Синхронные гистерезисные микродвигатели
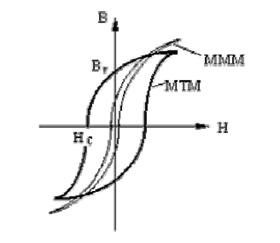
Рис. 3.13. Зависимости  магнитотвердых (МТМ) и магнитомягких (МММ)
магнитотвердых (МТМ) и магнитомягких (МММ)
материалов
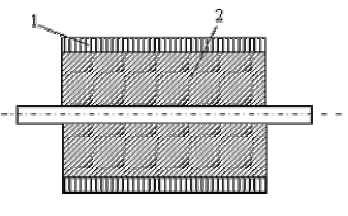
Статор синхронного гистерезисного микродвигателя (СГМД) ничем не отличается от статора известных синхронных и асинхронных микродвигателей. Ротор СГМД – гладкий неявнополюсный и состоит из двух частей (рис. 3.12): сплошного или шихтованного цилиндра 1 из магнитотвердого материала (МТМ), посаженного на немагнитную или ферромагнитную втулку 2.
Для выяснения принципа действия СГМД примем ротор целиком состоящим из МТМ, обладающего широкой петлей гистерезиса (рис. 3.13).
При включении обмотки статора в сеть возникает вращающееся магнитное поле, которое мы представим в виде постоянного магнита (рис.3.14). Под действием внешнего поля ротор намагнитится, т.е. его элементарные магнитики (домены, размер которых не превышает  см) сориентируются по полю и займут положение, показанное на рис. 3.14,а.
см) сориентируются по полю и займут положение, показанное на рис. 3.14,а.
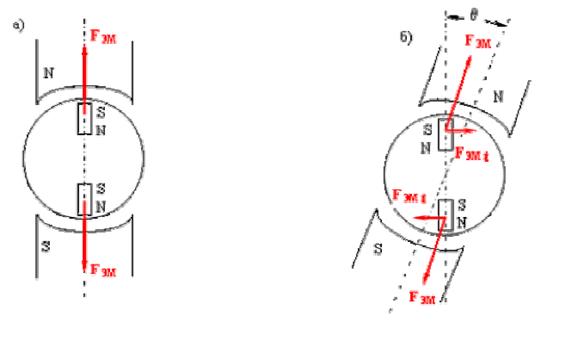
Рис. 3.14. К вопросу о принципе действия синхронного гистерезисного микродвигателя
Силы магнитного притяжения, действующие на ротор, направлены радиально, взаимно уравновешиваются и никакого момента не развивают. При повороте поля статора (рис. 3.14,б) вслед за ним будут стремиться повернуться элементарные магнитики ротора. Однако вследствие межмолекулярного трения, которое у магнитотвердого материала весьма значительное (явление гистерезисного запаздывания), их поворот будет отставать от поля статора на некоторый угол  . Силы магнитного притяжения в этом случае, кроме радиальных, получат тангенциальные составляющие, которые и создадут гистерезисный момент.
. Силы магнитного притяжения в этом случае, кроме радиальных, получат тангенциальные составляющие, которые и создадут гистерезисный момент.
Значение гистерезисного момента определяется векторным произведением магнитных потоков ротора  и статора
и статора  [3]:
[3]:
 ,
,
где  – коэффициент пропорциональности, зависящий от параметров СГМД.
– коэффициент пропорциональности, зависящий от параметров СГМД.
Магнитные потоки статора и ротора, пространственный угол , на который поток ротора отстает от потока статора, при симметричном питании не зависят от скорости вращения и определяются той коэрцитивной силой НС, при которой начинается поворот элементарных магнитиков. Это значит, что гистерезисный момент не зависит от скорости вращения, поэтому для пуска двигателя не требуется пусковая обмотка, необходимая для других синхронных двигателей.
В синхронном режиме ротор вращается синхронно с полем статора, поэтому ротор не перемагничивается. Его поток сохраняется за счет остаточной индукции  и вращается вместе с ротором с синхронной скоростью Поток тем больше, чем выше остаточная индукция. Двигатель работает как обычный синхронный двигатель с постоянными магнитами. Отличие только в том, что угол отставания оси поля ротора от оси поля статора не может превысить угол гистерезисного запаздывания. Для большинства двигателей в номинальном режиме угол нагрузки не превышает
и вращается вместе с ротором с синхронной скоростью Поток тем больше, чем выше остаточная индукция. Двигатель работает как обычный синхронный двигатель с постоянными магнитами. Отличие только в том, что угол отставания оси поля ротора от оси поля статора не может превысить угол гистерезисного запаздывания. Для большинства двигателей в номинальном режиме угол нагрузки не превышает  .
.
При асинхронном пуске СГМД, пока скорость ротора не равна скорости поля статора, кроме гистерезисного момента на ротор действует асинхронный момент, возникающий от взаимодействия магнитного потока статора и вихревых токов ротора (МВТ). В этом режиме момент двигателя равен 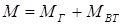 .
.
Найдем величину результирующего момента. Известно, что электромагнитная мощность, передаваемая со статора на ротор, равна потерям в роторе, поделенным на скольжение двигателя  .
.
 Потери на вихревые токи пропорциональны квадрату частоты перемагничивания
Потери на вихревые токи пропорциональны квадрату частоты перемагничивания  , а потери на гистерезис – частоте перемагничивания в первой степени
, а потери на гистерезис – частоте перемагничивания в первой степени  . Тогда
. Тогда

где  ,
,  – потери на гистерезис и вихревые токи в неподвижном роторе
– потери на гистерезис и вихревые токи в неподвижном роторе  .
.
Вращающий момент СГМД равен

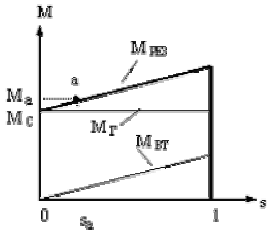
Рис. 3.15. Механическая характеристика СГМД и ее составляющие
На рис. 3.15 показана механическая характеристика и ее составляющие для идеального СГМД. В реальных двигателях характеристики не такие линейные, поскольку сказывается действие высших гармоник поля, кроме того, в двухфазных конденсаторных двигателях оно в большинстве случаев эллиптическое. Необходимо отметить, что в случае шихтованного цилиндра из МТМ и немагнитной втулки ротора момент вихревых токов практически равен нулю.
Гистерезисные микродвигатели могут работать в синхронном и асинхронном режимах. В этом легко убедиться, рассматривая рис. 3.15. Пока момент нагрузки не больше МС, СГМД работает как синхронный двигатель (его скольжение равно 0). При больших нагрузках он переходит в асинхронный режим (точка а). Причем переход из одного режима в другой и обратно происходит плавно, без рывков, что является одним из достоинств СГМД.
Исследования показали, что гистерезисный момент можно рассчитать по формуле
 ,
,
где:  – удельные потери на гистерезис (величина пропорциональная площади петли гистерезиса);
– удельные потери на гистерезис (величина пропорциональная площади петли гистерезиса);  – объем магнитотвердого материала;
– объем магнитотвердого материала;  – частота сети;
– частота сети;  – синхронная угловая частота вращения;
– синхронная угловая частота вращения;  – число пар полюсов.
– число пар полюсов.
Перемагничивание ротора происходит под действием НС статора, которая в СГМД сравнительно небольшая. Поэтому для каждого конкретного двигателя существует такой объем , при котором произведение  будет максимальным. Действительно, если чрезмерно велико, то НС статора не сможет перемагнитить такой объем по предельной петле гистерезиса, перемагничивание будет идти по одной из частных петель гистерезиса, что соответствует малому значению . С другой стороны, при чрезмерно малом НС статора его легко перемагнитит. Но все равно, перемагничивание не может
будет максимальным. Действительно, если чрезмерно велико, то НС статора не сможет перемагнитить такой объем по предельной петле гистерезиса, перемагничивание будет идти по одной из частных петель гистерезиса, что соответствует малому значению . С другой стороны, при чрезмерно малом НС статора его легко перемагнитит. Но все равно, перемагничивание не может
осуществляться по петле, большей предельной.
Требованию  отвечают две конструкции ротора (рис. 3.16).
отвечают две конструкции ротора (рис. 3.16).
В первой – втулка выполняется из ферромагнитного материала. Поток статора проходит в радиальном направлении, поэтому объем перемагничиваемого магнитотвердого материала здесь сравнительно небольшой, следовательно, он должен иметь достаточно широкую петлю гистерезиса  .
.
Во второй – втулка выполняется из немагнитного материала (алюминий или пластмасса). Магнитный поток статора проходит в основном по гистерезисному слою, поэтому объем перемагничиваемого материала сравнительно большой, следовательно, он должен быть с относительно узкой петлей гистерезиса  [3].
[3].
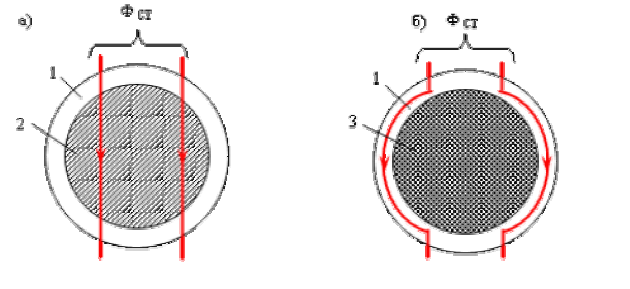
Рис. 3.16. Конструктивные схемы ротора СГМД: с ферромагнитной втулкой (а)
и с немагнитной втулкой (б) 1 – кольцо из МТМ; 2 – ферромагнитная втулка; 3 – немагнитная
втулка
Схема замещения СГМД приведена на рис. 3.17. Она содержит следующие сопротивления [1]:
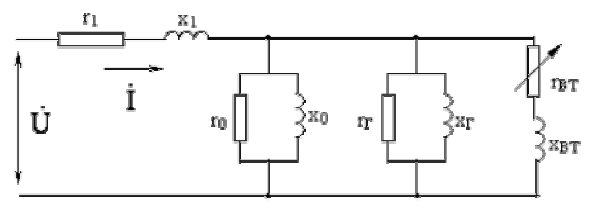
Рис. 3.17. Схема замещения синхронного гистерезисного микродвигателя
 ,
,  – активное и реактивное сопротивления фазы статора;
– активное и реактивное сопротивления фазы статора;  ,
,  – активное
– активное
сопротивление, эквивалентное потерям в стали, индуктивное сопротивление,
обусловленное магнитной проводимостью воздушного зазора;  ,
,  – активное и реактивное сопротивления контура, учитывающего явление гистерезиса (первое эквивалентно потерям на гистерезис, второе – обусловливается магнитной проводимостью МТМ);
– активное и реактивное сопротивления контура, учитывающего явление гистерезиса (первое эквивалентно потерям на гистерезис, второе – обусловливается магнитной проводимостью МТМ);  ,
,  – активное и реактивное сопротивление контура, учитывающего действие вихревых токов ( – эквивалентно потерям от этих токов, – обусловливается потоками рассеяния от вихревых токов). В синхронном режиме
– активное и реактивное сопротивление контура, учитывающего действие вихревых токов ( – эквивалентно потерям от этих токов, – обусловливается потоками рассеяния от вихревых токов). В синхронном режиме  , поэтому данная ветвь разрывается.
, поэтому данная ветвь разрывается.
Достоинства гистерезисных микродвигателей:
1) большой пусковой момент и момент входа в синхронизм;
2) плавность входа в синхронизм;
3) малое изменение тока статора (20 – 30 %) от пуска до холостого хода;
4) полисинхронизм – способность одного и того же ротора работать в статорах с различным числом полюсов;
5) сравнительно высокий КПД (до 60 %);
6) малый уровень шума.
7)
Недостатки гистерезисных микродвигателей:
1) низкий  , что обусловливается низкой магнитной проводимостью МТМ и большим намагничивающим током. Кстати, этим объясняется малая кратность пускового тока;
, что обусловливается низкой магнитной проводимостью МТМ и большим намагничивающим током. Кстати, этим объясняется малая кратность пускового тока;
2) большой технологический разброс характеристик двигателя из–за очень высокой чувствительности МТМ к отклонениям температуры от установленного значения при термической обработке;
3) качания ротора – значительные колебания мгновенной скорости ротора при резких изменениях нагрузки:
–  у СГМД и
у СГМД и
–  у двигателей с постоянными магнитами.
у двигателей с постоянными магнитами.
Попытки уменьшить качания ротора путем покрытия его тонким слоем меди не привели к желаемому результату.
Дата добавления: 2022-02-05; просмотров: 612;
Поиск по сайту
Узнать еще
- Асинхронные двигатели
- Асинхронные двигатели. Конструкция, принцип действия
- Асинхронные исполнительные двигатели
- АСИНХРОННЫЕ ИСПОЛНИТЕЛЬНЫЕ ДВИГАТЕЛИ
- Асинхронные счетчики
- Асинхронные электродвигатели взрывозащищенного исполнения серии ВАОВ
- Асинхронные электродвигатели с фазным ротором в крановых электроприводах
- Асинхронные электродвигатель серии N 560 Y2 мощностью 2500 кВт

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
