Ультразвуковые датчики
Характеристики всех рассмотренных датчиков измерения в ближней зоне сильно зависят от материала объектов измерения. Эта зависимость может быть в значительной степени уменьшена путем использования ультразвуковых датчиков (рис. 22.3).
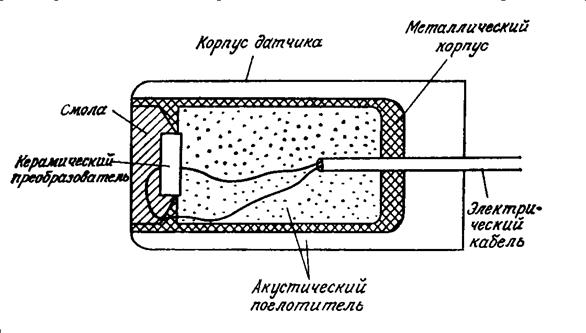
Рисунок 22.3. Ультразвуковой датчик измерения в ближней зоне
Основным элементом датчика является электроакустический преобразователь, в качестве которого часто используется пьезоэлектрический керамический элемент. Подложка из смолы защищает преобразователь от влажности, пыли и других внешних воздействий. Она служит также как переходное акустическое сопротивление. Поскольку один и тот же преобразователь используется обычно как для передачи, так и для приема сигналов, для обнаружения объектов в ближней зоне необходимо быстрое демпфирование акустической энергии. Это достигается путем применения акустических поглотителей и развязкой преобразователя от корпуса. Конструкция корпуса позволяет получить узкий акустический поток, дающий мощный направленный сигнал.
Для лучшего понимания работы ультразвукового датчика измерителя в ближней зоне надо провести анализ сигналов, используемых как для передачи, так и для приема акустической энергии (рис. 22.4).
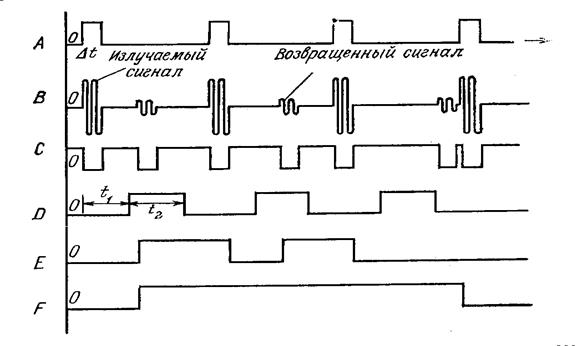
Рисунок 22.4. Сигналы, используемые в ультразвуковом датчике измерения
в ближней зоне
Сигнал А является запорным сигналом, используемым для управления посылаемыми сигналами.
Сигнал В содержит выходной и отраженный сигналы.
Сигнал С – выделяет сигналы передачи или приема. Для того, чтобы установить различие между посылаемыми и принимаемыми сигналами, вводятся временные окна (сигнал D). Временной интервал  является минимальным временем измерения, а
является минимальным временем измерения, а  - максимальным. Эти временные интервалы соответствуют прохождению определенных расстояний со скоростью распространения звука в используемой рабочей среде.
- максимальным. Эти временные интервалы соответствуют прохождению определенных расстояний со скоростью распространения звука в используемой рабочей среде.
После получения отраженного сигнала (в то время, когда сигнал D имеет максимальное значение), вырабатывается сигнал Е, величина которого принимает нулевое значение после окончания действия передающего импульса А.
Сигнал F вырабатывается при появлении положительного импульса Е и сбрасывается в случае отсутствия сигнала Е и появления импульса А.
Таким образом, сигнал F будет иметь максимальное значение при наличии объекта на расстоянии, определяемом параметрами сигнала D, т.е. сигнал F является выходным сигналом ультразвукового датчика, работающего в бинарном режиме.
Дата добавления: 2021-11-16; просмотров: 640;
Поиск по сайту
Узнать еще
- Акустические датчики
- Взвешивающие устройства АШЛ - датчики натяжения каната
- Генераторные датчики
- Гидростатические датчики уровня
- Гирокомпасы как датчики направлений. Принципы работы ГК, их особенности. Эксплутационные проверки.
- Датчики (измерительные преобразователи).
- ДАТЧИКИ ВЫСОТЫ И СКОРОСТИ
- Датчики двигателей с впрыском топлива

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
