Действующие в механизмах силы
Все силы, действующие на звенья механизма, можно разделить на задаваемые и реакции связи.
Реакции связи кинематических пар, также как и силы трения, по отношению к каждому звену, входящему в кинематическую пару, являются внешними, а ко всему механизму в целом – внутренними.
Задаваемые силы разделяются на следующие виды:
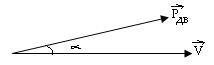
1). Движущиеся – эти силы приводят механизм в движение, за всё время его рабочего цикла. Работа этих сил положительная и называется затраченной. Направление этих сил совпадает с направлением скорости точек их приложения или образуют с ними острый угол.
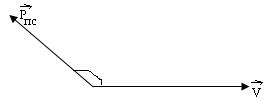
2). Силы полезных или производственных сопротивлений (технологическое сопротивление) – это силы, для преодоления которых создаётся механизм. Работа этих сил отрицательная и называется полезной. Они направлены в сторону противоположную скорости точек их приложения или образуют тупой угол.
3). Силы вредных сопротивлений (силы трения) возникают как результат взаимосопротивления соприкасающихся звеньев к их относительному перемещению. Работа этих сил отрицательна и называется вредной. Направлены они также как и силы полезных сопротивлений.
*Полная работа сил сопротивления будет складываться из полезной и вредной работ сил сопротивления
4). Силы тяжести. Всегда направлены вниз. Работа этих сил положительна, если центр масс звена опускается и отрицательна – если поднимается. Величина этих сил определяется конструкцией и материалом звеньев.
5). Силы упругости создаются пружинами, которые устанавливаются в кулачковых механизмах или в пружинных двигателях прибора – в этом случае силы упругости являются движущимися. При сжатии пружины сила упругости препятствует движению расположенному рядом с ней звена, а при распрямлении – способствует движению этого звена, а, следовательно, и механизма. Иногда установка пружины объясняется необходимостью восприятия инерционных нагрузок.
6). Силы инерции. Впервые исследовались Ампером в 1743 г. Звенья плоских механизмов имеют плоскость симметрии параллельно плоскости движения. Главный вектор и главный момент сил инерции этих звеньев определяется по формулам:
 - вектор i-го звена
- вектор i-го звена
 - момент i-го звена
- момент i-го звена
 - ускорение центра масс i-го звена
- ускорение центра масс i-го звена
 - момент инерции i_го звена механизма относительно оси, проходящей через центр масс перпендикулярно плоскости движения
- момент инерции i_го звена механизма относительно оси, проходящей через центр масс перпендикулярно плоскости движения
 - угловое ускорение i-го звена
- угловое ускорение i-го звена
Дата добавления: 2021-12-14; просмотров: 513;
Поиск по сайту
Узнать еще
- А) Опыт по определению силы Ампера
- А.1 Силы, действующие на мобот при прямолинейном движении.
- Анализ движения рабочей силы и использования рабочего времени
- Аэродинамические силы
- Быстродействующие ключи на биполярном транзисторе
- Быстродействующие магнитные усилители Рейми
- Вандерваальсовы силы
- Величина мышечной силы.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
