Связь координат точек снимка и местности. Формулы взаимного перехода от одной системы координат к другой.
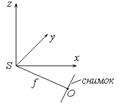
 Пусть из центра проекции S сделан снимок местн., на кот. отразилась т. мест-ти А в виде т. а. Вектор
Пусть из центра проекции S сделан снимок местн., на кот. отразилась т. мест-ти А в виде т. а. Вектор  обозначим через RSA. = RSA. = r. Введем вектор RА и RS., RSA=mr, где m – масштаб.
обозначим через RSA. = RSA. = r. Введем вектор RА и RS., RSA=mr, где m – масштаб.
 RSA= RА - RS; RА - RS= mr. Это уравнение коллиниарности векторов. Перепишем его в координатном виде:
RSA= RА - RS; RА - RS= mr. Это уравнение коллиниарности векторов. Перепишем его в координатном виде:  ;
;  ; XA-XS=mx; YA-YS=my; ZA-ZS=mz; Тогда, XA=XS+mx; YA=YS+my;
; XA-XS=mx; YA-YS=my; ZA-ZS=mz; Тогда, XA=XS+mx; YA=YS+my;  ; Тогда:
; Тогда:  ;
;  Координаты точек снимка x, y, z даны в фотограмметрической системе координат, начало которой перенесено в точку фотографирования S. А снимок находится под наклоном к данной системе координат на углы α, ω, æ.
Координаты точек снимка x, y, z даны в фотограмметрической системе координат, начало которой перенесено в точку фотографирования S. А снимок находится под наклоном к данной системе координат на углы α, ω, æ.
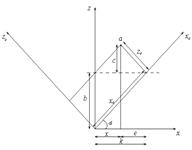 В системе координат снимка координаты точки определяются следующими значениями xc, yc, zc=-f. Задача заключается в том, чтобы от координат xc, yc, zc= -f перейти к координатам x, y, z используя углы Эйлера α, ω, æ. Угол α – лежит в плоскости Z
В системе координат снимка координаты точки определяются следующими значениями xc, yc, zc=-f. Задача заключается в том, чтобы от координат xc, yc, zc= -f перейти к координатам x, y, z используя углы Эйлера α, ω, æ. Угол α – лежит в плоскости Z  X , разворот осуществл. по осиY, угол ω – в пл-ти Y Z , разворот по оси X,угол χ - в пл-ти Y X , разворот по оси Z Покажем связь между данными системами координат на примере угла α:
X , разворот осуществл. по осиY, угол ω – в пл-ти Y Z , разворот по оси X,угол χ - в пл-ти Y X , разворот по оси Z Покажем связь между данными системами координат на примере угла α:
Даны: xc, zс, α; Найти: x, z Решение: z=b+c , b=xcsinα , c=zccosα , z= xcsinα+ zccosα , x=k-е , k= xccosα , e= zcsinα , x= xccosα- zcsinα Таким образом: x= xccosα- zcsinα , z= xcsinα+ zccosα В общем виде это можно записать так:  Аналог данной формулы для угла ω будет следующим:
Аналог данной формулы для угла ω будет следующим: 
Для угла æ:  Вводим обозначения
Вводим обозначения 


Тогда 
 Тогда вид формул связи координат соответствующих точек снимка и местности будет следующим:
Тогда вид формул связи координат соответствующих точек снимка и местности будет следующим: 
 Подставляя значения x, y, z в данные выражения найдем окончательный вид формул связи:
Подставляя значения x, y, z в данные выражения найдем окончательный вид формул связи: 
 -координаты точки А мест-ти,
-координаты точки А мест-ти,  - координаты центра проекции; X,Y,-f – координаты точек на наклон. снимке.
- координаты центра проекции; X,Y,-f – координаты точек на наклон. снимке.
Дата добавления: 2021-12-14; просмотров: 717;
Поиск по сайту
Узнать еще
- A. Узагальнені координати і узагальнені швидкості та прискорення
- B). Система относительных координат.
- F45.38 другие органы или системы
- I. История возникновения и развития классно-урочной системы.
- I. Понятие о принципах обучения, их взаимосвязь.
- I. Развитие Донбасса в условиях кризиса феодально-крепостнической системы
- I. Создание системы управленческого учета.
- III. Взаимосвязь потребления, сбережений и инвестиций. Парадокс бережливости.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
