Источники питания на магнитных усилителях.
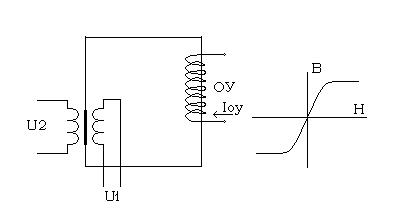
H=I1·W1+I2·W2+Iоу·Wоу .
В системах автоматического управления магнитный усилитель представляют инерционным звеном первого порядка, постоянная времени магнитного усилителя прямо пропорционально зависит от коэффициента управления и составляет 0,2-1сек. для маломощных РУ и 3-4сек. для мощных усилителей.
Тиристорные преобразователи получили широкое применение:
- в САУ ЭПС;
- в САУ индукционными плавильными и нагревательными установками;
- в САУ дуговыми печами;
- в САУ плазменно-дуговыми и электронно-лучевыми установками;
- в САУ ЭД различными механизмами всех ЭТУ.
Свойства тиристоров определяют их энергетические и динамические характеристики. В номинальном режиме КПД ТРН η≥0,98, но коэффициент мощности при работе на активной нагрузке кМ3хфазн. ТРН =0,865.
Перегрузочная способность ТРН:
для Iн=63-200А, Кп= 0,25, в течение времени:
Δt=120 сек – Кп=50%;
Δt=30 сек – Кп=100%.
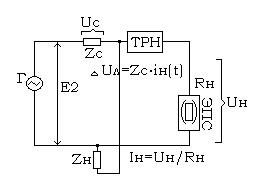
Также статическая характеристика ТРН может считаться линейной, а динамические свойства регулятора характеризуется передаточной функцией:
WТРН(р)=кТРН - инерционное звено первого порядка;
Tp+1 T – постоянная времени.
кТРН=ΔP/P ;
ΔIу/Iун
tпп3хфазн. ТРН ≤0,2сек=(3÷4)T –быстродействие.
Поэтому при расчетах систем регулирования инерционных объектов таких, как ЭПС, Т можно пренебречь и считать РН пропорциональным звеном.
Однако, регулирование напряжения в ТП сопровождается снижением cosφ и появлением высших гармонических составляющих в токе и напряжении.
Первоначальное напряжение сети строго синусоидально, однако ТРН создает токи несинусоидальной формы.
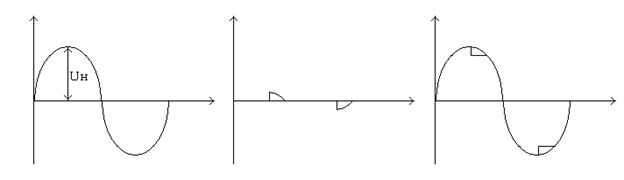
Чем ниже сопротивление, тем меньше провалы напряжения.
Эти рассуждения и заключения относились к фазоимпульсному регулированию мощности.
В ТП используют также ШИМ регулирования мощности (см. принципиальную схему ТК с промежуточным реле управления).
ШИР приводит к образованию субгармоник токов нагрузки, что вызывает низкочастотные пульсации мощности и регулируемого параметра (температуры). Поэтому такое регулирование не применяют при обработке малоинерционных (теплоинерционных) деталей: тонких проволок, лент в протяжной цепи.
С другой стороны энергетические показатели при ШИР (cosφ, потери) выше, чем при фазоимпульсной за счет большего cosφ и меньших динамических потерь в тиристоре при его включении.
Фазоимпульсное регулирование без субгармоник широко применяют для управления нагревом малых инерционных нагрузок и для управления дуговым разрядом.
Однако существуют серьезные недостатки:
- малый cosφ основной гармоники;
- искажение форм потребляемого тока требует дополнительных затрат на компенсацию реактивной мощности на основной и высших гармониках и для устранения радиопомех.
При фазоимпульсном управлении справедливы зависимости:
Ра=Uс·I1·cosφ ;
Q=Uс·I1·sinφ ;
φ= Uс^ I1.
Мощность искажения: 
Коэффициент искажения: ν=I1/I<1.
Полная мощность, потребляемая из сети: 
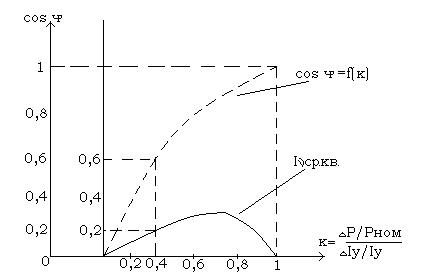
X= Ра/S= ν· cosφ.
Зависимости cosφ из среднеквадратичного значения токов высших гармоник:
С помощью компенсирующих конденсаторов можно лишь частично улучшить коэффициент мощности. Мощность конденсаторной батареи, необходимой для повышения cosφ до 1:
 , кВАр
, кВАр
к- глубина регулирования:
Рном- номинальная мощность нагрузки, кВт.
к=Рвых/Рном .
Регулирование напряжения фазоимпульсным методом целесообразно осуществлять лишь в узких пределах, поэтому его сочетают с регулированием напряжения, посредством переключения ступеней напряжения трансформатора.
К исполнительным элементам САУ ЭТУ относятся исполнительные ЭП переменного напряжения постоянного тока и ЭП переменного тока, применяются для управления золотниковой арматурой мощных гидроприводов.
Самым распространенным является управляемый 2-фазный АД с полым ротором: 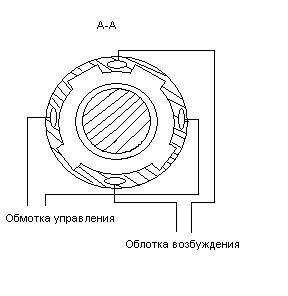
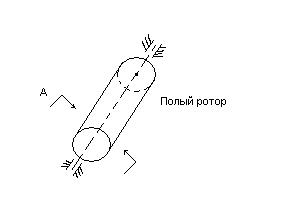
Двигатели с полым ротором – малоинерционные.
Данный электропривод является идеальным для реализации моментного двигателя.
Регулировочная характеристика:
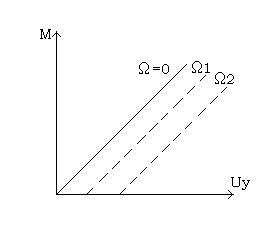
Ω0<Ω1<Ω2 .
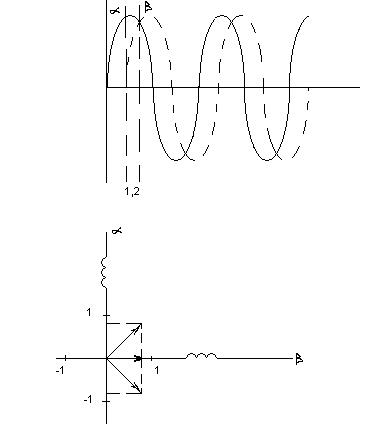
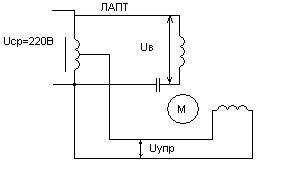
Напряжение управления является переменным. В автоматических системах меняется его амплитуда, она должна быть тем больше, чем больший момент или скорость должен развивать двигатель. Изменение амплитуды функции какого-либо сигнала называется – амплитудной модуляцией. В примере, относящемся к схеме, управляющей величиной, является угол поворота движка лабораторного автотрансформатора (ЛАТР).
Согласно зависимости:
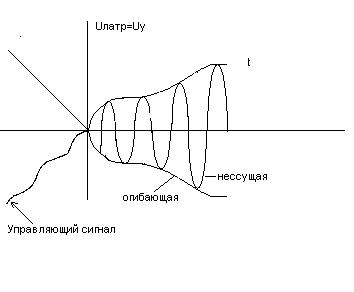
Когда такой ЭП изображается как элемент структурной схемы САР, то входной сигнал на его вход- это управляющее воздействие, соответствующее заданию на выходную величину, а сигнал этого элемента САР представляет собой огибающую; в нашем случае, зависящую от амплитуды сигнала несущей частоты в данный момент времени.
Дата добавления: 2021-11-16; просмотров: 636;
Поиск по сайту
Узнать еще
- Cварочные источники энергии.
- I. Подготовка, принятие и источники уложения. Причины создания Соборного Уложения
- I. Понятие о методах воспитания.
- I. Специфические особенности процесса воспитания в сравнении с процессом обучения.
- III. Единство и взаимосвязь процессов воспитания и обучения.
- III. Классификация методов воспитания.
- III. Основные направления развития воспитания
- IV. Основные источники поступления загрязняющих веществ в водную среду.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
