Измерение расстояния по времени прохождения сигнала
Рассмотрим три метода измерения расстояния, основанные на определении времени прохождения сигнала между объектом и приемником. Два из них – лазерные, один – ультразвуковой.
Первый метод – измеряется время, в течение которого посланный вдоль оси световой импульс возвращается вдоль той же оси от отражающей поверхности. Расстояние до объекта определяется по формуле  , где Т – время прохождения сигнала и с – скорость света (0,3 м/нс). Частота отсчета должна быть 50 Гц для достижения точности измерения порядка
, где Т – время прохождения сигнала и с – скорость света (0,3 м/нс). Частота отсчета должна быть 50 Гц для достижения точности измерения порядка  мм.
мм.
Лазерные измерители дают двухмерный массив со значениями, пропорциональными расстоянию. Двухмерное сканирование выполняется путем отклонения лазерного луча вращающимся зеркалом. Рабочая зона этого устройства находится в пределах 1-4 метра, точность  мм.
мм.
Во втором случае вместо импульсного светового сигнала используется непрерывный луч лазера и измеряется задержка (т.е. фазовый сдвиг) между посылаемыми и возвращенными лучами (рис. 21-1).
Луч лазера с длиной волны  расщеплен на два луча. Один из них (опорный «луч отсчета») проходит расстояние L к фазометру, а другой проходит расстояние D до отражающей поверхности. Общее расстояние, пройденное отраженным лучом, составляет
расщеплен на два луча. Один из них (опорный «луч отсчета») проходит расстояние L к фазометру, а другой проходит расстояние D до отражающей поверхности. Общее расстояние, пройденное отраженным лучом, составляет  . Фазовый сдвиг между двумя лучами в точке измерения (рис. 21.1,б) возникает в случае, если отраженный луч проходит путь больший, чем исходящий. В этом случае имеем:
. Фазовый сдвиг между двумя лучами в точке измерения (рис. 21.1,б) возникает в случае, если отраженный луч проходит путь больший, чем исходящий. В этом случае имеем:
 . (21-1)
. (21-1)
Так как , подставив это значение в уравнение (21-1), получим:
 , (21-2)
, (21-2)
что определяет расстояние через фазовый сдвиг, если известна длина волны (632,8 нм у гелий-неонового лазера). При такой малой длине волны метод, схема которого показана на рис. 21.1, нецелесообразно применять в робототехнике из-за сложности определения малых фазовых смещений.
Наиболее приемлемым решением является амплитудное модулирование лазерного луча волной с гораздо большей длиной, например, 30 метров (f=10 МГц) (рис. 21.2). Основная процедура остается прежней, но сигнал отсчета является теперь функцией модулирования. Модулированный лазерный сигнал посылается на объект, а возвращенный сигнал демодулируется и сравнивается с отсчетным сигналом для определения фазового сдвига.
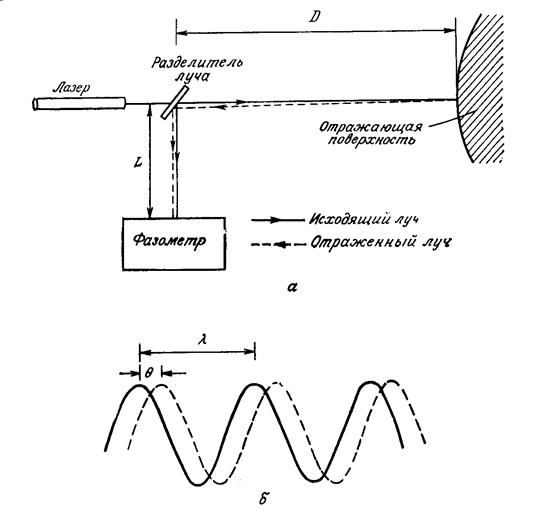
Рисунок 21.1. Принцип измерения расстояния по фазовому сдвигу (а) и сдвиг между исходящей и отраженной световыми волнами (б)
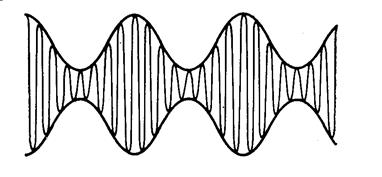
Рисунок 21.2. Волновой сигнал, модулированный по амплитуде модулирующей функцией с гораздо большей длиной волны
Равенство (21-2) все еще имеет силу, но теперь работа происходит в более удобном диапазоне длин волн.
Третьим методом измерения является ультразвуковой метод, реализующим идею измерения расстояния по времени прохождения сигнала.
Ультразвуковой сигнал передается за короткий промежуток времени и, так как скорость звука известна для определенной среды, простое вычисление, включающее интервал времени между посылаемым и отраженным сигналами, дает оценку расстояния до отражающей поверхности.
Например, в ультразвуковой измерительной системе, выпускаемой фирмой Polaroid, сигнал длительностью 1 мс, состоящий их 56 импульсов четырех частот (50, 53, 57, 60 кГц), передается датчиком диаметром ~38 мм. Сигнал, отраженный объектом, улавливается тем же датчиком и, проходя через усилитель и схему индикации, способен измерять расстояние в диапазоне ~0,3-10 м с точностью до 2,5 см. Смешанные частоты сигнала используются для улучшения устойчивости сигнала. Отклонение в направленности этого прибора составляет ~30°. Ультразвуковые датчики применяются в робототехнике преимущественно в навигации и для обхода препятствий.
Дата добавления: 2021-11-16; просмотров: 524;
Поиск по сайту
Узнать еще
- II. Затраты (времени, физических сил, финансовых средств и т.д.)
- II. Измерение оптической плотности раствора.
- Z-преобразование синусной компоненты выходного сигнала связано с Z-преобразованием входного сигнала следующим соотношением
- А плотность распределения вероятности промежутков времени между заявками
- А. Метод заряда с измерением характеристик электрического поля
- Алгоритм БПФ с прореживанием по времени
- Алгоритм разложения сигнала по неортогональному базису
- Анализ движения рабочей силы и использования рабочего времени

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
