается на 3–4 обмотки (секции). В результате секции получаются многовитковыми, а, следовательно, обладающими большой индуктивностью т.к. 
С учетом ряда допущений уравнение напряжения для якоря можно записать в виде
 (5.2)
(5.2)
Решая его относительно тока, получим
 , (5.3)
, (5.3)
где  – электромагнитная постоянная времени.
– электромагнитная постоянная времени.
Выражение перед круглой скобкой есть ток якоря при отсутствии индуктивности. Тогда
 . (5.4)
. (5.4)
При больших скоростях, когда время коммутации невелико, ток в обмотках не успевает достигать установившегося значения. Его эффективное значение становится меньше, чем при  .
.
Вращающий момент прямо пропорционален току якоря, поэтому
 (5.5)
(5.5)
или
 (5.6)
(5.6)
Анализ выражения (5.6) показывает, что момент имеет две составляющие. Первую – не зависящую от времени. Она равна моменту при отсутствии индуктивности. Вторую – переменную. Она появляется из–за индуктивности обмоток. Эта составляющая при всех скоростях имеет отрицательное значение  . Поэтому можно утверждать, что, как и ток, вращающий момент бесконтактного двигателя меньше, чем вращающий момент обычного коллекторного двигателя.
. Поэтому можно утверждать, что, как и ток, вращающий момент бесконтактного двигателя меньше, чем вращающий момент обычного коллекторного двигателя.
Подставим значение ЭДС  в формулу (5.6), получим механическую характеристику бесконтактного двигателя
в формулу (5.6), получим механическую характеристику бесконтактного двигателя
 (5.7)
(5.7)
Выразим эту характеристику в относительных единицах, приняв за базисный момент пусковой момент (  ,
,  ), а за базисную скорость – скорость холостого хода (
), а за базисную скорость – скорость холостого хода (  , ). Время
, ). Время 
 ;
;  .
.
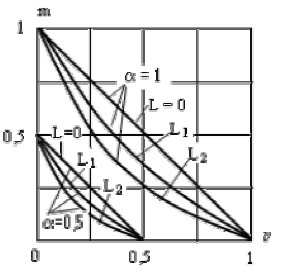
Рис. 5.6. Механические характеристики бесконтактного двигателя постоянного тока при разных значения  и
и  :
: 
Разделим обе части уравнения (5.7) на  :
:
 . (5.8)
. (5.8)
Обозначим  . С учетом
. С учетом  получим
получим
 , (5.9)
, (5.9)
где  – относительная скорость двигателя.
– относительная скорость двигателя.
На рис. 5.6 показаны механические характеристики бесконтактного двигателя при разных индуктивностях обмоток статора L. Видно, что с увеличением L нелинейность характеристик увеличивается.
Частоту вращения бесконтактных двигателей можно регулировать в широких пределах путем изменения напряжения питания.
Однако на практике чаше применяется импульсный способ, сущность которого заключается в изменении не величины постоянно подводимого напряжения, а длительности питания двигателя номинальным напряжением.
Датчики положения ротора.Датчики положения ротора определяются их чувствительными элементами, которые могут быть построены с использованием ЭДС Холла, фотоэффекта и т.д.
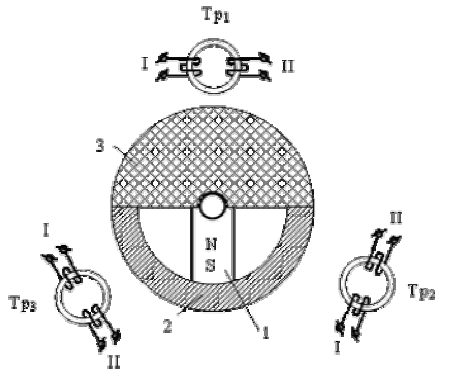
Рис. 5.7. Датчик положения ротора трансформаторного типа
Достаточно широкое распространение получили датчики электромагнитного – трансформаторного типа. На рис. 5.7. показан один из них.
Чувствительными элементами датчика являются три трансформатора (  ,
,  ,
,  ), сдвинутыми в пространстве на 120 эл. град. Сердечники трансформаторов выполняются из быстронасыщающихся материалов – феррита, пермалоя и тр. Первичные обмотки трансформаторов (I) питаются напряжением высокой частоты (порядка нескольких килогерц) от маломощного источника. Вторичные обмотки через диоды включаются в базы соответствующих транзисторов.
), сдвинутыми в пространстве на 120 эл. град. Сердечники трансформаторов выполняются из быстронасыщающихся материалов – феррита, пермалоя и тр. Первичные обмотки трансформаторов (I) питаются напряжением высокой частоты (порядка нескольких килогерц) от маломощного источника. Вторичные обмотки через диоды включаются в базы соответствующих транзисторов.
Ротор датчика состоит из постоянного магнита 1, полюсного наконечника 2, выполненного из магнитомягкого материала, и немагнитного полуцилиндра 3.
Элементам конструкции датчика придаются такие формы и они располагаются так, чтобы сердечники трансформаторов, перекрытые полюсным наконечником 2, были насыщенными. В этом случае ЭДС вторичных обмоток трансформаторов (II) практически равны нулю и сигналы на базы транзисторов не поступают. Управляющие сигналы поступают только от тех трансформаторов, сердечники которых не насыщены.
Вопросы:
1) Нарисуйте диаграмму НС обмоток статора (подобную положениям 1,2,3 на рис. 5.3) при условии, что дуга чувствительного элемента не 180° , а 120° .
2) Чему равна величина суммарного тока, потребляемого двигателем из сети, при различных углах поворота ротора и дуге ЧЭ в  ?
?
Дата добавления: 2022-02-05; просмотров: 802;
Поиск по сайту
Узнать еще
- google_protectAndRun("ads_core.google_render_ad", google_handleError, google_render_ad); Великие географические открытия Запада и Востока ч.1
- А параметр этого потока
- Автоматизированный комплекс технической диагностики ЭЛЕКТРОПОЕЗДОВ ПОСТОЯННОГО И ПЕРЕМЕННОГО ТОКОВ
- АКТИВНОЕ СОПРОТИВЛЕНИЕ В ЦЕПИ ПЕРЕМЕННОГО ТОКА
- Активные четырехполюсники постоянного тока
- Активные четырехполюсники постоянного тока
- Анализ магнитных цепей постоянного тока
- Анализ организационно-технологической схемы проектируемого потока

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
