Контроллер размещается в уменьшенном стальном корпусе NEMA-4 размером 380 х 380 х 210 мм.
· MOSCAD-RTU (рис. 2.6.3) - мощный контроллер, поддерживающий большое количество вводов/выводов (максимум 83 модуля, т. е. более 1000 вводов/выводов - зависит от набора модулей).
Количество и состав модулей подбирается под конкретный объект. Основные модули для контроллера MOSCAD: 60DI, 16DI плюс 2 счетных входа, 32DO, 16DO, 8DO, 8AI, 4AO, Mixed I/O.
ЦПУ контроллера выполнен на микропроцессоре Motorola 68302. Многозадачная ОС, математическое обеспечение пакетного связного контроллера и пользовательская управляющая программа записываются во Flash-память (1Мб). Текущая информация хранится в ОЗУ (до 1,2 Мб). При необходимости ЦПУ может быть доукомплектован математическим сопроцессором.
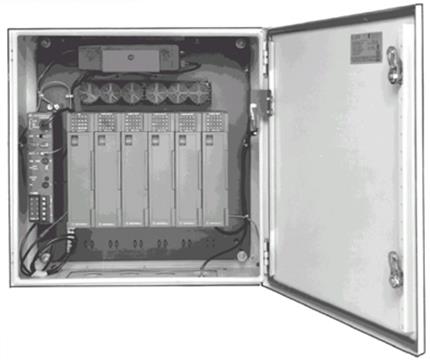
Рис. 2.6.3. Контроллер MOSCAD-RTU в корпусе NEMA.
Вычислительные возможности контроллеров и использование различных модулей ввода /вывода позволяют не только принимать входную информацию и перерабатывать по определенным алгоритмам, а также выполнять функции контроля, управления и аварийной сигнализации состояния любого объекта. Для управления объектами могут использоваться алгоритмы практически любой сложности. В библиотеку функций входят специализированные функции для расчета массовых расходов при использовании расходомеров скоростного напора, массовых и объемных расходов при использовании вертушечных расходомеров, а также функция ПИД-регулирования.
Для связи с внешними устройствами, в том числе и с другими RTU, в модуле ЦПУ имеются три порта:
- порт 1 - RS-485 или RS-232 (конфигурируется программно);
- порт 2 - RS-232;
- порт 3 - сменный интерфейс (выбирается при заказе): радиомодем, линейный модем, RS-232.
Как и все контроллеры семейства, контроллер MOSCAD снабжен резервной аккумуляторной батареей на случай отсутствия сетевого напряжения.
Конструктивно контроллер изготавливается в различных вариантах:
- в корпусе NEMA-4 (до 6 модулей) размером 500 х 500 х 210 мм;
- бескорпусный ("рэковый") вариант для монтажа на 19" стойку.
Имеются стойки для размещения 15 модулей ввода/вывода, а также дополнительный стоечный модуль для получения общего количества в 83 модуля ввода/вывода.
Обмен данными.
Все контроллеры семейства имеют единую систему связи с протоколом обмена MDLC(Motorola Data Link Communication). Каждый контроллер - это ПЛК плюс полнофункциональный пакетный контроллер, способный осуществлять прием, передачу, буферизацию и маршрутизацию пакетов информации в сети MDLC. Протокол позволяет одновременный обмен Host - RTU, RTU - Host, RTU - RTU. При его использовании в системах телемеханики протокол поддерживает:
- интегрированные сети с проводными и беспроводными каналами связи;
- дистанционный контроль и управление с использованием как процедуры опроса из центра, так и спонтанной передачи информации по инициативе RTU;
- проведение нескольких логических сеансов связи одновременно по одному физическому каналу;
- передачу информации от удаленных КП к нескольким контрольным центрам и передачу информации от КП к КП, если это необходимо;
- технологию"Store & Forward" (запомни и передай дальше) и маршрутизацию пакетов данных, используя пакетные коммуникационные контроллеры ПКК-Р в качестве коммуникационной сети;
- точную временную синхронизацию в системе и посылку информации с временными метками с разрешением 2 мс.
Организация сбора информации в системе программируется разработчиком, используя следующие процедуры:
- циклический опрос из центра (устаревшая технология);
- по расписанию (например, каждые 5 минут);
- по событию - новая технология, позволяющая снизить нагрузку на каналы связи и ускорить доставку информации в системах с большим количеством контроллеров и сложной сетевой архитектурой;
- любой комбинации перечисленных методов.
Информация в системе MOSCAD может передаваться от любого RTU к любому, а не только к Host-компьютеру. Передача происходит сразу, как только в этом возникла необходимость, не дожидаясь запроса из центра, по инициативе каждого RTU, точнее его операционной системы или управляющей программы, написанной пользователем или разработчиком системы. При управлении передачей данных драйвером ОС используется протокол MDLC. Если же передача данных находится под управлением прикладной программы, то может быть реализован практически любой протокол связи с контроллерами и устройствами третьих фирм.
Причем контроллеры могут использовать практически любые каналы связи: телефонные выделенные или коммутируемые линии, кабельные или воздушные линии связи, витые пары, оптоволокно, радиоканал УКВ.
Благодаря наличию в модуле ЦПУ трех портов существует большое количество вариантов взаимодействия контроллеров семейства MOSCAD между собой и с верхним уровнем. Для расширения коммуникационных возможностей в системе предусмотрены дополнительные модемы:
- проводной модем (несколько модификаций);
- радиомодем MOSCAD 500.
Проводной модем.
MOSCAD RTU может общаться с контроллером верхнего уровня или с себе подобными по проводному каналу (телефонная сеть) посредством модемов. Каждый модем состоит из двух частей: платы электроники и линейного интерфейса. Плата электроники устанавливается в модуле ЦП (вместо радио-интерфейса, т. е. без сохранения радиоканала в RTU, так как линейный интерфейс модема размещается на месте, предназначенном для радиостанции). Источником питания при этом служит питание контроллера, включая и батарею.
Модификация RTU с монтажным шасси предусматривает дополнительное место для линейного интерфейса, что позволяет при необходимости обеспечить как проводную, так и радиосвязь (радиомодем).
 |
Возможны три варианта связи: 2-х проводная или 4-х проводная "точка - точка" и 2-х проводная "точка - многоточка". Взаимодействие контроллеров MOSCAD RTU между собой показано на рис. 2.6.4.
Рис. 2.6.4. Возможные варианты связи контроллеров MOSCAD.
Радиомодем.
Радиомодем MOSCAD 500 размещается в ЦПУ. Радиомодем обеспечивает последовательный (пакетный) обмен данными. Модем принимает данные, формирует пакет до 150 бит, а затем пересылает его по радиоканалу. Приемник распаковывает пакет и посылает полученные данные в подсоединенное устройство. Радиомодем MOSCAD 500 выполнен на отдельной панели, которая крепится винтами в шкафу. Рабочая температура - от -40 до + 600С.
Связь с верхним уровнем.
Для связи контроллеров семейства MOSCAD со SCADA-компьютером предусмотрен интерфейсный контроллер, в качестве которого может использоваться либо обычный контроллер MOSCAD (без модулей ввода/вывода), называемый FIU, либо один из специальных коммуникационных процессоров: MCP-M или MCP-T.

Коммуникационный процессор MCP-Mпередает информацию через порт RS-232 по протоколу Modbus. Этот протокол рекомендуется использовать для связи со SCADA-сервером в системах с небольшим количеством RTU (рис. 2.6.5).
Рис. 2.6.5. Взаимодействие контроллеров со SCADA-сервером через
Дата добавления: 2016-06-05; просмотров: 1897;
Поиск по сайту
Узнать еще
- TRACE MODE 6 SOFTLOGIC: программирование контроллеров
- Адресное пространство контроллера
- АНАЛИЗ РАБОЧИХ ПРОГРАММ.
- Архитектура БИС программируемого контроллера прерываний КР580ВН59
- Архитектура контроллера прямого доступа к памяти КР580ВТ57
- Архитектура микроконтроллеров семейства Tiny
- Бабочка с размахом крыльев 30-40 мм.
- В пределах одного чертежа размерные числа выполняют цифрами одного шрифта (чаще применяют шрифт размером 3,5).

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
