ІІ. СИСТЕМИ ТЕЛЕКОНТРОЛЮ АСП
Принципи побудови системи ТК на магістралях коаксіального кабелю
Тут реалізований принцип ВРК. Часові діаграми, що пояснюють роботу системи ТК, зображені на рис. 2.1. Цикл передачі розбитий на N підциклів, де N — число контрольованих НУП. У свою чергу, кожен підцикл розбитий на вісім тактових інтервалів (ТИ), протягом яких передається інформація про стан датчиків у відповідному НУП або команда керування. По закінченні підциклу йде імпульс запуску пристроїв у наступному НУП, тобто імпульс, що фіксує початок наступного підциклу. У кожному, наприклад 1-му, тактовому інтервалі (ТИ1) можуть прийматися імпульси, що свідчать, наприклад, про відкриття люка НУП (момент t1), або передаватися сигнали керування, наприклад, про включення або вимикання вимірювального генератора на НУП (момент t1'). Аналогічні сигнали повідомлення і керування можуть передаватися і на інших ТИ.
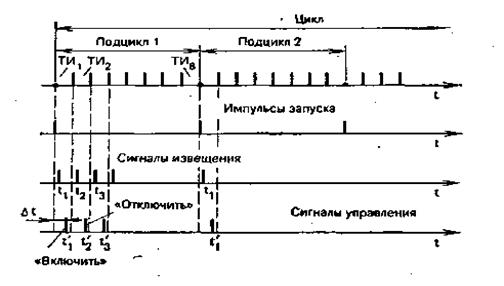
Рис. 2.1
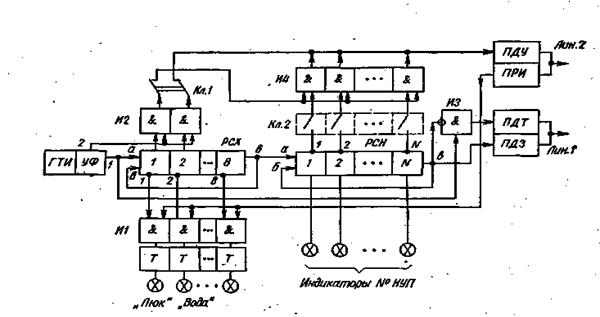
Рис. 2.2
Спрощена схема пристроїв телемеханіки ОУП представлена на рис. 2.2. Тут генератор тактових імпульсів (ГТИ) виробляє послідовність прямокутних імпульсів з частотою f=40 Гц. Пристрій формування (УФ) перетворює цю імпульсну послідовність у послідовність імпульсів тривалістю т = 1 мс. На виходах 1 і 2 схеми УФ діють імпульсні послідовності тривалістю т, зміщені по відношенню друг до друга на часовий інтервал дт«12 мс. Перша імпульсна послідовність використовується для тактової синхронізації роботи розподільників на НУП, друга – як сигнали керування. Тактові імпульси з виходу 1 схеми УФ запускають розподільник синхронізації (PCX) на ОУП. Через схему ИЗ вони також надходять на вхід передавача тактових імпульсів (ПДТ), основна функція якого складається в підсиленні імпульсів до 5...10 В. У процесі роботи PCX на виходах 1,2,...,8 по черзі з'являються імпульси, що приводять схеми И в блоці И1 по черзі в активні стани. Якщо на виході приймача сигналів повідомлення (ПРИ) з'явиться імпульс, то він пройде через відповідний тригер блоку Т и викликає появу сигналів повідомлення: «Люк», «Вода» і ін. Одночасно з PCX працює розподільник синхронізації НУП (РСН), Його стан змінюється за рахунок дії імпульсів початку (кінця) підциклу, що надходять з виходу в PCX.
Тому що виходи в розподільників PCX і РСН з'єднані також з їхніми входами б, то кожен вихідний імпульс викликає повторний запуск розподільника, у результаті чого робота цих пристроїв здійснюється беззупинно.
Сигнали керування передаються в такий спосіб. Їмпульси керування надходять з виходу 2 схеми УФ на входи схем И блоку И2. Під час дії другого тактового інтервалу на виході схеми И цього блоку з'являється імпульс, що попадає на вхід передавача імпульсів керування (ПДУ), підсилюється і надходить у лінію 2. Цей імпульс є командою «Відключити» відповідний виконавчий пристрій, наприклад вимірювальний генератор у НУП. Момент його появи t2'відзначений на часовій діаграмі (див. рис. 2.1). В результаті з ОУП у кожному підциклі надходить команда «Відключити». При необхідності включення виконавчого пристрою замикається відповідний для даного НУП ключ у блоці Кл. 2 і міняється положення Кл. 1. В результаті знімається команда «Відключити» і в ТИ підциклу, що відповідає обраному НУП, буде передаватися імпульс керування, якому відповідає команда «Включити». Такий взаємозв'язок між сигналами керування виключає небезпеку помилкового тривалого включення виконавчого пристрою на НУП. У момент закінчення підциклу з'являється імпульс на виході в РСН і одночасно з ним діє синхроімпульс на виході 1 схеми УФ. Так як в схемі ИЗ використовується інверсний вхід, то наявність на ньому сигналу 1 приводить до того, що синхроімпульс не проходить на вхід ПДТ і в активному стані буде тільки передавач імпульсу запуску (ПДЗ). Вироблений ним імпульс запуску активізує пристрої контролю на 1-му НУП, і починається новий підцикл.
Розглянемо роботу пристрою ТК на НУП, і на НУП1 (рис. 2.3). На початку циклу приймач сигналу запуску (ПРЗ) приймає сигнал запуску, посланий з ОУП по лінії 1. У результаті на вході б PCX з'явиться імпульс керування, внаслідок чого запускається PCX на даному НУП. Синхронна робота PCX на ОУП і НУП1 забезпечується за рахунок прийому синхроімпульсів приймачем тактової послідовності (ПРТ). Ця тактова послідовність імпульсів транслюється схемою ИЗ і через ПДТ передається на інші НУП, але PCX в них не запускається через відсутність сигналу запуску на вході б PCX.
У процесі роботи PCX з'являються керуючі сигнали на його виходах 1,2,... і т.д., що приводить в активний стан відповідні елементи И. Таким чином, здійснюється підготовка до передачі сигналів повідомлення з НУП1 на ОУП. Якщо, наприклад, у розглянутому НУП відкритий люк, то спрацьовує відповідний датчик і на виході 1 схеми И4 з'являється сигнал 1. Отже, на виході 3 схеми И4 протягом TИ1 діє сигнал 1, який через багатовходову схему ИЛИ попадає на вхід передавача сигналів повідомлення (ПДИ). В результаті сигнал повідомлення «Люк» надходить в бік ОУП.
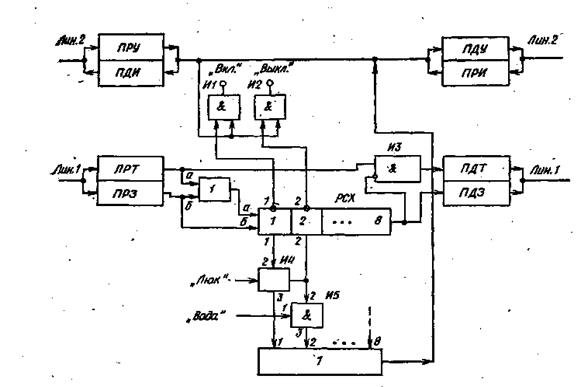
Рис. 2.3
Аналогічно спрацьовує схема И5 і т.д. По закінченні підциклу на виході PCX з'являється короткочасний імпульс і закривається схема ИЗ, спрацьовує ПДЗ і сигнал запуску ініціює роботу PCX НУП2. По закінченні дії імпульсу на виході PCX НУП1 схема ИЗ відкривається і продовжується трансляція ТИ по лінії 1.
По лінії 2 передаються сигнали повідомлення і керування, для чого використовуються передавач і приймач сигналів повідомлення (ПДИ, ПРИ), а також передавач і приймач сигналів керування (ПДУ, ПРУ).
В такий спосіб здійснюється збір інформації про стан лінійного тракту на ОУП. Описане устаткування відноситься до пристроїв дільничної телемеханіки.
Узагальнена інформація про стан лінійного тракту, зібрана з усіх ОУП, передається на ОП. Сигнали мають такий вигляд: «Попередження», «Ушкодження», «Аварія». Сигнал «Попередження» видається у випадках появи одного із сигналів повідомлення від пристроїв дільничної телемеханіки типу «Люк», «Вода», «Бал.», «Давл.» і т.д., а також у випадку зміни рівня КЧ у межах ±1,5 дБ від номінальної величини. Сигнал «Аварія» формується при заниженні всіх КЧ на 18 дБ і більше. Принцип роботи пристроїв ТК, що передають інформацію з ОУП на ОП (магістральна телемеханіка), аналогічний розглянутому вище. Однак інформація з ОУП передається в напрямку обох ОП на основі принципу реверсивно-циклічної синхронізації. Суть цього принципу полягає в тому, що опитування пристроїв ТК на ОУП відбувається по черзі з кожного ОП. Наприклад, нехай між двома ОП знаходяться три ОУП: ОУП1, ОУП2, ОУПЗ. Реверсивпо-циклічне опитування полягає в тому, що ОП1 по черзі опитуює ОУП1, ОУП2 і ОУПЗ, а потім передає керування ОП2, що у свою чергу опитує спочатку ОУПЗ, потім ОУП2 і ОУП1 і передає керування ОП1 і т.д. Інформація з кожного ОУП посилається одночасно в обидві сторони, тобто сприймається як ОП1, так і ОП2. Для роботи пристроїв магістральної телемеханіки використовується одна симметрична пара. В кожніму НУП па цій парі встановлений регенератор сигналів, що забезпечує дальність дії системи телемеханіки на відстані до 1500 км.
Дата добавления: 2021-11-16; просмотров: 839;
Поиск по сайту
Узнать еще
- F-распределение Фишера–Снедекора
- Hа pазpезе показывают то, что расположено в секущей плоскости и что pасположено за ней.
- II. Отклонения расположения поверхностей
- III. Суммарные допуски формы расположения
- III. Факторы распределения
- NPSHраспол при работе под заливом
- Oт распознавания образов к познанию: принятие решений
- T – распределение Стьюдента

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
