Элементы датчика схвата, встроенного в запястье
Датчики представляют собой небольшие, чувствительные, легкие (~370 грамм) и относительно компактные конструкции диаметром 10 см и толщиной 3 см с динамическим диапазоном до 90 кг. Для уменьшения гистерезиса и увеличения точности измерения датчик обычно выполняют из одной твердой металлической заготовки (как правило, алюминиевой).
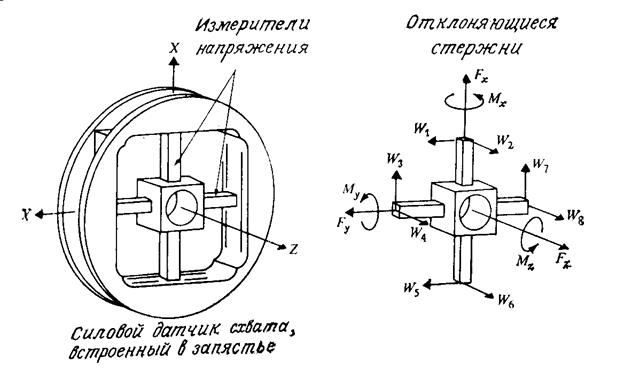
Рисунок 23.5. Силовой датчик схвата, встроеный в запястье
Например, датчик, показанный на рис. 23.5, содержит восемь пар полупроводниковых измерителей механических напряжений, установленных на четырех отклоняющихся стержнях – по одному измерителю на каждой стророне стержня. Дифференциальное включение измерителей обеспечивает автоматическую компенсацию изменений температуры. Это первичная грубая компенсация. Так как восемь пар измерителей напряжения расположены нормально к осям х, у и z системы координат сил, три компоненты силы F и три компоненты момента М могут быть определены соответствующим сложением или вычитанием выходных напряжений (токая компенсация). Важно, чтобы движения в схвате, производимые силовыми датчиками, не влияли на точность позиционирования манипулятора.
Требования к датчикам:
1. Высокая жесткость. Частота собственных колебаний механического устройства связана с его жесткостью, следовательно, высокая жесткость обеспечивает быстрое демпфирование возникающих колебаний при измерении сил и точность показаний на коротких временных интервалах. Это снижает величину отклонений от действия сил и моментов, которая может привести к ошибке позиционирования манипулятора.
2. Компактность конструкции. Это позволяет облегчить движение манипулятора в условиях навала деталей, а также уменьшить вероятность столкновения датчика с объектами, находящимися в рабочем пространстве. Компактный датчик можно размещать ближе к расположенному в схвате технологическому оборудованию, благодаря чему уменьшается ошибка позиционирования оборудования из-за неадекватности рабочих условий оборудования и датчика. Желательно расширить диапазон измерения сил и моментов. Этому способствует минимизация расстояния между манипулятором и датчиком, приводящая к уменьшению величины рычага прикладываемых к манипулятору сил.
3. Линейность. Хорошая линейность выхода чувствительных элементов от прикладываемых сил и моментов позволяет выделить силы и моменты с помощью простых матричных операций. Упрощается процесс калибровки датчика силы.
4. Малые величины гистерезиса и внутреннего трения. Внутреннее трение уменьшает чувствительность измерительных элементов. Это также уменьшает гистерезисные эффекты при возвращении измерительного прибора в исходное положение.
Дата добавления: 2021-11-16; просмотров: 587;
Поиск по сайту
Узнать еще
- IV.3. Элементы стратегии выживания человечества
- VI.II. Элементы складки
- А - решетчатая конструкция из бетонных элементов; б - пространственная георешетка; в - укрепление откоса георешеткой; 1, 2 - бетонные элементы; 3 - анкеры; 4 - тяжи анкеров
- Активные и пассивные элементы электрических цепей. Закон Ома
- Анализ возможных последствий неадекватного поведения элемента на смежные элементы
- Архитектурные элементы
- Б. Элементы контрольных приспособлений
- Базовые логические элементы

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
