Кинематическое исследование механизмов
Целью кинематического исследования механики является определение положения звеньев в механизме, траектории определенных точек, определение скоростей звеньев и скоростей отдельных точек механизма, определение ускорений отдельных точек механизма.
Кинематическое исследование в механике может выполняться аналитическим методом, графическим методом и графоаналитическим способом.
Аналитический метод. Этот метод заключается в использование аналитических соотношений, связывающих кинематические параметры ведущего звена и ведомых звеньев, с помощью метрических характеристик.





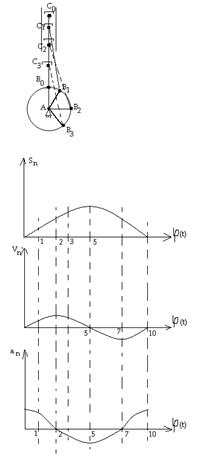
Графический метод (метод кинематической диаграммы)
План скоростей механизма и его свойства
Для выполнения кинематического исследования любым методом должны быть заданы размеры звеньев и закон движения ведущего звена.
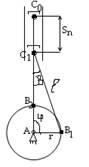
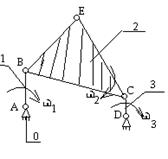
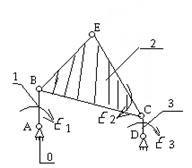
1) Вычерчивается план механизма (кинематическая схема) для исследуемого положения в масштабе  , где lAB – фактическая, натуральная дина; АВ – изображение звена на плане механизма
, где lAB – фактическая, натуральная дина; АВ – изображение звена на плане механизма


2) Определяем скорость точки В: 
3)Записываем векторные уравнения для определения скорости т. С


4)Для решения векторного уравнения графическим методом построим план скоростей в масштабе 
5) Определяем значение скоростей из построенного плана




6) Записываем векторные уравнения для определения скорости т. Е и аналогично решаем


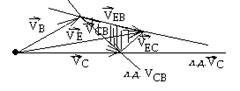
Свойства плана скоростей
1) Вектор, выходящий из полюса плана скоростей, представляет собой абсолютную скорость точек звеньев механизма (VB; VЕ; VС)
2) Векторы, соединяющие на плане скоростей концы векторов абсолютных скоростей, представляют собой относительные скорости (VCB; VEB)
3) Теорема подобия. Концы векторов абсолютных скоростей точек механизма, жёстко связанных между собой или принадлежащих одному звену, образуют подобиные фигуры, сходственно расположенные и повёрнутые на 90 в сторону вращения звена, относительно фигур, образованных этими же точками на плане механизма.
План ускорений механизма и его свойства
Для выполнения кинематического исследования любым методом должны быть заданы размеры звеньев и закон движения ведущего звена.
1) Вычерчивается план механизма (кинематическая схема) для исследуемого положения в масштабе , где lAB – фактическая, натуральная дина; АВ – изображение звена на плане механизма
2) Определяем ускорение точки В: 

 , т.к.
, т.к. 
3)Записываем векторные уравнения для определения ускорения т. С


4)Для решения векторного уравнения графическим методом построим план ускорений в масштабе  . Определяем отрезки для построения известных ускорений на плане:
. Определяем отрезки для построения известных ускорений на плане:


5) Определяем значение ускорений из построенного плана


6) Записываем векторные уравнения для определения ускорения т. Е и аналогично решаем


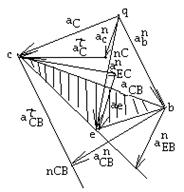
Свойства плана ускорений:
1) Вектор, выходящий из полюса плана ускорений, представляет собой абсолютное ускорение точек звеньев механизма (аB; аЕ; аС)
2) Отрезки, соединяющие на плане ускорений концы абсолютных ускорений, представляют собой полное относительное ускорение (aCB; aEB; aEC)
3) Теорема подобия. Концы векторов абсолютных ускорений точек звеньев механизма, жёстко связанных между собой или принадлежащих одному звену, на плане ускорений изображают подобиные фигуры, сходственно расположенные и повёрнутые на угол (180-α),  , относительно фигур, образованных этими же точками на плане механизма.
, относительно фигур, образованных этими же точками на плане механизма.
Без использования угла α подобные фигуры можно построить с использованием правила обхода точек, которое должно быть одинаково на плане механизма и плане ускорений.
Дата добавления: 2021-12-14; просмотров: 478;
Поиск по сайту
Узнать еще
- II. Темы рефератов, ориентированные на исследование и анализ методологических идей и концепций крупнейших представителей современной философии и естествознания.
- III. Исследование личностных особенностей подростков
- Im7im9im11Исследование памяти
- VI. АГРАФИЯ. ИССЛЕДОВАНИЕ ПИСЬМА
- VII. АЛЕКСИЯ. ИССЛЕДОВАНИЕ ЧТЕНИЯ
- Аналитическое исследование
- Архитектура сетевых механизмов обеспечения качества обслуживания в IP-ориентированных сетях.
- АУСКУЛЬТАЦИЯ СЕРДЦА. ИССЛЕДОВАНИЕ АРТЕРИЙ И ВЕН

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
